







八叉树(Octree)工作原理
八叉树的工作原理可以分为以下几个步骤:
初始划分
在八叉树的构建过程中,初始划分是第一步,具体过程如下:
-
定义根节点:
- 整个三维空间被视为一个大的立方体,这个立方体称为根节点。根节点的边界定义了八叉树的初始范围,通常由一个中心点和边长来表示。
-
确定边界:
- 根节点的边界可以通过指定其最小和最大坐标来定义。例如,可以用一个三维坐标系中的最小点(xmin, ymin, zmin)和最大点(xmax, ymax, zmax)来表示这个立方体。
-
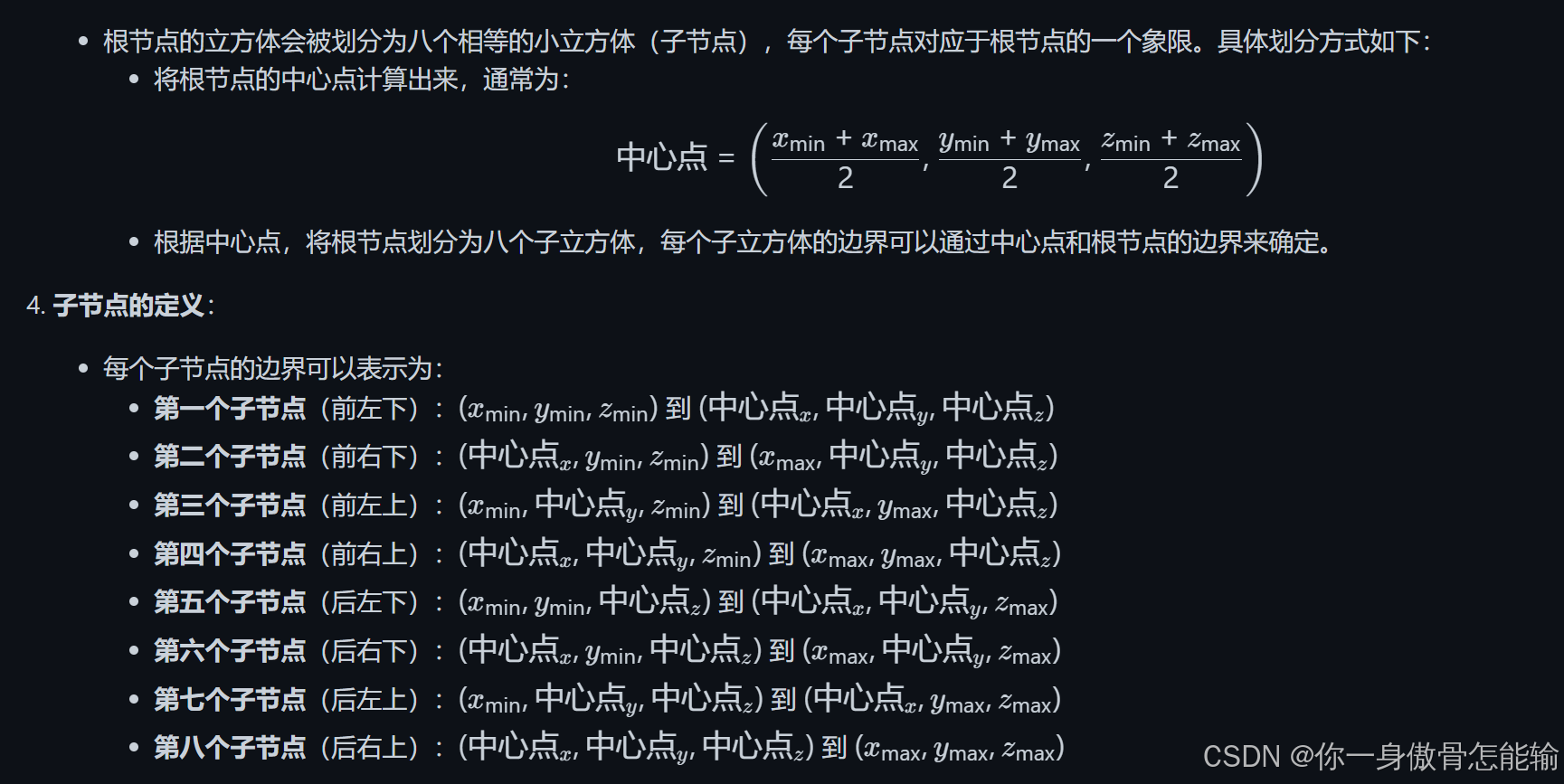
空间划分:
-
准备插入物体:
- 一旦根节点和其子节点被定义,八叉树就准备好接收物体的插入。每当一个物体被添加时,算法会根据物体的位置确定它应该插入到哪个子节点中。
总结
初始划分是八叉树构建的基础,通过将整个三维空间划分为一个大的立方体(根节点)并进一步细分为八个子立方体,八叉树为后续的物体插入、查询和碰撞检测奠定了结构基础。
物体插入
在八叉树中,物体插入的过程是关键的一步,具体步骤如下:
-
确定物体位置:
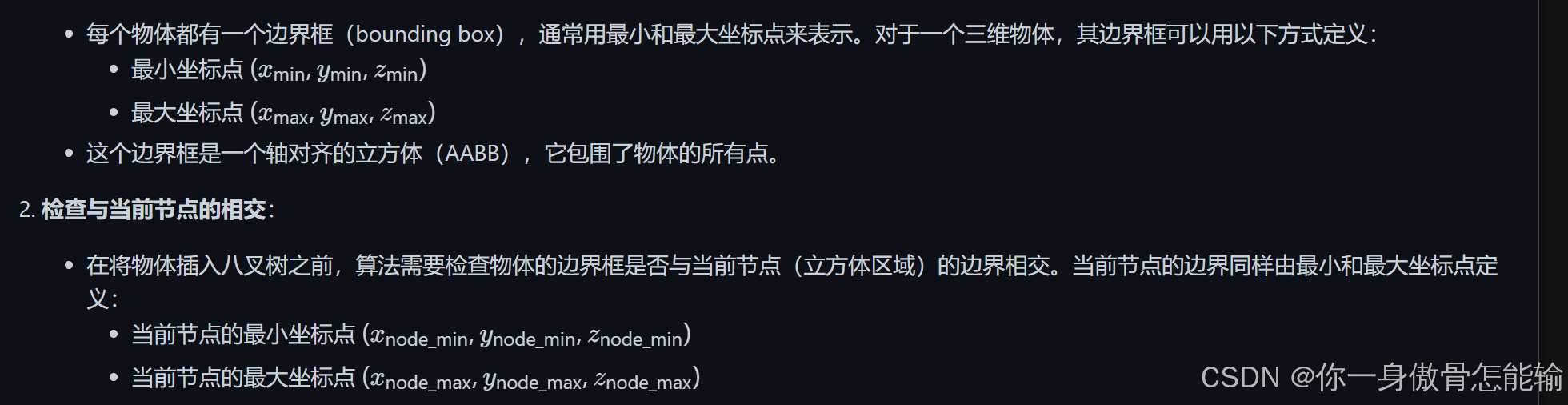
- 当一个物体被添加到八叉树时,首先需要确定该物体的边界框(bounding box),通常由物体的最小和最大坐标点定义。
- 接着,算法会检查物体的边界框与当前节点(立方体区域)的边界是否相交。如果相交,则该物体可以被插入到该节点中。
-
插入物体:
- 如果当前节点(立方体区域)内的物体数量未超过预设的阈值(例如,最大物体数),则直接将物体添加到该节点的物体列表中。
-
检查阈值:
- 如果当前节点内的物体数量超过了预设的阈值,算法将需要对该节点进行进一步的划分。此时,当前节点会被划分为八个子节点(子立方体)。
-
划分子节点:
- 划分过程与初始划分相似,首先计算当前节点的中心点,然后根据中心点将当前节点划分为八个相等的小立方体。每个子节点的边界由当前节点的边界和中心点确定。
-
重新分配物体:
- 在划分完成后,当前节点内的所有物体需要被重新分配到相应的子节点中。对于每个物体,算法会检查其边界框与每个子节点的边界是否相交,并将物体插入到相应的子节点中。
-
递归插入:
- 对于每个子节点,算法会重复上述步骤,继续检查物体数量和阈值,直到所有物体都被成功插入到合适的节点中。
总结
物体插入过程确保了八叉树能够动态适应物体的分布和数量变化。通过有效地管理物体的插入,八叉树能够保持高效的空间划分,从而在后续的查询和碰撞检测中提供快速的响应。这个过程的递归特性使得八叉树能够处理复杂的三维场景,适应不同规模的物体集合。
递归划分
在八叉树的构建和物体插入过程中,递归划分是一个重要的步骤。以下是递归划分的详细过程:
-
子区域的划分:
- 当一个节点(立方体区域)内的物体数量超过预设的阈值时,该节点会被划分为八个子区域(子立方体)。每个子区域的边界由当前节点的中心点和边界定义。
-
递归条件:
- 对于每个新创建的子区域,算法会检查以下条件以决定是否继续进行划分:
- 最小区域大小:如果子区域的边长小于某个预设的最小值,则不再进行划分。
- 物体数量:如果子区域内的物体数量低于预设的阈值,则不再进行划分。
- 对于每个新创建的子区域,算法会检查以下条件以决定是否继续进行划分:
-
继续划分:
- 如果子区域满足继续划分的条件,算法将对每个子区域重复上述划分过程。具体步骤如下:
- 计算子区域的中心点。
- 将子区域划分为八个更小的子区域。
- 检查每个新子区域内的物体数量,并决定是否继续划分。
- 如果子区域满足继续划分的条件,算法将对每个子区域重复上述划分过程。具体步骤如下:
-
物体的重新分配:
- 在每次划分后,算法需要将当前节点内的物体重新分配到相应的子区域。对于每个物体,检查其边界框与每个子区域的边界是否相交,并将物体插入到相应的子区域中。
-
递归终止:
- 递归划分会持续进行,直到所有子区域都满足停止划分的条件。此时,八叉树的结构就会稳定下来,能够有效地管理和查询物体。
示例
假设我们有一个立方体区域,初始时包含10个物体,阈值设定为5。以下是递归划分的示例过程:
- 初始节点:包含10个物体,超过阈值,进行划分。
- 划分为8个子区域:每个子区域可能包含不同数量的物体。
- 检查子区域:
- 子区域A:包含3个物体,低于阈值,不再划分。
- 子区域B:包含6个物体,超过阈值,继续划分。
- 对子区域B进行划分:划分为8个更小的子区域。
- 继续检查:对子区域B的每个子区域进行物体数量检查,决定是否继续划分。
总结
递归划分是八叉树的核心机制之一,通过不断细分空间,八叉树能够有效地管理和组织三维空间中的物体。通过设定合理的划分条件,八叉树能够在保持高效查询性能的同时,适应动态变化的场景。
碰撞检测
在八叉树中,碰撞检测是一个高效的过程,主要得益于其空间划分的特性。以下是碰撞检测的详细步骤和原理:
-
区域划分的优势:
- 八叉树将三维空间划分为多个层次的立方体区域。每个区域内的物体数量相对较少,这使得在进行碰撞检测时,只需关注同一区域内的物体,而不必检查整个场景中的所有物体。
-
碰撞检测的步骤:
- 确定物体位置:首先,确定需要进行碰撞检测的物体的边界框(bounding box)。
- 查找相关区域:根据物体的位置,找到其所在的八叉树节点(立方体区域)。如果物体的边界框与某个节点相交,则该节点内的物体可能与目标物体发生碰撞。
- 递归检查:从根节点开始,递归地检查每个子节点,直到达到叶子节点(没有进一步划分的节点)。在每个节点中,检查该节点内的所有物体。
-
物体间的碰撞检测:
- 在每个叶子节点中,算法会对该节点内的所有物体进行碰撞检测。常用的碰撞检测算法包括:
- 轴对齐包围盒(AABB):检查两个物体的边界框是否相交。
- 球体碰撞检测:使用球体的半径和中心点进行简单的距离计算。
- 多边形/网格碰撞检测:对于复杂的物体,可能需要更精确的碰撞检测算法。
- 在每个叶子节点中,算法会对该节点内的所有物体进行碰撞检测。常用的碰撞检测算法包括:
-
减少计算量:
- 由于只检查同一区域内的物体,碰撞检测的计算量显著减少。例如,如果一个场景中有1000个物体,使用八叉树后,可能只需检查每个叶子节点内的10个物体,而不是检查所有1000个物体。
-
动态场景处理:
- 在动态场景中,物体可能会移动。此时,算法需要定期更新八叉树的结构,确保物体在正确的区域中。可以在物体移动时重新插入物体,或者在物体离开当前区域时将其移除并重新插入。
总结
通过利用八叉树的空间划分特性,碰撞检测过程变得更加高效。只需关注同一区域内的物体,显著减少了需要检测的物体数量,从而提高了性能。这种方法特别适合于处理复杂的三维场景,能够在实时应用(如游戏和仿真)中提供快速的碰撞检测能力。
确定物体位置
在八叉树中,确定物体位置是物体插入和碰撞检测的关键步骤。以下是这一过程的详细说明:
-
定义边界框:
-
相交检测算法:
-
插入物体:
- 如果物体的边界框与当前节点相交,则可以将物体插入到该节点的物体列表中。如果当前节点的物体数量超过预设的阈值,则需要进一步划分该节点为八个子节点,并将物体重新分配到相应的子节点中。
总结
确定物体位置的过程是八叉树管理物体的基础。通过定义物体的边界框并检查其与当前节点的相交情况,算法能够有效地决定物体是否可以插入到八叉树中。这一过程不仅适用于物体的插入,也为后续的碰撞检测提供了基础,确保只检查可能相交的物体,从而提高了效率。
在八叉树中,确定物体位置检查与当前节点的相交的话,不是说明当前节点(立方体区域)已经放不下游戏物体了吗,为什么还可以把当前物体划分到当前区域中去
在八叉树中,确定物体位置时的相交检查并不意味着当前节点无法容纳物体,而是用于判断物体是否与当前节点的空间相交。以下是更详细的解释:
1. 相交检查的目的
相交检查的主要目的是确定物体的边界框是否与当前节点的边界相交。这是为了确保物体在空间中的位置与八叉树的结构相匹配。具体来说:
- 相交:如果物体的边界框与当前节点的边界相交,说明该物体在当前节点的空间范围内,可能需要被插入到该节点中。
- 不相交:如果物体的边界框与当前节点的边界不相交,则该物体不在当前节点的空间内,不能插入到该节点中。
2. 当前节点的物体数量
在八叉树中,每个节点都有一个物体数量的阈值。当一个节点的物体数量超过这个阈值时,才会进行划分。相交检查并不直接与节点的物体数量相关,而是用于判断物体是否可以被插入到该节点中。
3. 插入过程
当一个物体的边界框与当前节点相交时,插入过程通常遵循以下步骤:
- 检查相交:首先,检查物体的边界框是否与当前节点相交。
- 插入物体:如果相交,尝试将物体插入到当前节点的物体列表中。
- 物体数量检查:在插入后,检查当前节点的物体数量是否超过阈值。
- 如果未超过阈值:物体可以继续留在当前节点。
- 如果超过阈值:需要将当前节点划分为八个子节点,并将当前节点内的所有物体(包括新插入的物体)重新分配到相应的子节点中。
4. 递归划分
在划分过程中,算法会递归地检查每个子节点,直到满足停止划分的条件(如物体数量低于阈值或达到最小区域大小)。这确保了八叉树的结构能够适应动态变化的场景。
总结
在八叉树中,物体的相交检查是为了确保物体在空间中的位置与八叉树的结构相匹配。即使当前节点的物体数量可能会导致划分,但只要物体的边界框与当前节点相交,就可以将物体插入到该节点中,并在必要时进行后续的划分和重新分配。这种设计使得八叉树能够有效地管理和组织三维空间中的物体。
在八叉树中,如何检测游戏物体之间的碰撞
在八叉树中检测游戏物体之间的碰撞通常涉及以下几个步骤。八叉树的结构使得碰撞检测更加高效,因为它能够快速排除不可能相交的物体。以下是详细的步骤:
1. 构建八叉树
在进行碰撞检测之前,首先需要构建八叉树。这个过程通常包括:
- 初始化八叉树:创建一个根节点,定义其空间范围。
- 插入物体:将所有游戏物体的边界框插入到八叉树中。插入时,使用相交检查来确定物体是否适合当前节点,并在必要时进行节点的划分。
2. 碰撞检测过程
一旦八叉树构建完成,可以进行碰撞检测。碰撞检测的步骤如下:
2.1. 查询可能的碰撞对
在八叉树中查询可能的碰撞对是一个重要的步骤,它通过有效地利用树的结构来减少需要进行精确碰撞检测的物体数量。以下是详细的步骤和实现方法:
查询可能的碰撞对的步骤
1. 从根节点开始
- 初始化查询:选择一个需要检测碰撞的物体(通常是其边界框),并从八叉树的根节点开始进行查询。
- 边界框相交检查:检查该物体的边界框(通常是轴对齐包围盒,AABB)是否与当前节点的边界框相交。
2. 递归遍历
-
相交的情况:
- 如果物体的边界框与当前节点的边界框相交,则继续检查该节点的所有子节点。
- 对于每个子节点,重复相同的相交检查过程。
-
不相交的情况:
- 如果物体的边界框与当前节点的边界框不相交,则可以直接返回,不需要进一步检查该节点的子节点。
3. 收集候选物体
- 物体列表:在遍历过程中,维护一个候选物体列表,用于存储所有与查询物体相交的物体。
- 添加物体:当检测到某个子节点的物体与查询物体的边界框相交时,将该物体添加到候选物体列表中。
示例代码
以下是一个简单的伪代码示例,展示如何在八叉树中查询可能的碰撞对:
function queryPotentialCollisions(node, queryObject, candidateList):
// 检查当前节点是否为空
if node is null:
return
// 检查当前节点的边界框是否与查询物体相交
if not intersects(node.boundingBox, queryObject.boundingBox):
return // 不相交,返回
// 如果相交,遍历当前节点的物体列表
for each object in node.objects:
if intersects(object.boundingBox, queryObject.boundingBox):
candidateList.add(object) // 添加到候选物体列表
// 递归检查子节点
for each childNode in node.children:
queryPotentialCollisions(childNode, queryObject, candidateList)
4. 处理候选物体
- 精确碰撞检测:一旦收集到候选物体列表,可以对这些物体进行精确的碰撞检测,使用适当的碰撞检测算法(如AABB、OBB、球体等)来判断是否真的发生了碰撞。
5. 性能优化
- 减少不必要的检查:通过八叉树的结构,能够有效地减少需要进行精确碰撞检测的物体对,从而提高性能。
- 动态更新:在物体移动时,及时更新八叉树,确保查询的准确性。
总结
通过从八叉树的根节点开始递归遍历,检查物体的边界框与节点的边界框是否相交,可以有效地收集可能发生碰撞的候选物体。这种方法利用了八叉树的空间分割特性,显著提高了碰撞检测的效率。
2.2. 进行精确的碰撞检测
在进行精确的碰撞检测时,针对收集到的候选物体,通常会使用不同的碰撞检测算法来判断物体之间是否发生了碰撞。以下是一些常用的碰撞检测算法及其实现方法:
1. 逐对检查
对于候选物体列表中的每一对物体,进行逐对的精确碰撞检测。可以使用以下几种常见的碰撞检测算法:
2. 碰撞算法
2.1. 轴对齐包围盒(AABB)
AABB是最简单的碰撞检测方法之一,适用于未旋转的物体。AABB的碰撞检测可以通过检查两个AABB的边界是否重叠来实现。
AABB相交检测伪代码:
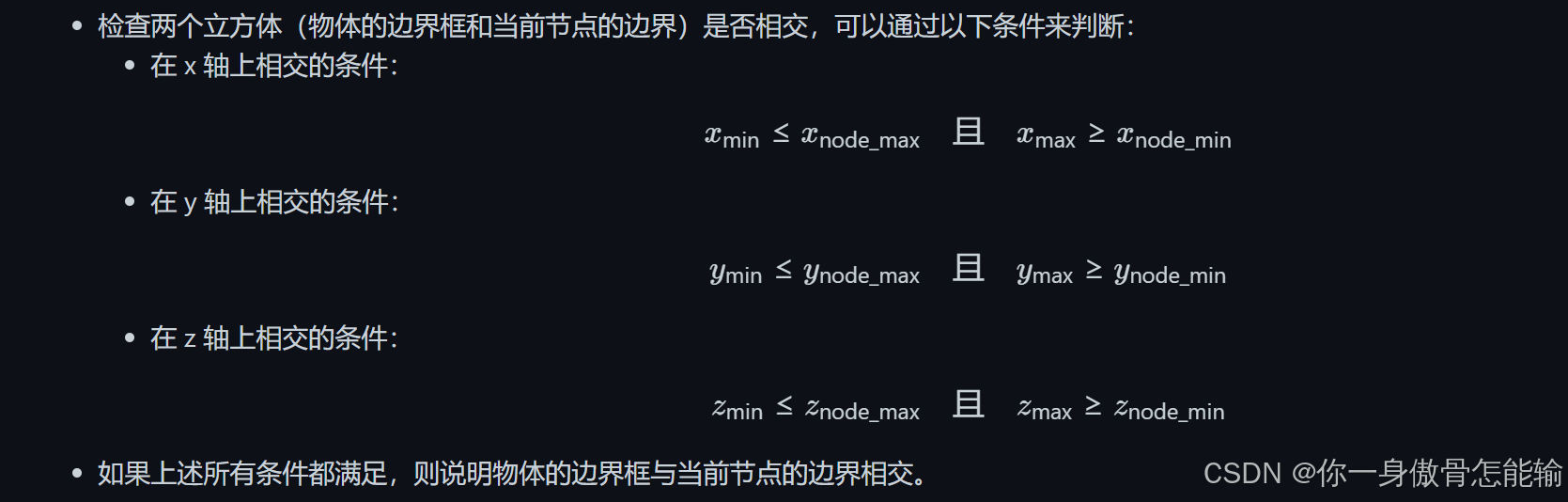
function AABBIntersect(aabb1, aabb2):
return (aabb1.minX <= aabb2.maxX and aabb1.maxX >= aabb2.minX) and
(aabb1.minY <= aabb2.maxY and aabb1.maxY >= aabb2.minY) and
(aabb1.minZ <= aabb2.maxZ and aabb1.maxZ >= aabb2.minZ)
2.2. 有向包围盒(OBB)
OBB适用于旋转物体的碰撞检测。OBB的碰撞检测相对复杂,通常使用分离轴定理(SAT)来判断两个OBB是否相交。
OBB相交检测伪代码:
function OBBIntersect(obb1, obb2):
// 计算OBB的轴
axes = getAxes(obb1) + getAxes(obb2)
for each axis in axes:
// 投影到轴上
projection1 = project(obb1, axis)
projection2 = project(obb2, axis)
// 检查投影是否重叠
if not overlap(projection1, projection2):
return false // 不相交
return true // 相交
2.3. 球体碰撞
球体碰撞检测相对简单,只需检查两个球体之间的距离是否小于它们的半径之和。
球体相交检测伪代码:
function SphereIntersect(sphere1, sphere2):
distance = length(sphere1.center - sphere2.center)
return distance < (sphere1.radius + sphere2.radius)
3. 处理碰撞结果
一旦检测到碰撞,可以根据游戏的需求处理碰撞结果,例如:
- 触发事件:如角色受伤、物体破坏等。
- 更新物体状态:如反弹、停止移动等。
4. 性能优化
- 早期退出:在逐对检查中,如果发现某一对物体不相交,可以立即退出,不必继续检查后续的碰撞。
- 分层检测:可以先使用简单的碰撞检测(如AABB)快速排除不相交的物体,然后再对可能相交的物体进行更复杂的检测(如OBB或球体)。
总结
精确的碰撞检测是游戏物理引擎中的关键部分。通过逐对检查候选物体,并使用适当的碰撞检测算法(如AABB、OBB和球体),可以有效地判断物体之间的碰撞。根据物体的形状和需求选择合适的算法,可以提高碰撞检测的效率和准确性。
3. 处理碰撞结果
处理碰撞结果是游戏物理引擎中的重要环节,涉及到如何根据检测到的碰撞来更新游戏状态和物体行为。以下是一些常见的碰撞处理方法和响应策略:
1. 触发事件
当检测到碰撞时,可以触发特定的事件。这些事件可以是游戏逻辑中的重要部分,通常包括:
-
角色受伤:如果角色与敌人或障碍物发生碰撞,可以减少角色的生命值或触发受伤动画。
if collisionDetected: player.health -= damageAmount triggerPlayerHurtAnimation() -
物体破坏:如果一个可破坏的物体(如墙壁、箱子等)与其他物体发生碰撞,可以将其标记为破坏状态,并播放破坏效果。
if collisionDetected and destructibleObject: destroyObject(destructibleObject) playDestructionEffect(destructibleObject.position) -
收集物品:如果角色与可收集物品(如金币、道具等)发生碰撞,可以将物品添加到角色的库存中,并播放收集动画。
if collisionDetected and collectibleItem: player.inventory.add(collectibleItem) playCollectAnimation(collectibleItem.position)
2. 更新物体的位置或状态
碰撞检测后,通常需要根据碰撞的性质更新物体的位置或状态。常见的响应方式包括:
-
反弹:对于具有弹性的物体(如球体),可以根据碰撞法线计算反弹方向,并更新物体的速度和位置。
if collisionDetected and isElastic: normal = calculateCollisionNormal(collision) velocity = reflect(velocity, normal) updatePosition(object, velocity) -
停止移动:对于碰撞的物体,可以将其速度设置为零,或者将其位置调整到碰撞边界的外部,以避免物体穿透。
if collisionDetected: object.velocity = Vector3(0, 0, 0) // 停止移动 object.position = adjustPositionToAvoidPenetration(object, collision) -
滑动:对于某些物体(如角色),可以实现滑动效果,使其在碰撞表面上滑动,而不是完全停止。
if collisionDetected and canSlide: slideDirection = calculateSlideDirection(collision) updatePosition(object, slideDirection)
3. 物理属性的更新
在处理碰撞时,还可以更新物体的物理属性,例如:
-
摩擦力:根据碰撞表面的摩擦力调整物体的速度。
if collisionDetected: object.velocity *= (1 - frictionCoefficient) -
重力影响:在碰撞后,可能需要重新计算物体的重力影响,特别是在平台游戏中。
if collisionDetected: object.isGrounded = true object.velocity.y = 0 // 重置垂直速度
4. 反馈与视觉效果
-
视觉效果:在发生碰撞时,可以播放特效(如火花、烟雾等)来增强游戏的视觉体验。
if collisionDetected: playCollisionEffect(collision.position) -
声音效果:播放碰撞音效,以增强游戏的沉浸感。
if collisionDetected: playSoundEffect("collisionSound")
总结
处理碰撞结果是游戏开发中的关键环节,涉及到触发事件、更新物体状态、调整物理属性以及提供反馈等多个方面。根据游戏的需求和设计,合理地实现这些响应机制,可以提升游戏的互动性和玩家体验。
4. 性能优化
在游戏开发中,性能优化是确保流畅体验的关键,尤其是在处理碰撞检测和物体管理时。以下是一些关于动态更新八叉树和剔除不必要检查的优化策略:
1. 动态更新八叉树
1.1. 物体移动时的更新
-
位置检查:在每一帧更新中,检查物体的位置是否发生变化。如果物体的边界框与其所在的八叉树节点的边界框不再相交,则需要将其从当前节点移除并重新插入到合适的节点中。
function updateObjectPosition(object): if not isInCurrentNode(object): removeFromCurrentNode(object) insertIntoOctree(object) -
阈值判断:为了避免频繁的更新,可以设置一个阈值,只有当物体移动超过一定距离时才进行更新。这可以减少不必要的计算。
if distanceMoved > threshold: updateObjectPosition(object)
1.2. 定期重建八叉树
-
重建策略:在某些情况下,尤其是当场景中的物体数量发生显著变化时,可以选择定期重建整个八叉树。这可以在游戏的特定时刻(如关卡切换)或在物体数量超过某个阈值时进行。
function rebuildOctree(): clearOctree() for each object in scene: insertIntoOctree(object)
2. 剔除不必要的检查
2.1. 使用八叉树进行初步筛选
-
层次化碰撞检测:在进行精确碰撞检测之前,首先使用八叉树进行初步筛选。只有在八叉树中相交的物体才会进行更复杂的碰撞检测。这可以显著减少需要检查的物体对数量。
function checkCollisions(): candidateList = [] queryPotentialCollisions(octree.root, queryObject, candidateList) for each object in candidateList: if preciseCollisionCheck(queryObject, object): handleCollision(queryObject, object)
2.2. 空间划分与分层
-
动态分层:根据物体的密度和活动性动态调整八叉树的层次结构。例如,在物体密集的区域使用更细的划分,而在物体稀疏的区域使用更粗的划分。
-
分区管理:将场景划分为多个区域(如网格),只对当前区域内的物体进行碰撞检测。这样可以进一步减少需要检查的物体数量。
3. 其他性能优化策略
3.1. 使用多线程
- 并行处理:在多核处理器上,可以将碰撞检测和物体更新分配到不同的线程中进行处理。这样可以充分利用硬件资源,提高性能。
3.2. 物体合并与简化
物体合并与简化是游戏开发中常用的性能优化技术,特别是在处理碰撞检测时。以下是关于如何有效地合并静态物体和简化碰撞形状的详细说明。
1. 合并静态物体
1.1. 合并的好处
- 减少计算量:将多个静态物体合并为一个大物体,可以显著减少需要进行碰撞检测的物体数量,从而提高性能。
- 简化碰撞检测:合并后的物体可以使用更简单的碰撞形状进行检测,进一步提高效率。
1.2. 合并策略
-
空间划分:在场景中识别出静态物体的区域,并将这些物体合并为一个大物体。例如,在一个建筑物内部,可以将所有墙壁和地板合并为一个整体。
function mergeStaticObjects(staticObjects): mergedObject = createMergedObject() for each object in staticObjects: addToMergedObject(mergedObject, object) return mergedObject -
合并条件:设定合并的条件,例如物体之间的距离、重叠程度等。只有在满足条件的情况下,才进行合并。
-
动态更新:在游戏运行过程中,如果某个静态物体变为动态物体(如被破坏或移动),需要将其从合并的物体中分离出来。
2. 简化碰撞形状
2.1. 简化的好处
- 提高性能:使用简单的碰撞形状(如球体、轴对齐包围盒 AABB)进行初步碰撞检测,可以显著减少计算复杂度。
- 分层检测:通过分层检测,只有在初步检测到碰撞时,才进行更复杂的碰撞检测(如有向包围盒 OBB)。
2.2. 简化策略
-
选择合适的形状:根据物体的形状和运动特性选择合适的简化碰撞形状。例如,对于球形物体,可以使用球体碰撞形状;对于长方体物体,可以使用 AABB。
function createSimpleCollisionShape(object): if object.isSphere: return createSphereShape(object.radius) else: return createAABBShape(object.boundingBox) -
初步检测:在进行碰撞检测时,首先使用简化的碰撞形状进行检测。如果检测到碰撞,再使用更复杂的形状进行精确检测。
function checkCollision(objectA, objectB): simpleShapeA = createSimpleCollisionShape(objectA) simpleShapeB = createSimpleCollisionShape(objectB) if simpleCollisionCheck(simpleShapeA, simpleShapeB): return preciseCollisionCheck(objectA, objectB) return false -
动态调整:根据物体的状态和环境动态调整碰撞形状。例如,当物体静止时,可以使用更简单的形状;当物体移动时,可以使用更复杂的形状。
3. 实现示例
以下是一个简单的示例,展示如何合并静态物体并使用简化碰撞形状进行碰撞检测:
class GameObject:
def __init__(self, position, isStatic):
self.position = position
self.isStatic = isStatic
self.boundingBox = calculateBoundingBox()
def mergeStaticObjects(staticObjects):
mergedObject = GameObject(position=(0, 0, 0), isStatic=True)
for obj in staticObjects:
mergedObject.boundingBox = mergeBoundingBoxes(mergedObject.boundingBox, obj.boundingBox)
return mergedObject
def checkCollision(objectA, objectB):
simpleShapeA = createSimpleCollisionShape(objectA)
simpleShapeB = createSimpleCollisionShape(objectB)
if simpleCollisionCheck(simpleShapeA, simpleShapeB):
return preciseCollisionCheck(objectA, objectB)
return False
# 使用示例
staticObjects = [GameObject((1, 0, 0), True), GameObject((2, 0, 0), True)]
mergedStaticObject = mergeStaticObjects(staticObjects)
dynamicObject = GameObject((1.5, 0, 0), False)
collisionDetected = checkCollision(mergedStaticObject, dynamicObject)
总结
通过合并静态物体和简化碰撞形状,可以显著提高游戏的性能,尤其是在处理大量物体的场景中。以下是一些进一步的建议和最佳实践,以帮助您更好地实现这些优化策略。
3.3. 适应性更新
适应性更新是一种优化技术,旨在根据物体的重要性和活动性动态调整其更新频率。这种方法可以显著提高游戏性能,尤其是在处理大量物体时。以下是关于如何实现基于重要性更新的详细说明。
1. 适应性更新的好处
- 性能优化:通过减少不重要物体的更新频率,可以降低CPU和GPU的负担,从而提高整体性能。
- 资源管理:更有效地利用计算资源,确保重要物体获得足够的处理能力。
- 响应性提升:重要物体(如玩家角色)可以更频繁地更新,确保游戏的响应性和流畅性。
2. 重要性评估
在实现适应性更新之前,需要对场景中的物体进行重要性评估。以下是一些评估标准:
2.1. 物体类型
- 玩家角色:通常是最重要的物体,应该以最高频率更新。
- 敌人和NPC:根据其在游戏中的重要性和活动性,决定更新频率。
- 背景物体:如树木、建筑等,通常不需要频繁更新。
2.2. 物体状态
- 活动性:如果物体正在移动或与其他物体交互,则需要更频繁地更新。
- 可见性:如果物体在摄像机视野内,可能需要更频繁地更新;如果在视野外,可以减少更新频率。
2.3. 距离
- 距离摄像机的远近:距离较远的物体可以减少更新频率,而靠近摄像机的物体则需要更频繁地更新。
3. 更新策略
根据物体的重要性和活动性,可以制定不同的更新策略。以下是一些常见的策略:
3.1. 更新频率分级
- 高频更新:对于重要物体(如玩家、主要敌人),每帧更新。
- 中频更新:对于次要物体(如次要敌人、重要NPC),每隔几帧更新。
- 低频更新:对于不重要的物体(如背景物体),每隔多帧更新,甚至可以在不需要时完全不更新。
class GameObject:
def __init__(self, name, importance, isActive):
self.name = name
self.importance = importance # 1: 高, 2: 中, 3: 低
self.isActive = isActive
self.updateCounter = 0
def update(self):
# 更新物体状态
pass
def updateGameObjects(objects):
for obj in objects:
if obj.isActive:
if obj.importance == 1: # 高频更新
obj.update()
elif obj.importance == 2: # 中频更新
if obj.updateCounter % 2 == 0: # 每两帧更新一次
obj.update()
elif obj.importance == 3: # 低频更新
if obj.updateCounter % 5 == 0: # 每五帧更新一次
obj.update()
obj.updateCounter += 1
3.2. 动态调整更新频率
- 实时监测:根据物体的状态(如活动性、可见性)动态调整更新频率。例如,当物体开始移动时,可以提高其更新频率;当物体停止时,可以降低其更新频率。
def adjustUpdateFrequency(obj):
if obj.isActive and obj.isMoving:
obj.importance = 1 # 提高更新频率
elif obj.isActive and not obj.isMoving:
obj.importance = 2 # 中等更新频率
else:
obj.importance = 3 # 低更新频率
4. 实际应用示例
以下是一个完整的示例,展示如何实现基于重要性更新的逻辑:
class GameObject:
def __init__(self, name, importance, isActive):
self.name = name
self.importance = importance # 1: 高, 2: 中, 3: 低
self.isActive = isActive
self.isMoving = False
self.updateCounter = 0
def update(self):
# 更新物体状态
```python
print(f"Updating {self.name}")
def setMovement(self, isMoving):
self.isMoving = isMoving
def updateGameObjects(objects):
for obj in objects:
adjustUpdateFrequency(obj) # 动态调整更新频率
if obj.isActive:
if obj.importance == 1: # 高频更新
obj.update()
elif obj.importance == 2: # 中频更新
if obj.updateCounter % 2 == 0: # 每两帧更新一次
obj.update()
elif obj.importance == 3: # 低频更新
if obj.updateCounter % 5 == 0: # 每五帧更新一次
obj.update()
obj.updateCounter += 1
def adjustUpdateFrequency(obj):
# 根据物体的活动性动态调整更新频率
if obj.isActive and obj.isMoving:
obj.importance = 1 # 提高更新频率
elif obj.isActive and not obj.isMoving:
obj.importance = 2 # 中等更新频率
else:
obj.importance = 3 # 低更新频率
# 示例使用
gameObjects = [
GameObject("Player", 1, True), # 玩家角色
GameObject("Enemy1", 2, True), # 敌人
GameObject("BackgroundTree", 3, False), # 背景物体
]
# 模拟游戏循环
for frame in range(10): # 假设有10帧
print(f"Frame {frame}:")
# 假设玩家在第5帧开始移动
if frame == 5:
gameObjects[0].setMovement(True) # 玩家开始移动
# 更新所有物体
updateGameObjects(gameObjects)
print("-" * 20)
5. 总结
通过实现基于重要性更新的适应性更新策略,您可以有效地管理游戏中的物体更新频率,从而提高性能和响应性。以下是一些关键点:
- 重要性评估:根据物体的类型、状态和距离等因素评估其重要性。
- 更新策略:为不同重要性的物体设置不同的更新频率,确保重要物体获得足够的处理能力。
- 动态调整:实时监测物体的活动性和可见性,动态调整其更新频率,以适应游戏的变化。
这种方法不仅可以提高游戏的性能,还能确保玩家在游戏中获得更好的体验。通过合理的资源管理,您可以在复杂的场景中保持流畅的游戏体验。
通过动态更新八叉树和剔除不必要的检查,可以显著提高碰撞检测的性能。结合其他优化策略,如多线程处理、物体合并和简化碰撞形状,可以进一步提升游戏的运行效率,确保流畅的用户体验。
总结
在八叉树中检测游戏物体之间的碰撞主要通过构建八叉树、查询可能的碰撞对以及进行精确的碰撞检测来实现。八叉树的层次结构使得碰撞检测更加高效,能够快速排除不相交的物体,从而优化性能。



















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











