







 本文介绍了如何在ROS中使用nav_msgs/Path展示自定义圆形轨迹和GNSS/INS数据的实时轨迹,包括show_path.cpp代码实现、CMakeLists.txt配置以及轨迹显示效果。
本文介绍了如何在ROS中使用nav_msgs/Path展示自定义圆形轨迹和GNSS/INS数据的实时轨迹,包括show_path.cpp代码实现、CMakeLists.txt配置以及轨迹显示效果。
目录
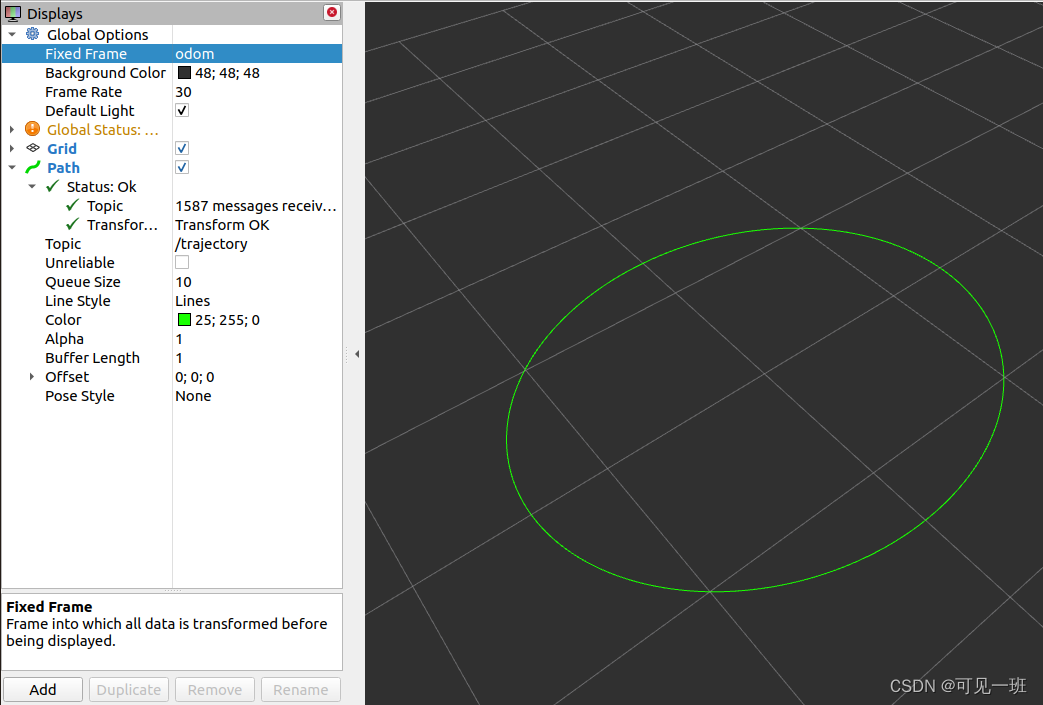
一、显示自定义圆形轨迹
参考:(九)ROS在rviz中实时显示轨迹(nav_msgs/Path消息的使用)_nav_msgs/path.h_火星机器人life的博客-CSDN博客
默认代码的画圆速度很慢,改变ROS周期可以调整 //ros::Rate loop_rate(100);
二、显示GNSS/INS轨迹
在接收到GNSS/INS位置和姿态信息后,由回调函数绘制轨迹path

2.1代码show_path.cpp
订阅GNSS/INS位置姿态信息,发布运动轨迹path
#include <ros/ros.h>
#include <ros/console.h>
#include <nav_msgs/Path.h>
#include <nav_msgs/Odometry.h>
#include <sensor_msgs/NavSatFix.h>
#include <std_msgs/String.h>
#include <geometry_msgs/Quaternion.h>
#include <geometry_msgs/PoseStamped.h>
#include <tf/transform_broadcaster.h>
#include <tf/tf.h>
#include "eul2qua.h"
#include "lla2utm.h"
nav_msgs::Path path;
ros::Publisher path_pub;
void odomCallback(const geometry_msgs::PoseStampedConstPtr& odom)
{
geometry_msgs::PoseStamped this_pose_stamped;
double pre_longitude = 116.17487972 , pre_latitude = 40.13351039 , pre_height = 37.43;
double LL2UTM_E0 = LonLat2UTM(pre_longitude, pre_latitude).first;
double LL2UTM_N0 = LonLat2UTM(pre_longitude, pre_latitude).second;
// cout << "original: "<< LL2UTM_E0 << endl;
// cout << "original: "<< LL2UTM_N0 << endl;
double new_longitude = odom->pose.position.x;
double new_latitude = odom->pose.position.y;
double LL2UTM_E_new = LonLat2UTM(new_longitude, new_latitude).first;
double LL2UTM_N_new = LonLat2UTM(new_longitude, new_latitude).second;
this_pose_stamped.pose.position.x = LL2UTM_E_new - LL2UTM_E0;
this_pose_stamped.pose.position.y = LL2UTM_N_new - LL2UTM_N0;
this_pose_stamped.pose.position.z = odom->pose.position.z - pre_height;
this_pose_stamped.pose.orientation = odom -> pose.orientation;
this_pose_stamped.header.stamp = ros::Time::now();
this_pose_stamped.header.frame_id = "map";
path.poses.push_back(this_pose_stamped);
path.header.stamp = ros::Time::now();
path.header.frame_id = "map";
path_pub.publish(path);
cout << "odom: "<<this_pose_stamped.pose.position.x << " " << this_pose_stamped.pose.position.y << " " << this_pose_stamped.pose.position.z << endl;
}
int main (int argc, char **argv)
{
ros::init (argc, argv, "showpath");
ros::NodeHandle ph;
path_pub = ph.advertise<nav_msgs::Path>("trajectory_odom", 10, true);
ros::Subscriber odomSub = ph.subscribe<geometry_msgs::PoseStamped>("/lla_qua", 10, odomCallback); //订阅里程计话题信息
ros::spin();
return 0;
}2.2CMakeLists.txt
cmake_minimum_required(VERSION 3.0.2)
project(show_path)
set(CMAKE_CXX_FLAGS "-std=c++11")
set(CMAKE_CXX_STANDARD 14)
find_package(catkin REQUIRED COMPONENTS
nav_msgs
roscpp
rospy
# sensor_msgs
std_msgs
# tf
)
find_package(Eigen3 REQUIRED)
find_package(PCL REQUIRED)
catkin_package(
CATKIN_DEPENDS roscpp std_msgs
DEPENDS EIGEN3 PCL
INCLUDE_DIRS include
)
include_directories(
include
${catkin_INCLUDE_DIRS}
${PCL_INCLUDE_DIRS}
)
aux_source_directory(./src SRCS)
add_executable(show_path ${SRCS})
target_link_libraries(show_path ${catkin_LIBRARIES})
2.3显示效果
速度为0.5m/s的车运动80s的轨迹



















 1678
1678

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











