







参考视频:Apollo自动驾驶入门课程
参考车辆和硬件平台
打造一个无人车,首先要开发一款可通过电子控制的基础车辆,而不仅仅是通过实体方向盘、油门踏板和刹车踏板来控制。这种类型的车辆具有特殊的名称:
线控驾驶车辆

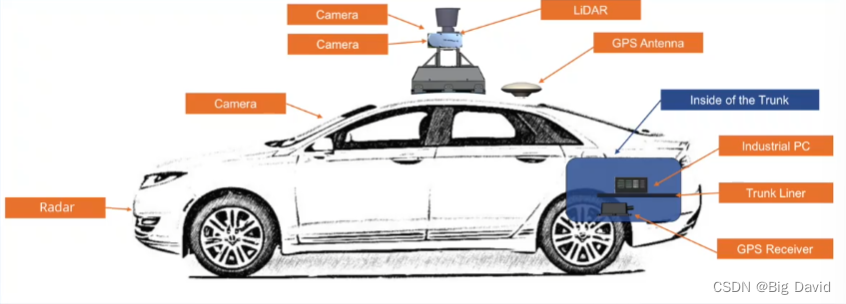
该车有多种不同的传感器,参数由参考硬件规格定义。
-
控制区域网络(CAN)
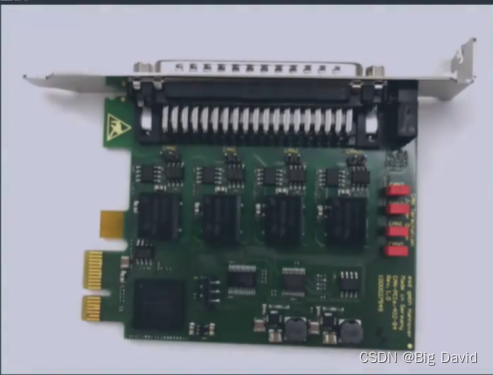
车辆的内部通信网络,计算机系统通过CAN卡连接汽车内部网络,发送加速、制动和转向信号 -
全球定位系统(GPS)
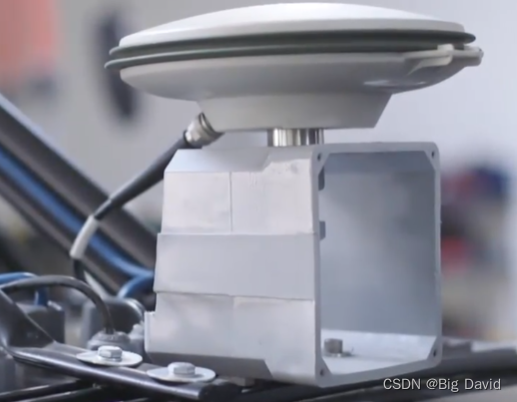
通过绕地卫星接收信号,这些信号可以帮助我们确定所处位置 -
惯性测量装置(IMU)

测量车辆的运动和位置,是通过跟踪位置、速度、加速度和其他因素 -
激光雷达(LiDAR)
 由一组脉冲激光器组成,Apollo使用的激光雷达可360度扫描车辆的周围,这些激光束的反射,形成了软件可用于了解环境的点云。
由一组脉冲激光器组成,Apollo使用的激光雷达可360度扫描车辆的周围,这些激光束的反射,形成了软件可用于了解环境的点云。 -
摄像头

用于捕获图像数据,我们可以使用计算机视觉来提取这些图像的内容并了解周围的环境。例如,摄像头可以感知颜色,可以用来检测和了解交通灯 -
雷达

用于检测障碍物,雷达分辨率低,难以分辨检测到了哪种障碍物。但优势在于经济实惠,适用于各种天气和照明条件,特别擅长测量其他车辆的速度
将主要硬件组装安装到车辆上














 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









