







Autonomous vehicle 杂谈_07
一. 配置Velodyne VLP16 激光雷达及Intel Realsense D435深度相机
1.1. 步骤介绍
- 安装ROS Melodic(步骤见:链接在此)
- 配置有线连接的IP地址
- 安装ROS依赖
- 创建ROS工程
- 连接设备
- 运行并通过Rviz查看点云
1.2. 详细操作
- 安装ROS(见上方链接)
- 配置有线连接:
点击电脑右上角网络标识,找到以太网,点击有线连接1(没有的话进行创建)。
修改该连接的地址信息:
| 修改对象 | 修改内容 |
|---|---|
| 地址 | 192.168.1.70 |
| 子网掩码 | 255.255.255.0 |
| 网关 | 192.168.1.1 |
- 安装ROS依赖
### 终端命令
sudo apt-get install ros-melodic-velodyne
- 创建ROS工程
### 终端命令
mkdir -p catkin_velodyne/src
cd catkin_velodyne/src
git clone https://github.com/ros-drivers/velodyne.git
cd ..
rosdep install --from-paths src --ignore-src --rosdistro melodic -y
catkin_make
source devel/setup.bash
- 运行并通过Rviz查看点云
### 终端命令
roslaunch velodyne_pointcloud VLP16_points.launch
rosrun rviz rviz -f velodyne
进入Rviz后,点击左下角Add添加By topic -> /velodyne_points -> PointCloud2
修改左边目录中的Global Options -> Fixed Frame为:velodyne
以及PointCloud2 -> Topic为:/velodyne_points
1.3. 效果展示: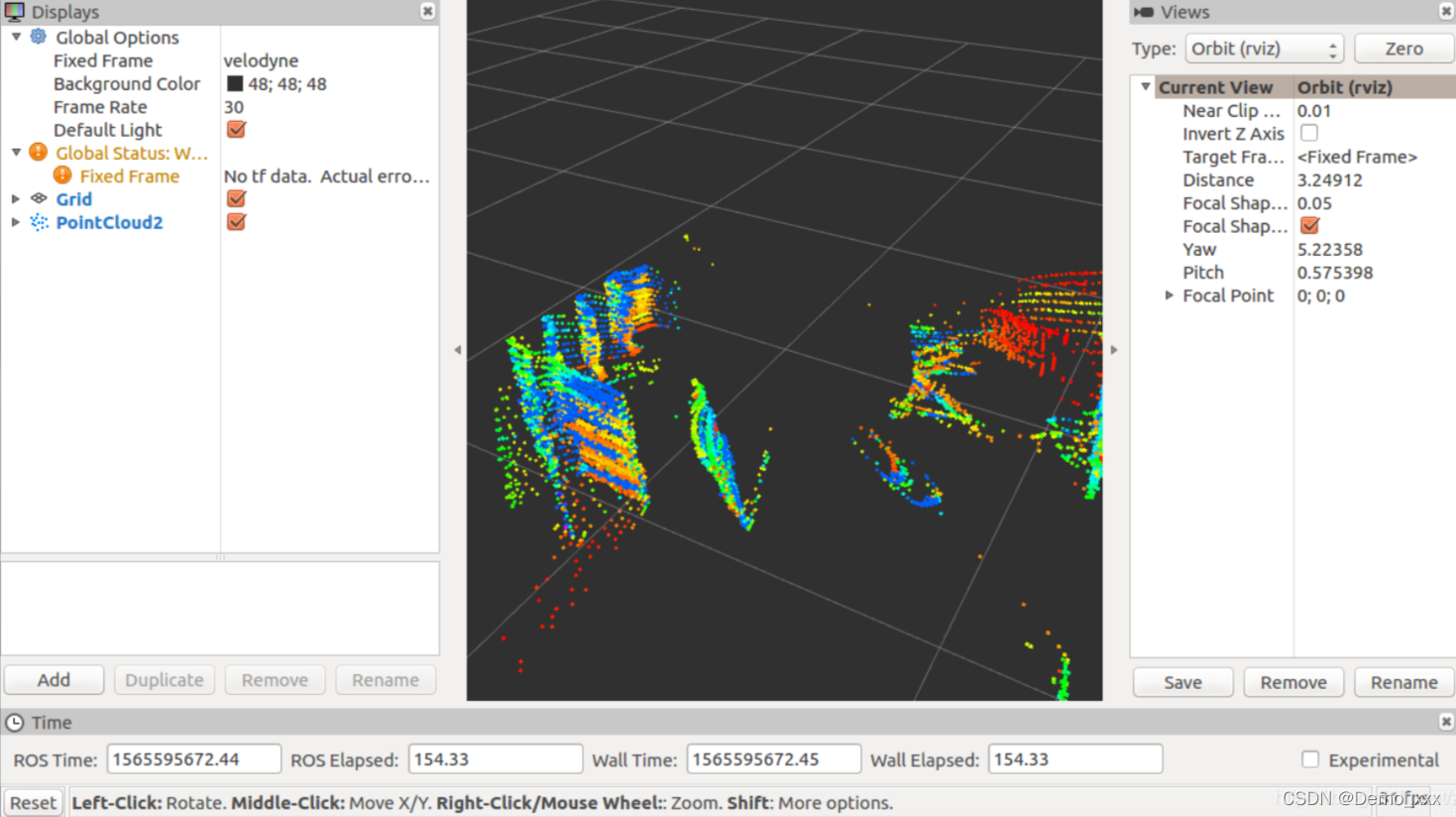
二. 配置Intel Realsense D435深度相机
2.1. 步骤介绍
- Realsense SDK安装
- Realsense Wrapper安装
- 实时发布topic,收集image消息
- Rviz查看图像
2.2. 详细操作
- Realsense SDK安装
# 第一步:克隆SDK
git clone https://github.com/IntelRealSense/librealsense
cd librealsense
# 第二步:安装相关依赖(与第一步同一终端下)
sudo apt-get install libudev-dev pkg-config libgtk-3-dev
sudo apt-get install libusb-1.0-0-dev pkg-config
sudo apt-get install libglfw3-dev
sudo apt-get install libssl-dev
# 第三步:安装权限脚本(与第一步同一终端下)
sudo cp config/99-realsense-libusb.rules /etc/udev/rules.d/
sudo udevadm control --reload-rules && udevadm trigger
# 第四步:编译与安装(与第一步同一终端下)
mkdir build
cd build
cmake ../ -DBUILD_EXAMPLES=true
make
sudo make install
# 第五步:连上摄像头进行测试(另开一个终端)
cd librealsense/build/examples/capture
./rs-capture # 安装成功后会自动打开摄像头,展示当前拍摄画面
- Realsense Wrapper安装(另起终端)
# 第一步:建立work space
mkdir -p ~/realsense_ws/src
cd ~/realsense_ws/src
catkin_init_workspace
# 第二步:下载相关功能包(与第一步同一终端下)
git clone https://github.com/pal-robotics/ddynamic_reconfigure.git
git clone https://github.com/IntelRealSense/realsense-ros.git
# 第三步:编译工作空间(与第一步同一终端下)
cd ~/realsense/
catkin_make # 如未报错,证明安装完成
# 第四步:设置环境变量(与第一步同一终端下)
echo "source ~/realsense_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
- 实时发布topic,收集image消息(另起终端)
cd ~/realsense_ws/src
roslaunch realsense2_camera rs_camera.launch # 可能Tab不出来,手动打一下
- Rviz查看图像(另起终端)
rosrun rviz rviz
进入Rviz后,点击右下角Add添加By topic -> /camera -> /color -> /image_raw -> Image
顺利运行的话,左下角会显示出当前相机收集到的图像信息
2.3. 效果展示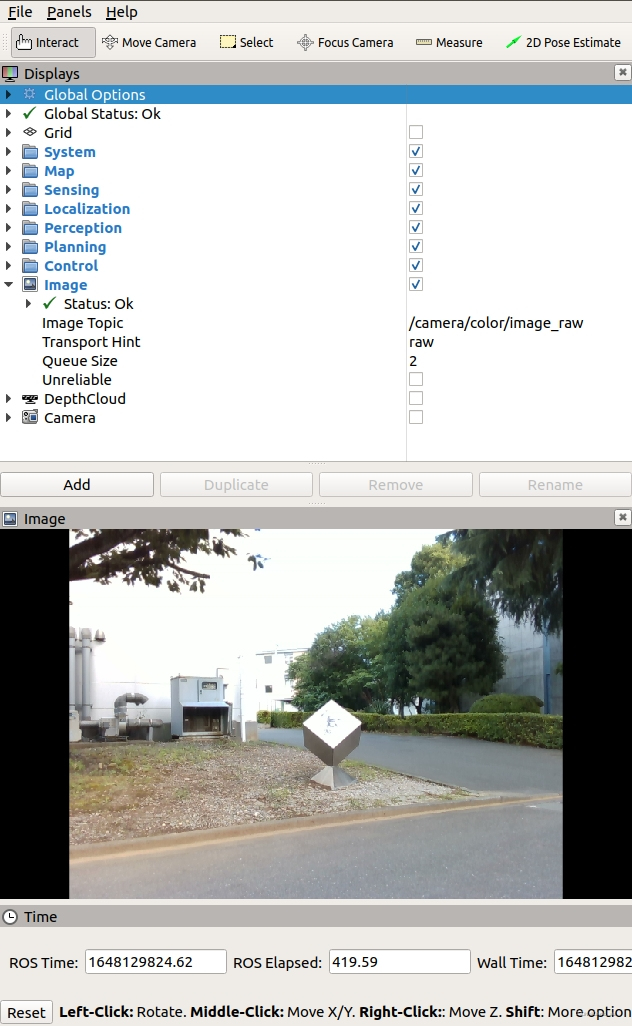
如有问题,敬请指正。欢迎转载,但请注明出处。














 3697
3697











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









