






一、控制算法的概述
整个控制框架图,如下所示,算法分为,步态控制、外部接触控制、内部多关节协同控制、底层关节跟踪与感知模块。
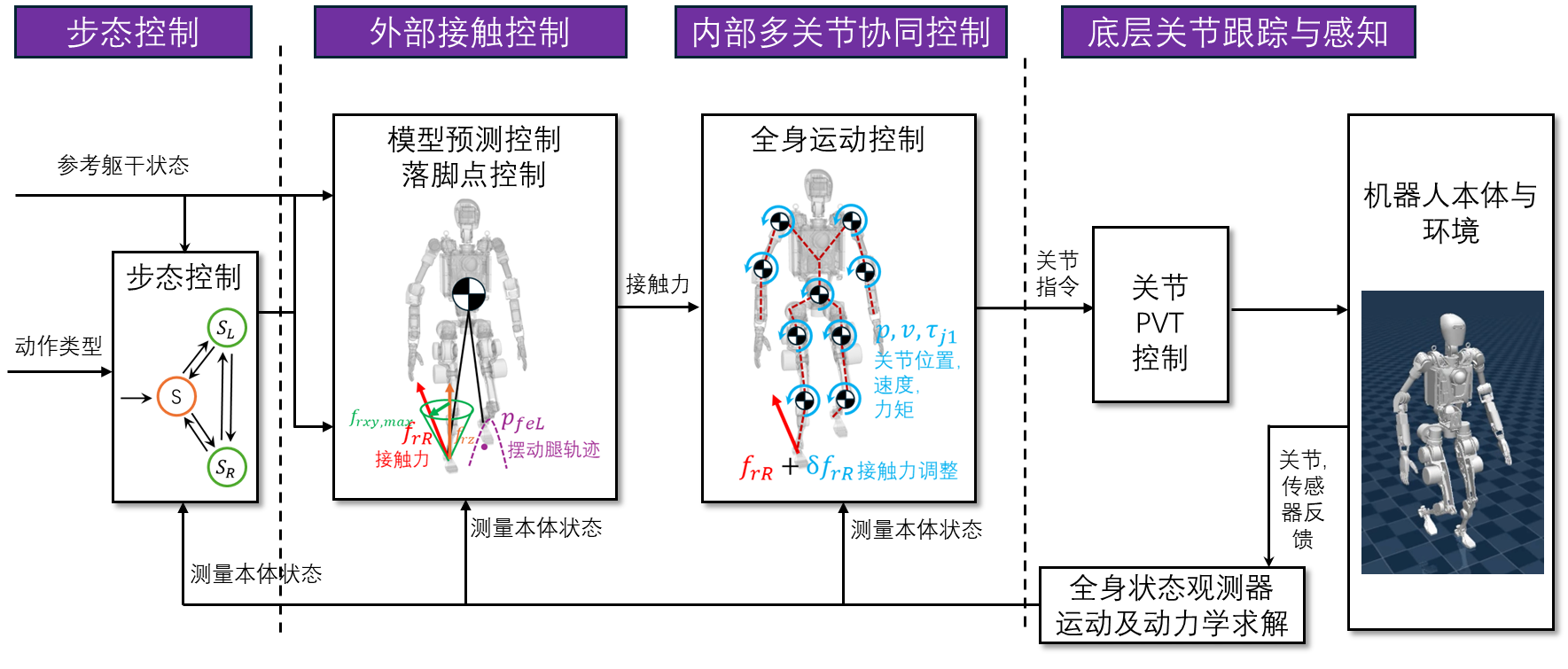
主要介绍下外部接触模块与内部多关节协同模块:
外部接触模块是基于单刚体模型,产生支撑腿的末端接触力及腾空腿的末端位置轨迹。其中:
(1)支撑腿采用模型预测控制即MPC,依靠QP,优化产生足底力,输入的系统状态为机身的姿态、位置、角速度与速度,优化目标有两个,一个是当前状态与期望的状态误差尽量小,一个是系统输入尽量小,即足底力与力矩尽量小,令系统能量输出较低,在该优化目标下设置了4组约束,1组是z方向半封闭约束,即z方向力不能小于0的值,2是摩擦力约束,利用摩擦锥约束,3是防止足底反转与扭转的力矩约束,即防止足底力矩过大导致脚面反转或者扭转,采用的是QPOASES进行QP解算,在此优化目标与约束下,产生末端接触力。
(2)对于腾空腿,是应用的基于速度进行x,y方向落脚点计算的方法,具体的计算步骤在四足机器人控制中有详解,就不赘述了,z方向是由贝塞尔曲线组合成的相位可调的轨迹,曲线如下图所示,在相位末端z会延长一段,这是为了保证腾空腿触地。
内部多关节协同控制,此部分主要是基于WBC,不同于前述的MPC,WBC是基于全身动力学模型的方法,将外部接触控制生成的末端力矩速度位置参考映射成为关节位置、速度、力矩参考。
他分为两个步骤:
第一,是运动学求解器(逆运动学),根据机身当前和期望状态,生成关节的位置、速度、加速度,这部分是应用基于零空间投影的多任务优先级控制方法,低优先级任务会在高优先级解的范围内寻找解,不会干扰到高优先级任务,实现冗余自由度机器人的控制,任务一般会分成以下几个,足底接触、机身位置、机身速度、摆动腿轨迹、手部关节控制、冗余关节,这些任务可以根据实际进行顺序的调节,经过几个任务的累加,生成关节的位置、速度、加速度;
第二,是动力学求解器,根据运动学求解器的输出还有期望的足底接触力,生成最终的关节参考,这里实际上是一个QP优化问题,对输入的期望足底接触力与关节的加速度的调节增量进行优化,设置动力学约束,来保证求解结果符合动力学模型,加入摩擦约束及接触力大小约束来保证求解结果在正常范围内,最终得到关节的位置、速度、力矩参考。
二、开发流程
开发流程如下所示:
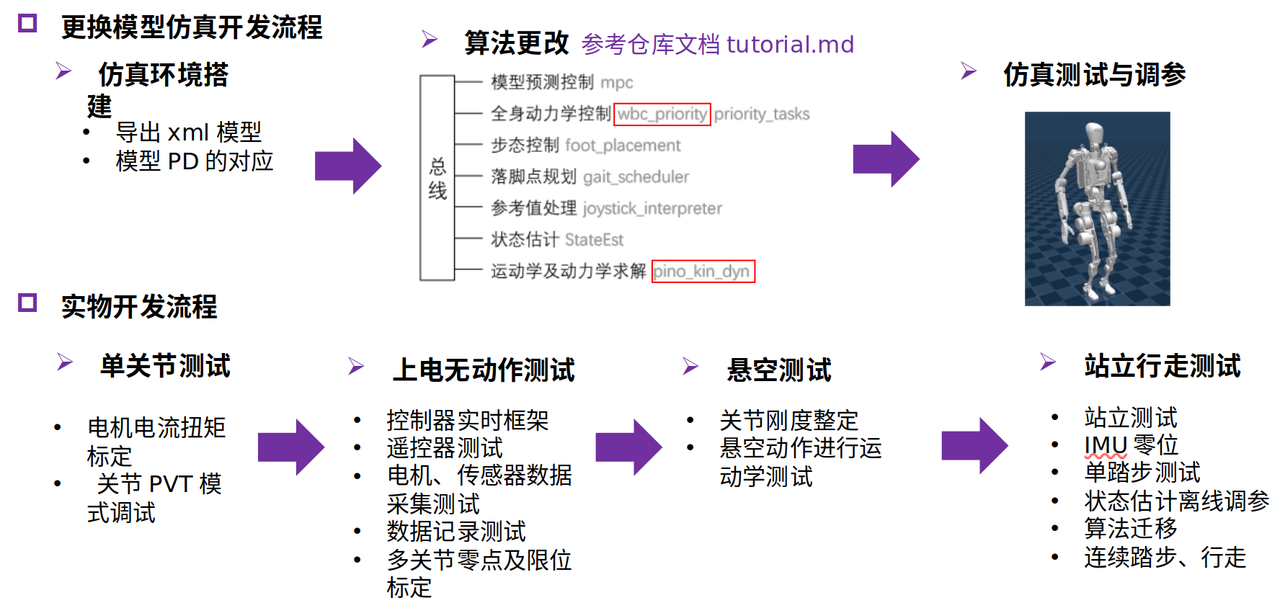
依照以上过程,整个调试过程就完成了,如果有还没上手过实物调试的朋友,可以参考。
三、pinocchio动力学求解库
pinocchio仓库基于C++的开源动力学求解库,同时也提供了python的接口,可以根据输入的URDF模型进行机器人运动学及动力学的参数计算,相关安装步骤可参考官网,也可使用openloong-dyn-control中的third party
具体功能如下:
- 动力学方程参数的求解;
- 逆运动学解算;
- 正运动学求解;
- 雅可比矩阵求解。
Pinocchio在以上模块中的底层关节跟踪与感知模块中,其计算结果在控制算法中主要用在以下几个地方,一个是正逆运动学的求解,其获取的末端位置在摆动腿轨迹计算、WBC的任务优先级计算等模块都有应用,第二是任务优先级中的雅可比矩阵的获取,第三是WBC的QP求解中,需要动力学约束,这里应用了pinocchio库计算的动力学方程参数,第四是状态估计中的足底力估计,也是应用到了动力学方程参数。
关于pinocchio应用的注意点如下所示:
1、由于人形机器人是个浮动基,q包含了质心位置、质心姿态、关节位置信息,其中前7个为浮动基的数据,浮动基的姿态采用四元数,因此q比dq多一维;
2、pinocchio中默认的关节顺序,是根据urdf中joint的名字及串联关系确定的,先根据串联关系,然后根据其首字母进行排列;
3、输入pinocchio的dq浮动基速度为本体坐标系下的速度;
4、urdf关节类型要选revolute而不是continuous,不然会q的个数会多一个;
5、获取雅可比的三种坐标形式,pinocchio中的雅可比有三种坐标形式,分别是WORLD、LOCAL、LOCAL_WORLD_ALIGNED,在获取雅可比时选取何种坐标决定了雅可比根据dq计算出的末端速度是在哪个坐标系下,world坐标系是坐标轴朝向与世界坐标系平行,原点位于机身最初的base处,local的坐标与雅可比求解的末端坐标重合,例如我们获取的是脚踝的雅可比,则local坐标系即与脚踝的坐标重合,而LOCAL_WORLD_ALIGNED的坐标系是指坐标轴朝向与世界一致,坐标轴原点与脚踝坐标系原点重合,openloong程序中雅可比应用的是LOCAL_WORLD_ALIGNED,因为程序中用的都是末端在世界坐标下的速度,而这个坐标系的坐标轴朝向与世界相同,因此速度符合算法中的要求。
6、逆运动学的求解,pinocchio官网中提供了一种闭环逆运动学的求解方法,迭代获得解,要注意为了避免奇异点问题,采用阻尼伪逆,这种方式能够减少求解时的震荡,官网中有逆运动学的范例程序,可以先用其中的默认值,如果出现求解问题,可以调节DT与参数,前面说DT类似于Kp,那就有类似于阻尼的作用,即Kd的作用,大家可以根据pd的作用机理去调节这两个参数。

















 4438
4438

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









