






 超级会员免费看
超级会员免费看
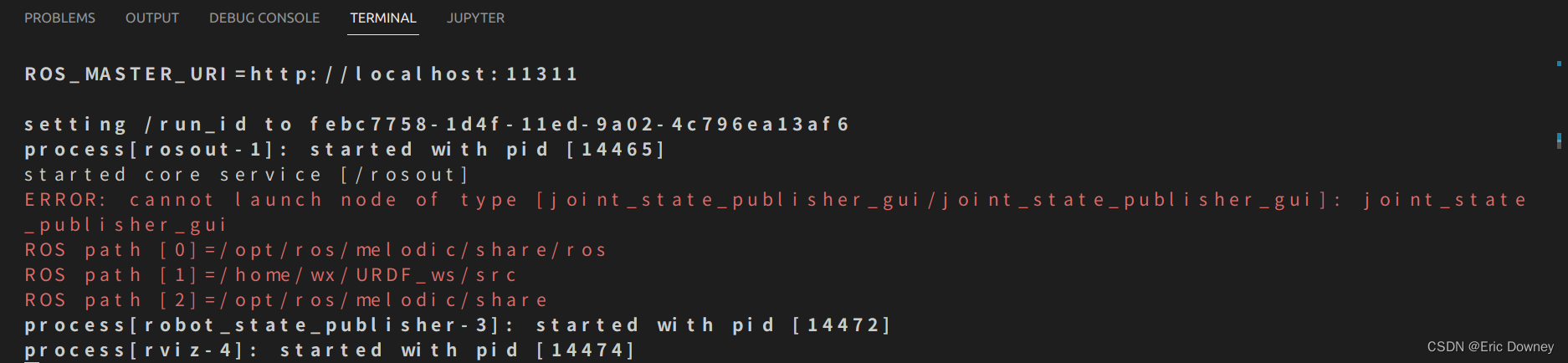
原因:未下载joint-state-publisher-gui
方法:
sudo apt-get install ros-melodic-joint-state-publisher-gui然后修改机器人的launch文件
将
joint-state-publisher
改为
joint-state-publisher-gui

原因:未下载joint-state-publisher-gui
方法:
sudo apt-get install ros-melodic-joint-state-publisher-gui然后修改机器人的launch文件
将
joint-state-publisher
改为
joint-state-publisher-gui











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言



















 602
602







