







1、说明
写一个节点给px4发送位置控制指令,比如我想让飞机飞到10,10,10这个坐标;
2、发布和订阅的mavros主题
发布的主题:
mavros/setpoint_position/local
订阅的主题:
mavros/state
mavros/local_position/pose
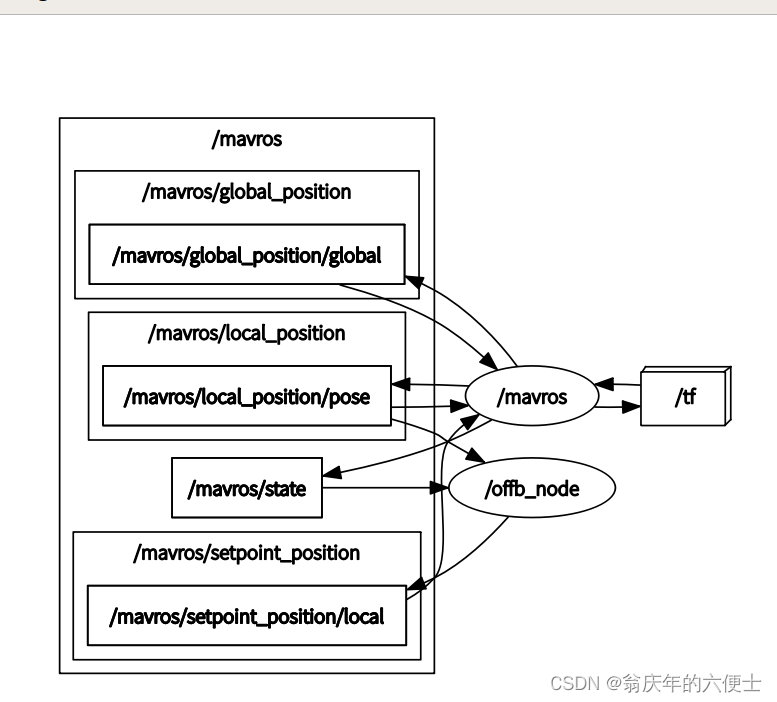
3、节点图
下面这张图里面可以看到,offb_node节点通过
mavros/setpoint_position/local是我们期望飞机到达的位置
而mavros/local_position/pose 是得到的飞机实时位置
一个是期望,一个是反馈,这个闭环控制就产生了;
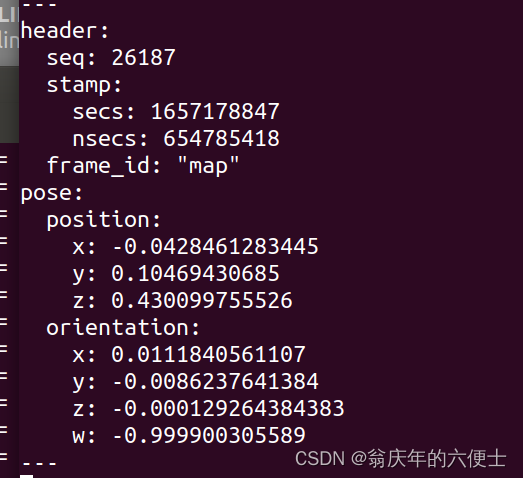
通过echo 这个/mavros/setpoint_positon/local可以得到:
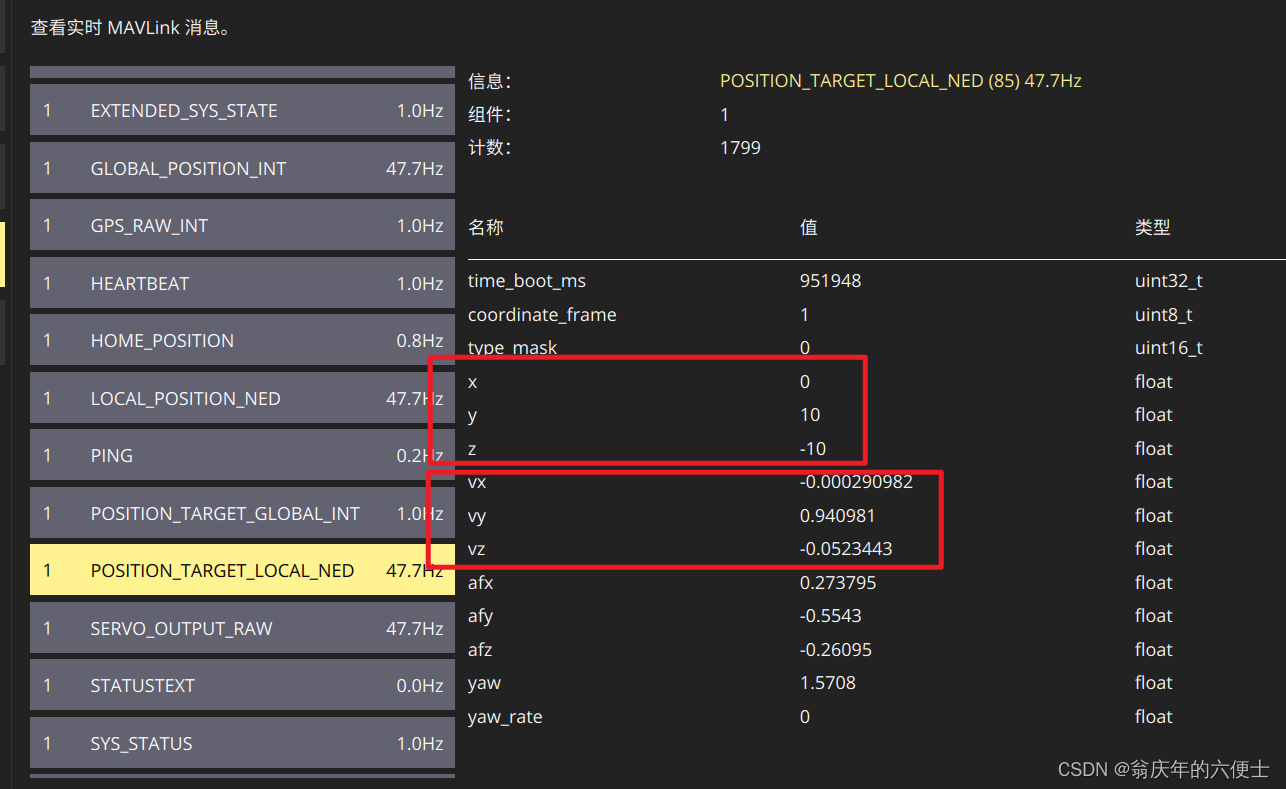
4、 QGC下观测
这个信息在QGC下mavlink检测台上可以看到是:position_target_local_ned
里面的x, y,z 就是上面的/mavros/setpoint_positon/local
但是Vx,Vy,Vz 是px4内部控制输出的;
5、code
git地址
git@github.com:vangao-gg/mavros_offboard.git
commit id:
31657caebb76b6283814261009a41456b78876cc

















 1497
1497

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









