







在UnityCG.cginc中:
// Z buffer to linear 0..1 depth
inline float Linear01Depth( float z )
{
return 1.0 / (_ZBufferParams.x * z + _ZBufferParams.y);
}
// Z buffer to linear depth
inline float LinearEyeDepth( float z )
{
return 1.0 / (_ZBufferParams.z * z + _ZBufferParams.w);
}
下面是参考《入门精要》中的推导:
https://blog.csdn.net/wodownload2/article/details/94829643
这篇文章讲解了,如何获取unity的深度纹理,并将其显示出来。
当通过纹理采样SAMPLE_DEPTH_TEXTURE之后,得到的深度值往往是非线性的。然而,我们的计算过程中通常是需要线性的深度值,也就是说,我们需要把投影后的深度值变换到线性空间下。
之前的透视投影中得到:
https://blog.csdn.net/wodownload2/article/details/85069240
透视投影矩阵为(unity使用opengl的投影方式,z映射到(-1,1)下):

也就是说用上面的投影矩阵对view空间下的顶点进行投影,得到:

上面的得到z’就是齐次裁剪空间的点坐标了。如果需要转换大ndc空间下则,需要进行透视除法。
而透视除法的因子是-z。

经过透视除法之后,得到z’',就是在(-1,1)的ndc坐标了:
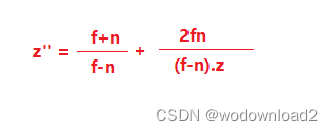
深度值z是映射到了-1到1的空间下,而能够保存在一张纹理上,则要需要转化为正数:
z’‘’ = 0.5z’'+0.5
z为原始的view空间的深度;z’为齐次裁剪空间的深度;z’‘为ndc空间的深度;z’''是转化到(0,1)的深度
经过上面的推导可以求出z:

由于在unity使用的视角空间中,摄像机正向对应的z值均为负值,因此为了得到深度值的正数表示,我们需要对上面的结果取反,最后得到的结果为:

它的取值范围是视锥体深度范围,即[near, far]。如果我们想得到范围在[0,1]之间的深度,只需要将上面的结果除以far即可。这样,0就表示该点与摄像机位于同一位置,1表示该点位于视锥体的远裁剪平面上,结果为:

幸运的是,unity提供了两个辅助函数来为我们进行上述的计算过程——LinearEyeDepth和Linear01Depth。
LinearEyeDepth负责把深度纹理的采样结果转换到视角空间下的深度值,也就是:

而Linear01Depth则返回一个范围在[0,1]的线性深度值。

经过上面的解释,应该很明确这两个函数的意思了。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









