









PCA
线特征:
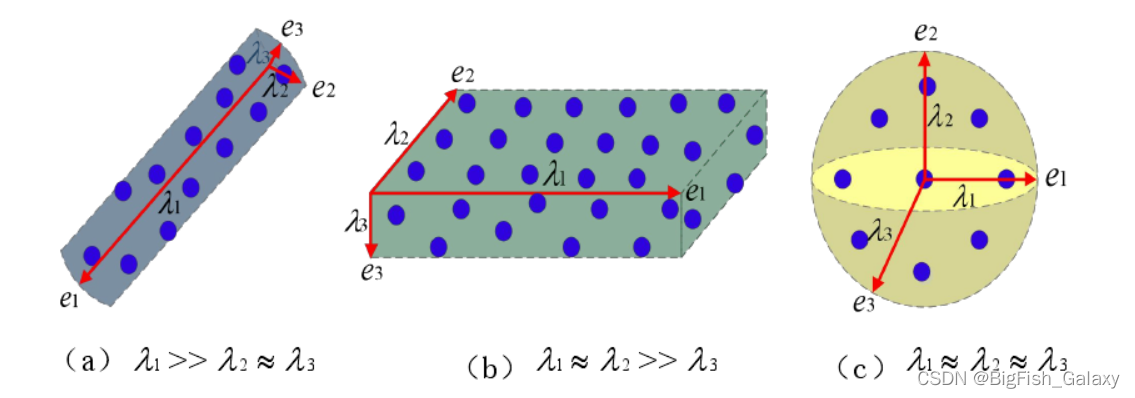
CloudCompare&PCL 提取点云中的面、线特征(PCA算法)_如何提取点云中所有线段_大鱼BIGFISH的博客-CSDN博客
落地方案:
GitHub - libing64/lidar_pose_estimator: 6 DOF pose estimator with 3D lidar data
fit-circle/lidar.hpp at 35bf7f2ea9d2b83202294f957bd9637c9e7a482e · hqking0424/fit-circle · GitHublidar_perception/curb_detect.h at 7a80ad862b9e5c10d06ca22557f8ecaef98d7628 · 530824679/lidar_perception · GitHub















 6221
6221











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









