









 本文介绍了Nav2导航系统中针对阿克曼小车的运动模型和计算方法。主要内容包括根据反馈信息估算当前位置并发布odom,以及如何根据速度控制命令计算小车速度和内转角。通过阿克曼几何关系,分析了小车运动旋转中心的确定,并利用数值积分方法(如RK4)进行位置更新。同时,讨论了如何将Nav2的控制命令转化为实际的小车速度和前轮转角。
本文介绍了Nav2导航系统中针对阿克曼小车的运动模型和计算方法。主要内容包括根据反馈信息估算当前位置并发布odom,以及如何根据速度控制命令计算小车速度和内转角。通过阿克曼几何关系,分析了小车运动旋转中心的确定,并利用数值积分方法(如RK4)进行位置更新。同时,讨论了如何将Nav2的控制命令转化为实际的小车速度和前轮转角。
非汽车专业,有误之处烦请留言指正。
1 基本概念
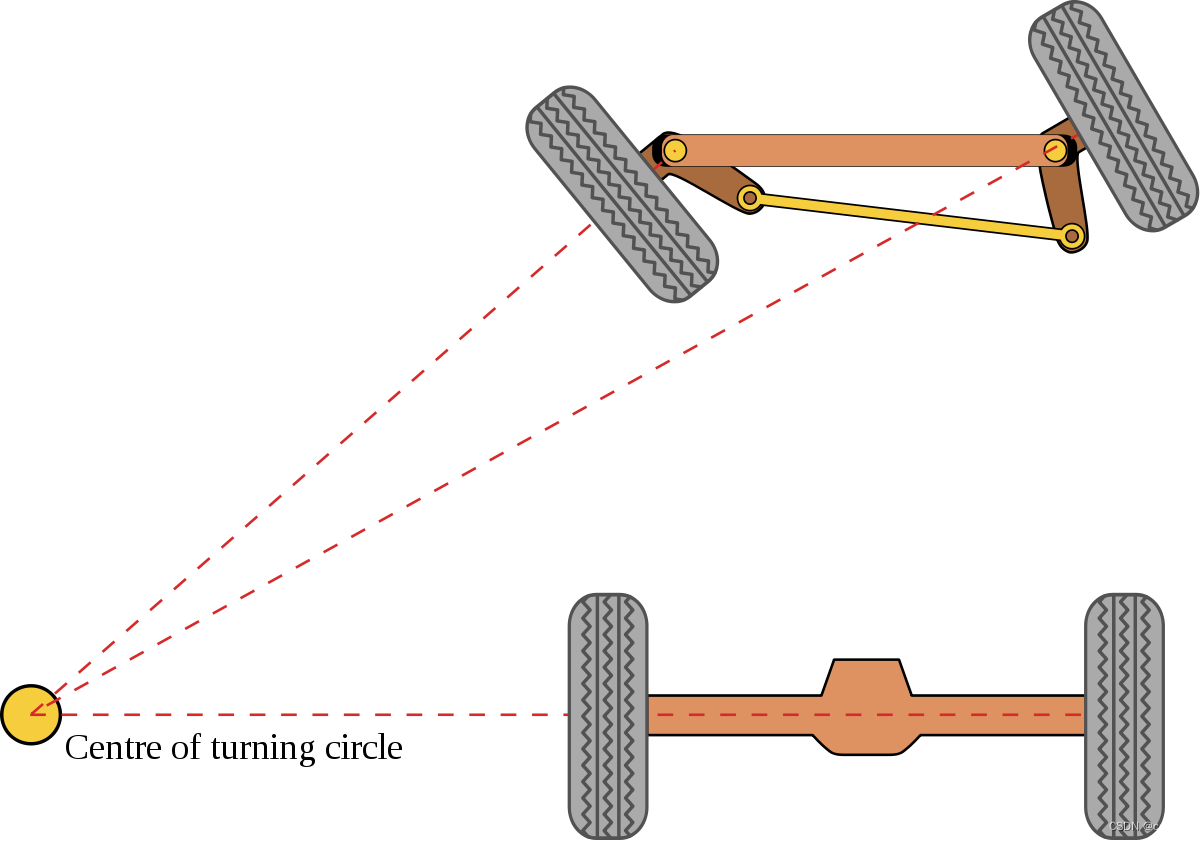
前轮转向的阿克曼小车如图:
忽略左右轮的转角差,简化为自行车模型。如图:
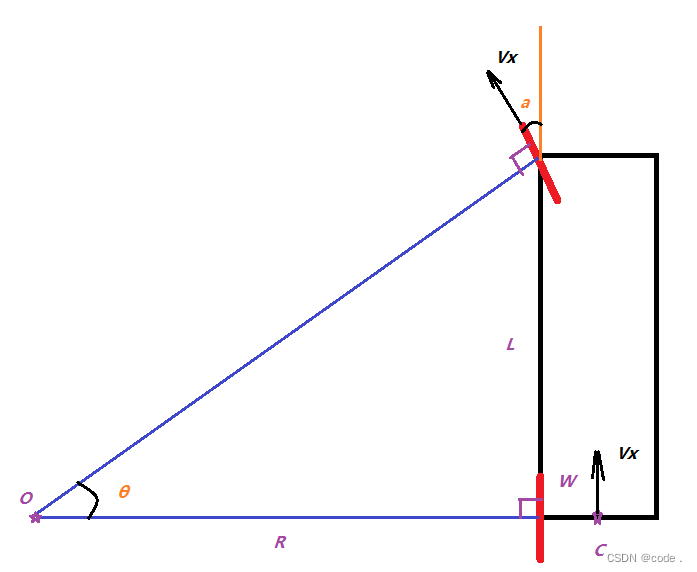
可看到:
- 当前轮内转角为 α \alpha α时,前轮运动的旋转中心在前轮中垂线上,而后轮不能转向,所以后轮运动旋转中心就在后轮轴线上。因此小车的运动旋转中心O是图中两条蓝色线的交点。
- 根据几何关系可以知道 θ \theta θ = α \alpha α
- 根据小车的前后轴距L,可以算出O点与内侧后轮中心距离 R = L t a n ( α ) R=\frac{L}{tan(\alpha)} R=tan(α)L
- 后面在做简化到点的时候,会用两后轮的中心C点(为什么我也不知道,原来我用的是矩形中心,但小车供应商给的驱动用的是C点)。C点与旋转中心O的距离是 R + W 2 R+\frac{W}{2} R+2W,其中W是后轴两轮中心距(车底盘宽度)。
2 问题的提出
阿克曼车型在Nav2导航中需要用到的计算包括:
2.1 根据反馈信息估算当前位置,发布odom
- 需要根据上一次计算周期的坐标(x,y,yaw),结合小车当前的前进线速度( v x v_x vx)和前轮方向转角( α \alpha α),估算小车当前的位置。
- 上位机程序一般可以读到小车底层控制传上来的速度 v x v_x vx(或根据车轮电机编码器信号可求得)和内转角 α \alpha α(或根据转向电机编码器信号可求得)。
- 这时就把小车简化为一个质点(图中C点),它绕着O点在旋转,线速度就是小车前进速度( v x v_x vx),旋转角速度是线速度除以旋转半径 ω = v x R + W 2 = v x L t a n ( α ) + W 2 \omega=\frac{v_x}{R+\frac{W}{2}}=\frac{v_x}{\frac{L}{tan(\alpha)}+\frac{W}{2}} ω=R+2Wvx=tan(α)L+2Wvx。
- 计算方法需要用到数值积分,如下图所示,该点的在map坐标系下的初始坐标(即上一次计算周期的坐标:x,y,yaw)记为(
x
0
,
y
0
,
β
0
x_0,y_0,\beta_0
x0,y0,β0),在细分到很微小的时间段
d
t
d_t
dt后,坐标变为
x 1 = x 0 + d x = x 0 + v x × d t × c o s ( β 0 ) x_1=x_0+d_x=x_0+v_x\times d_t \times cos(\beta_0) x1=x0+dx=x0+vx×dt×cos(β0)
y 1 = y 0 + d y = y 0 + v x × d t × s i n ( β 0 ) y_1=y_0+d_y=y_0+v_x\times d_t \times sin(\beta_0) y1=y0+dy=y0+vx×dt×sin(β0)
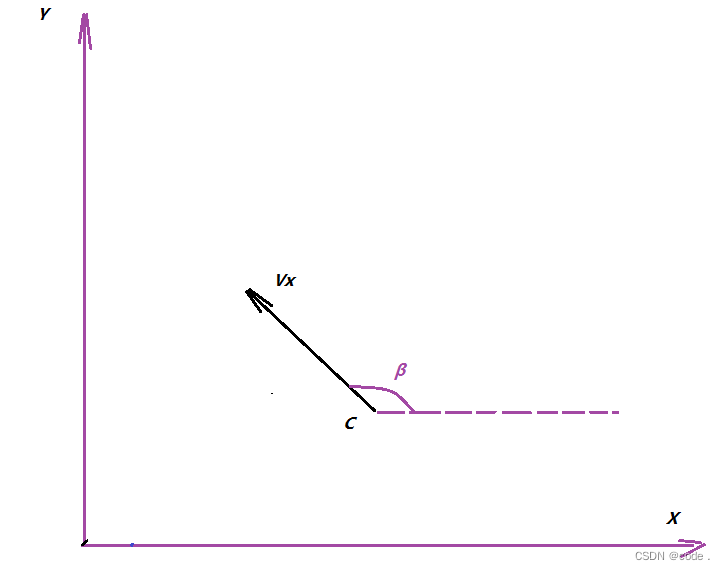
而C点是绕着O点旋转的(如下图),所以yaw( 即 β \beta β)也在变化:
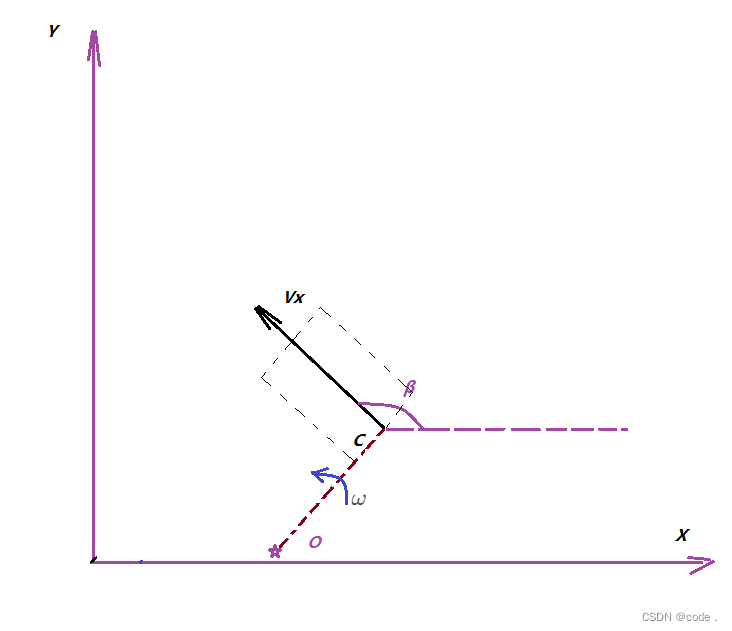
β 1 = β 0 + d β = β 0 + ω × d t = β 0 + v x R + W 2 × d t = β 0 + v x L t a n ( α ) + W 2 × d t \beta_1=\beta_0+d_\beta=\beta_0+\omega \times d_t= \beta_0+\frac{v_x}{R+\frac{W}{2}} \times d_t=\beta_0+\frac{v_x}{\frac{L}{tan(\alpha)}+\frac{W}{2}} \times d_t β1=β0+dβ=β0+ω×dt=β0+R+2Wvx×dt=β0+tan(α)L+2Wvx×dt
因为 β \beta β一直在变化,所以没法由上一时间点的坐标,直接公式求出经过计算周期 Δ t \Delta t Δt后的当前坐标,必须把 Δ t \Delta t Δt细分成微小的时间段 d t d_t dt,逐步累计(数值积分)得到当前计算时刻的坐标。(后注:其实就是纯旋转,用不着积分,😃)
本项目供应商采用的ascent库的数值积分算子RK4,把计算周期细分成100份,积分得到。
计算结果通过话题发布,作为小车的odom数据,即从开始以来,小车走过了多少路程,或者说以开始起点为坐标原点的当前坐标值 。而nav2的slam功能(一般是amcl)负责处理odom与地图的相互定位关系。(关于nav2的定位和坐标转换要另开一文来整理)
2.2 根据速度控制命令,计算小车速度和内转角
- 导航软件Nav2经过一些列规划控制计算后,由主题cmd_vel发布一个twist型的消息作为控制命令输出,该类型消息包含线速度 v x v_x vx和角速度 ω \omega ω。
- 那就需要把这个命令换算成小车前进的速度( v x v_x vx)和前轮转角( α \alpha α),然后通过某种方式(取决于小车硬件架构,本文项目是上位机通过CANBus发送速度和转向角给小车控制器就可以了)去驱动小车前进和转向。
- 从前面公式反推可得:
ω = v x L t a n ( α ) + W 2 ⇒ \omega=\frac{v_x}{\frac{L}{tan(\alpha)}+\frac{W}{2}}\Rightarrow ω=tan(α)L+2Wvx⇒
α = a r c t a n ( L v x ω − W 2 ) \alpha=arctan(\frac{L}{\frac{v_x}{\omega}-\frac{W}{2}}) α=arctan(ωvx−2WL)
注意
- 所有角度都是弧度值,如果需要显示便于理解可以乘以180/M_PI。
- 小车发布的odom里面除了坐标还有速度(twist型,线速度+角速度)。



















 2224
2224

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











