







5.通讯协议小课堂-I2C通信
写在前面
- 当前平台文章汇总地址:ROS2机器人从入门到实战
- 获取完整教程及配套资料代码,请关注公众号<鱼香ROS>获取
- 教程配套机器人开发平台:两驱版| 四驱版
- 为方便交流,搭建了机器人技术问答社区:地址 fishros.org.cn
你好,我是爱吃鱼香ROS的小鱼。本节主要介绍I2C协议,并将其主要特点拎出来和大家说说。
网上关于I2C协议介绍的有很多,但大都非常细致,将高低电平数据协议等等都介绍了,但新手学习时不用关注那么多底层的东西,比起了解通信原理,了解它是什么,怎么用对我们更加重要。
一、I2C是一种总线通讯协议
和之前我们介绍的串口通信类似,I2C也是一种通信协议。但它是一种总线通讯协议,也就是说,一个I2C可以连接多个设备,物理连接上像这样。
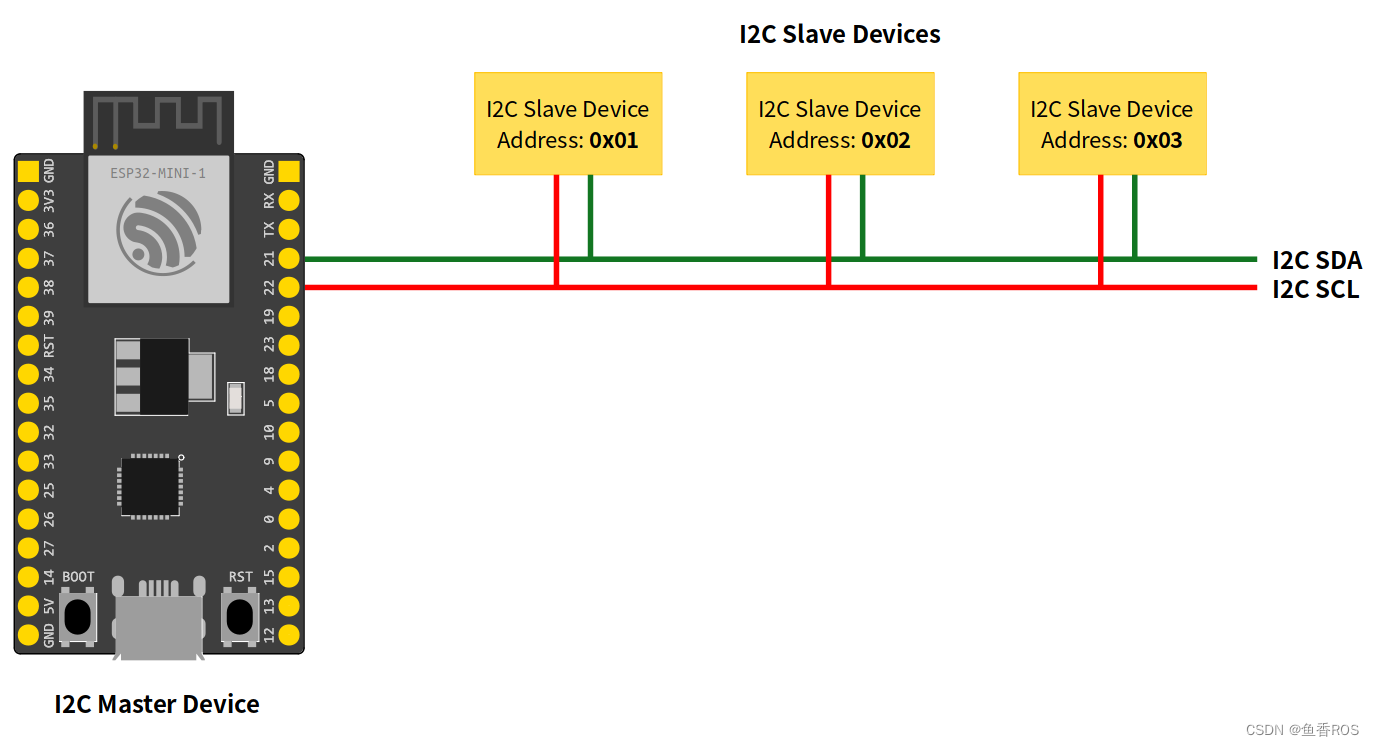
那它串的设备数量有没有上限呢?有的,上限是127个。
那为什么我们都是用18和19来驱动OLED和MPU6050呢?原因很简单,他们都是连在同一跟线上。
上原理图
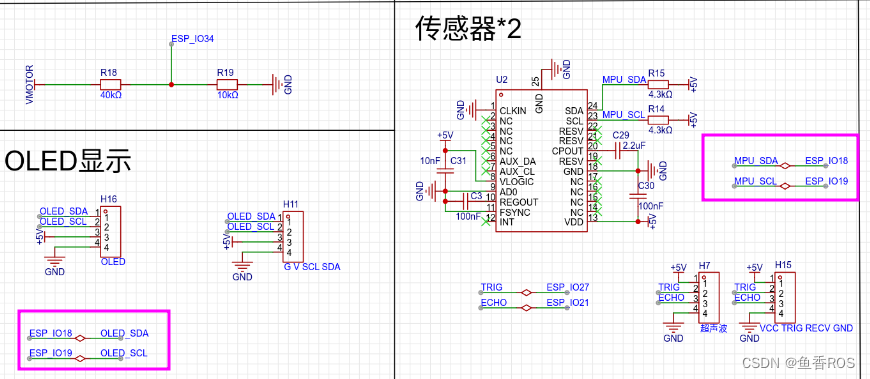
像ESP32这种引脚资源匮乏的单片机,引脚的复用就显得很重要了,这里我们就将OLED和MPU6050都接在同一个I2C上,减少引脚占用。
二、I2C是一种两线协议
在上几节我们驱动OLED和IMU的时候,都导入了"Wire.h",这个就是Arudino提供的好的头文件。我们使用的Wire的定义如下
TwoWire Wire = TwoWire(0);
TwoWire也就是两线的意思,两线也就是一个是SCL,一个是SDA
SCL即时钟线,以一个固定的周期进行电平变换,SDA即数据线,用于数据的传输,这样说有些抽象,小鱼用逻辑分析仪截取了一段OLED初始化时的SCl(GPIO18)和SDA(GPIO19)上的电平变化,并分析出其对应的数据。

再放大一些看
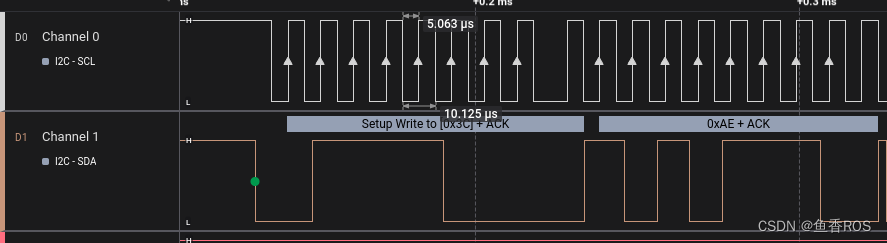
可以直观的看到SCL在数据传输开始前一直保持高电平,SDA变成了低电平,这意为着数据传输的开始,也就是那个绿点的地方。
根据I2C协议规定:SCL处于高电平时,SDA由高到低变化,这种信号是起始信号。
继续观察,你会发现,在传输过程中SCL引脚电平在以一个固定的周期来回跳变,从机这边当检测到SCL电平跳变后就开始读取SDA上的的电平,高记为1,低记为0。所以你可以看到逻辑分析仪检测到八个上升箭头,一共传输了八位数据,这八位数据用16进制表示就是0X3C。
0X3C是什么,就是我们OLED的设备地址,所以这段信号的意思就是,我接下来要给0X3C的设备发数据了,请编号为0X3C的设备准备接收。
这个信号会被0X3C的设备接收和处理,而同一总线上ID非0X3C的接收到数据后就会将其扔掉,这就是I2C支持多个设备的核心原因。
在我们的开发板上,OLED的默认地址为:0X3C,IMU的默认地址为:0x68
附件:OLED初始化时I2C引脚数据图
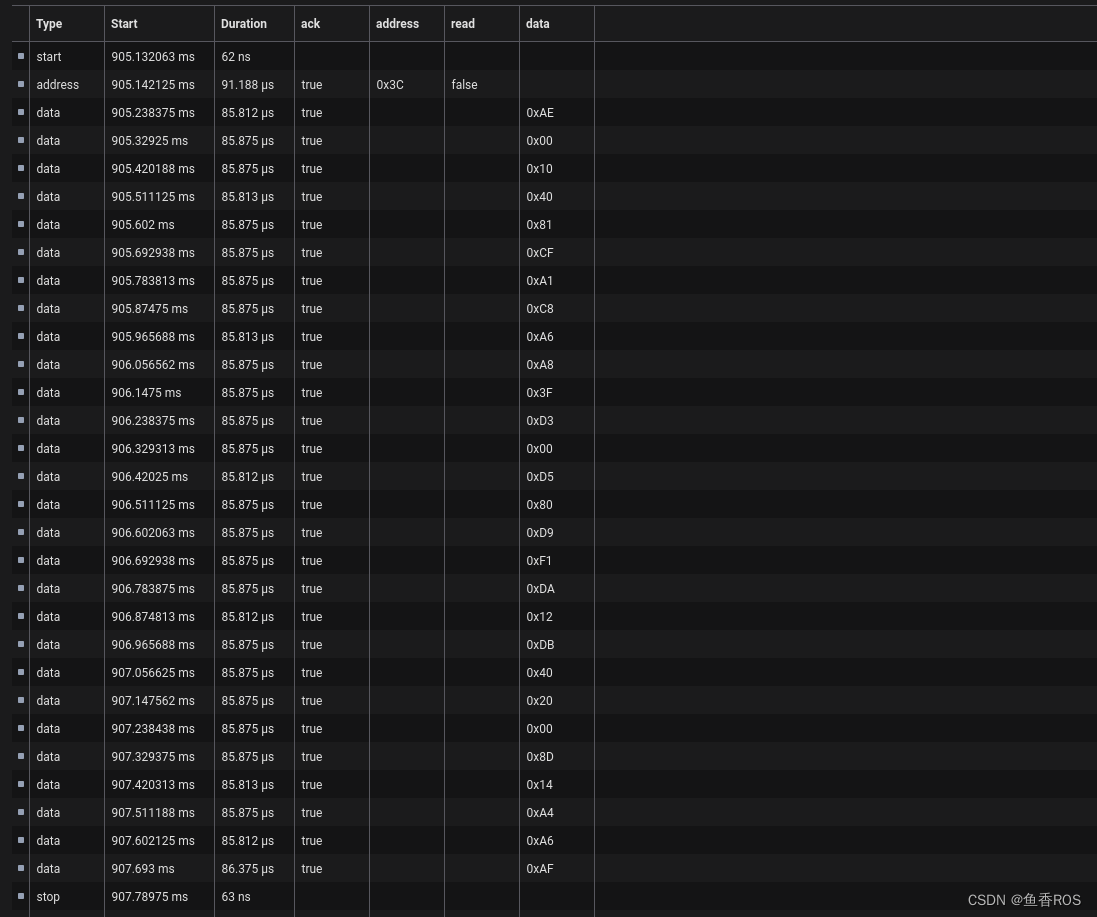
从该表可以看出,数据从905ms开始,到907ms完成了初始化数据的传输,下一节我们将按照这个数据传输内容编写代码,初始化OLED。
三、I2C是一种半双工协议
上面我们仔细分析了I2C协议,SCL用于周期的变换,SDA用于传输数据,所以同一时间,SDA要么用于接收,要么用于发送。所以我们可以得到I2C是一种半双工协议,同一时间只能进行接收或发送。
四、总结
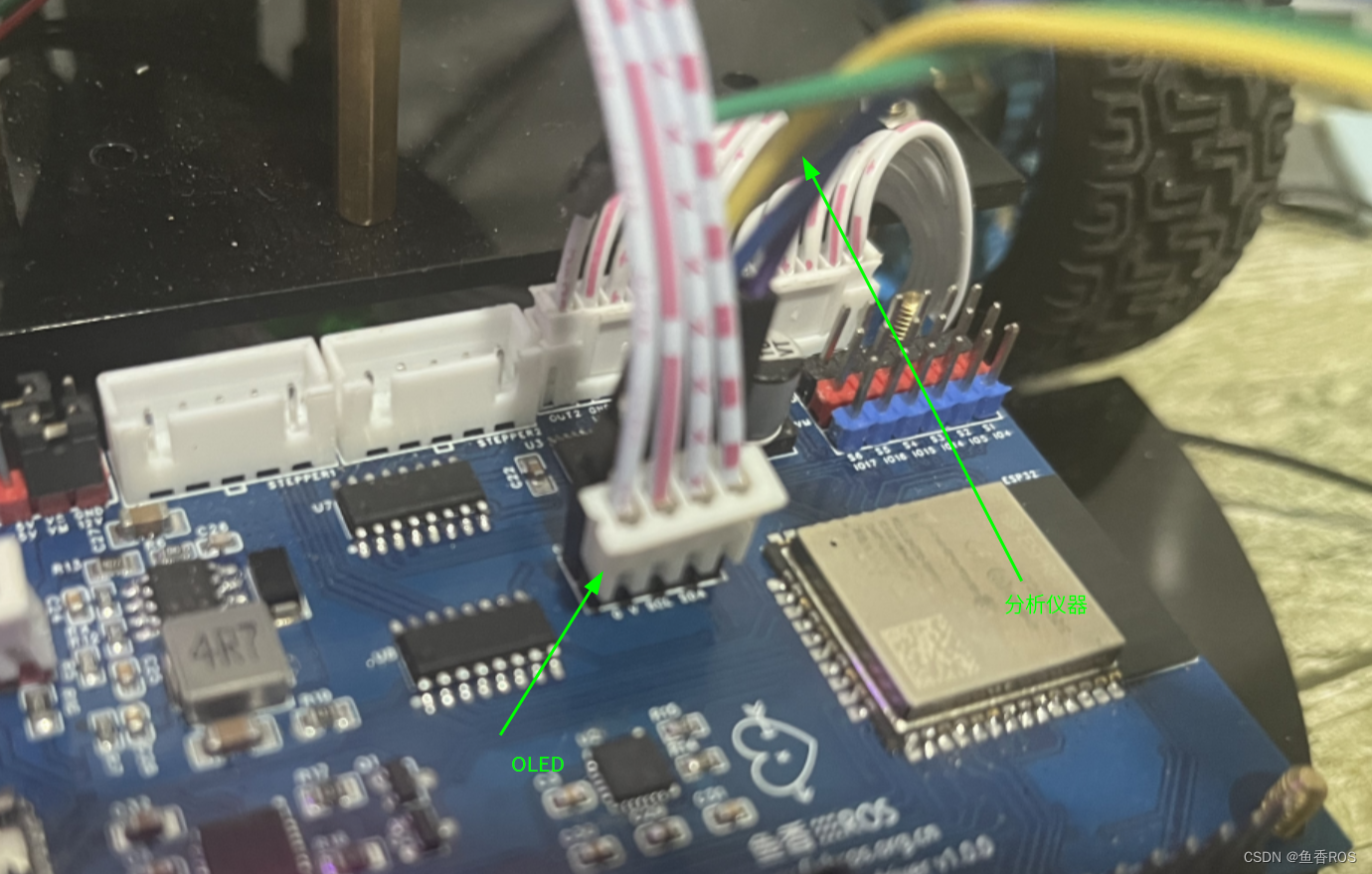
本节小鱼带你从I2C协议信号入手,详细介绍了I2C数据的特点,如果你手头也有逻辑分析工具,也可以尝试进行分析,开发板设计的时也非常人性化,你可以这样随手拿几个杜邦线就可以接入进行测量。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









