









2D SLAM : gmapping
1. 准备的源码。
可以建一个新的ros工作空间 gampping_ws,在github下面下载好相应的源码。注意更新下gazebo下的model,不然要在线下载(需要goole),所以
给你个离线的包: 链接: http://pan.baidu.com/s/1bnE0mOR 密码: 9mft (gazebo_models.zip)
将其下载好解压替换你安装的gazebo下的models。 在你home ~ 路径下。显示隐藏文件(ctrl + H ),找到~/.gazebo/models
mkdir -p ~/gmapping_ws/src
cd ~/gmapping/src
git clone https://github.com/robopeak/rplidar_ros.git
git clone https://github.com/turtlebot/turtlebot_simulator.git
git clone https://github.com/turtlebot/turtlebot_apps.git
git clone https://github.com/turtlebot/turtlebot.git2. 源码进行相应的gazebo + gampping (利用kinect三维点云模拟2D laser)
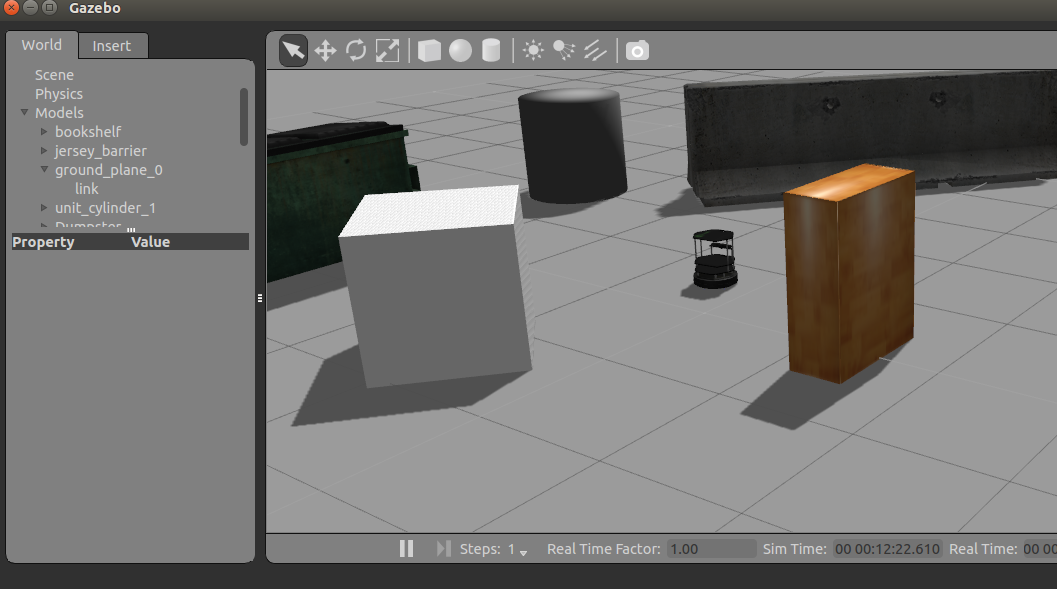
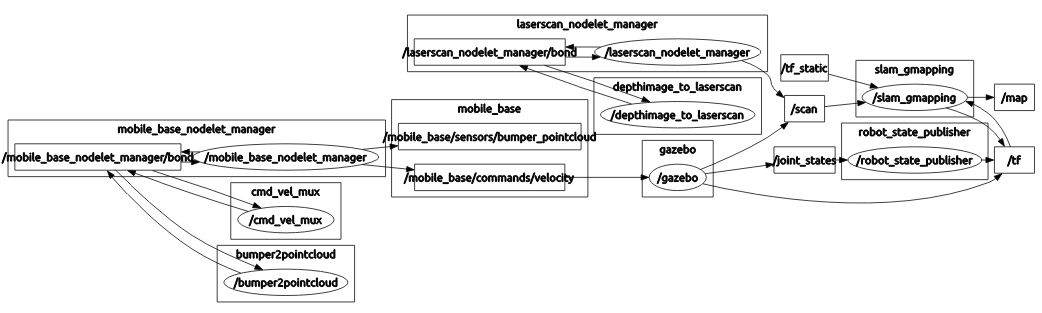
先启动gazeb, 相当于硬件启动,传感器都启动起来了。 /scan /dom 有数据了。
启动gmapping , 利用采集到的传感器数据进行制图。 /map 有数据
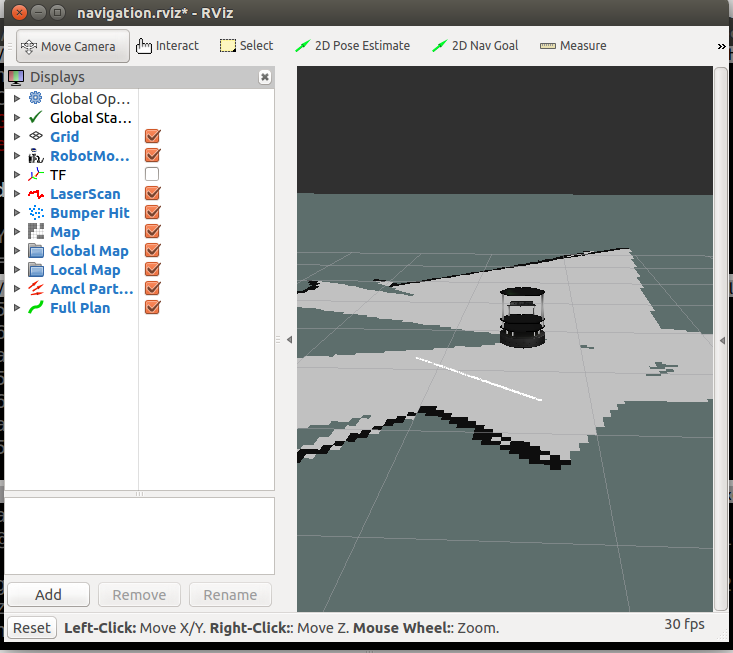
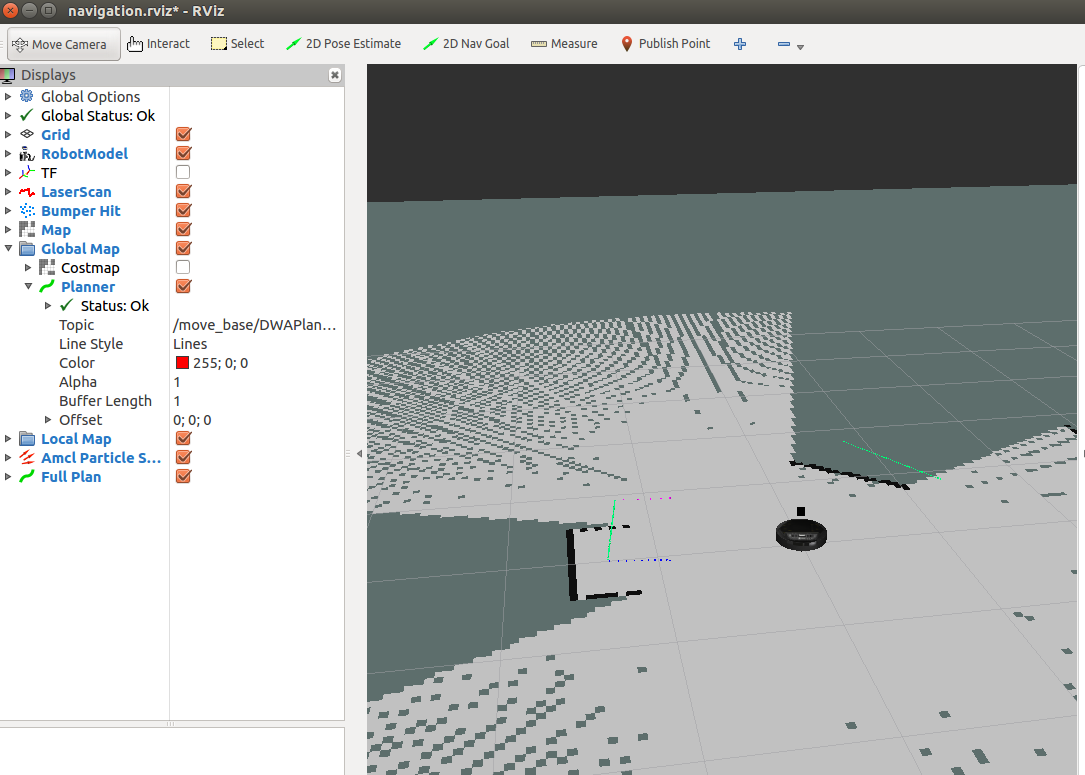
运行rviz 显示相应的制图信息。
最后运行键盘控制机器人运动制图。
roslaunch turtlebot_gazebo turtlebot_world.launch
roslaunch turtlebot_gazebo gmapping_demo.launch
roslaunch turtlebot_rviz_launchers view_navigation.launch
roslaunch turtlebot_teleop keyboard_teleop.launch
 |  |
3. 替换传感器接口 (kinct -> rplidar )
分析: 仿真也就是利用仿真环境下与仿真环境下的传感器感受虚拟的世界,将其感受到的信息发布出来。。(底层采集: 具有依赖性 )
上层算法制图依赖底层的数据接口。(满足相应的数据接口就可以使用。fake相应的sensor data 也可以,堆底层具体依赖不强)
==》 仿真更换传感器就需要更改模型urdf文件,同时在gazebo里面加入相应的传感器插件去感受相应的仿真环境,并以topic的形式发布出来。从上面的分析加上上面源码launch文件看===》只需关注 turtlebot_world.launch 文件就可以。
3.1. 看 roslaunchturtlebot_gazebo turtlebot_world.launch 文件。
与传感器模型相关的 语句是: base --- 3d_sensor ===》要换成rplidar
3.2. 看kobuki.launch.xml 文件。= > 关注urdf 文件 ==> 路径在/turtlebot/turtlebot_description/robots
<argname="urdf_file" default="$(find xacro)/xacro.py'$(find turtlebot_description)/robots/$(arg base)_$(arg stacks)_$(arg3d_sensor).urdf.xacro'" />
3.3. 在/turtlebot/turtlebot_description/robots下建立相应的urdf文件
仿照kobuki_hexagons_kinect.urdf.xacro文件建立
kobuki_nostack_rplidar.urdf.xacro
kobuki_hexagons_rplidar.urdf.xacro
<sensor_rplidar parent="base_link"/>
<xacro:includefilename="$(findturtlebot_description)/urdf/turtlebot_library.urdf.xacro" />
3.4. 进入文件$(findturtlebot_description)/urdf/turtlebot_library.urdf.xacro添加rplidar的urdf文件
<xacro:includefilename="$(findturtlebot_description)/urdf/sensors/rplidar.urdf.xacro"/>
3.5. 在路径$(findturtlebot_description)/urdf/sensors/下建立rplidar.urdf.xacro urdf文件
配置位置信息。laser相对robot的位置 坐标系的信息
<?xml version="1.0"?>
<!-- script_version=1.1 -->
<robot name="sensor_rplidar" xmlns:xacro="http://ros.org/wiki/xacro">
<xacro:include filename="$(find turtlebot_description)/urdf/turtlebot_gazebo.urdf.xacro"/>
<xacro:include filename="$(find turtlebot_description)/urdf/turtlebot_properties.urdf.xacro"/>
<!-- RPLidar 2D LIDAR -->
<xacro:macro name="sensor_rplidar" params="parent">
<joint name="laser" type="fixed">
<origin xyz="0.15 0.0 0.15" rpy="0 0.0 0.0" />
<parent link="base_link" />
<child link="base_laser_link" />
</joint>
<link name="base_laser_link">
<visual>
<geometry>
<box size="0.05 0.05 0.05" />
</geometry>
<material name="Red" />
</visual>
<inertial>
<mass value="0.000001" />
<origin xyz="0 0 0" />
<inertia ixx="0.0001" ixy="0.0" ixz="0.0"
iyy="0.0001" iyz="0.0"
izz="0.0001" />
</inertial>
</link>
<!-- Set up laser gazebo details -->
<rplidar_laser />
</xacro:macro>
</robot>
3.6. 在<xacro:include filename="$(findturtlebot_description)/urdf/turtlebot_gazebo.urdf.xacro"/>文件下添加配置laser在gazebo下的属性值插件配置
<!-- RPLidar LIDAR for simulation -->
<xacro:macro name="rplidar_laser">
<gazebo reference="base_laser_link">
<sensor type="ray" name="laser">
<pose>0 0 0 0 0 0</pose>
<visualize>false</visualize>
<update_rate>5.5</update_rate>
<ray>
<scan>
<horizontal>
<samples>360</samples>
<resolution>1</resolution>
<min_angle>-3.1415926</min_angle>
<max_angle>3.1415926</max_angle>
</horizontal>
</scan>
<range>
<min>0.10</min>
<max>6.0</max>
<resolution>0.01</resolution>
</range>
<noise>
<type>Gaussian</type>
<mean>0.0</mean>
<stddev>0.01</stddev>
</noise>
</ray>
<plugin name="rplidar_node" filename="libgazebo_ros_laser.so">
<topicName>/scan</topicName>
<frameName>base_laser_link</frameName>
</plugin>
</sensor>
</gazebo>
</xacro:macro>
3.7. 环境变量加入
export TURTLEBOT_BASE=kobuki
export TURTLEBOT_STACKS=nostack
export TURTLEBOT_3D_SENSOR=rplidar运行一致
roslaunch turtlebot_gazebo turtlebot_world.launch
roslaunch turtlebot_gazebo gmapping_demo.launch
roslaunch turtlebot_rviz_launchers view_navigation.launch
roslaunch turtlebot_teleop keyboard_teleop.launch
 |
|

4. 涉及更改的文件
/home/yhzhao/gmapping_ws/src/turtlebot/turtlebot_description/robots/kobuki_nostack_rplidar.urdf.xacro
<?xml version="1.0"?>
<!-- script_version=1.1 -->
<!--
- Base : kobuki
- Stacks : nostack
- 3d Sensor : rplidar
-->
<robot name="turtlebot" xmlns:xacro="http://ros.org/wiki/xacro">
<xacro:include filename="$(find turtlebot_description)/urdf/turtlebot_library.urdf.xacro" />
<kobuki/>
<!--<stack_hexagons parent="base_link"/>-->
<sensor_rplidar parent="base_link"/>
</robot>/home/yhzhao/gmapping_ws/src/turtlebot/turtlebot_description/urdf/turtlebot_library.urdf.xacro
<?xml version="1.0"?>
<!--
The complete turtlebot library of xacros for easy reference
-->
<robot xmlns:xacro="http://ros.org/wiki/xacro">
<!-- General -->
<xacro:include filename="$(find turtlebot_description)/urdf/common_properties.urdf.xacro"/>
<xacro:include filename="$(find turtlebot_description)/urdf/turtlebot_properties.urdf.xacro"/>
<!-- Bases -->
<xacro:include filename="$(find create_description)/urdf/create.urdf.xacro"/>
<xacro:include filename="$(find kobuki_description)/urdf/kobuki.urdf.xacro" />
<!-- Stacks -->
<xacro:include filename="$(find turtlebot_description)/urdf/stacks/circles.urdf.xacro"/>
<xacro:include filename="$(find turtlebot_description)/urdf/stacks/hexagons.urdf.xacro"/>
<!-- 3D Sensors -->
<xacro:include filename="$(find turtlebot_description)/urdf/sensors/kinect.urdf.xacro"/>
<xacro:include filename="$(find turtlebot_description)/urdf/sensors/asus_xtion_pro.urdf.xacro"/>
<xacro:include filename="$(find turtlebot_description)/urdf/sensors/asus_xtion_pro_offset.urdf.xacro"/>
<xacro:include filename="$(find turtlebot_description)/urdf/sensors/rplidar.urdf.xacro"/>
</robot>/home/yhzhao/gmapping_ws/src/turtlebot/turtlebot_description/urdf/sensors/rplidar.urdf.xacro
<?xml version="1.0"?>
<!-- script_version=1.1 -->
<robot name="sensor_rplidar" xmlns:xacro="http://ros.org/wiki/xacro">
<xacro:include filename="$(find turtlebot_description)/urdf/turtlebot_gazebo.urdf.xacro"/>
<xacro:include filename="$(find turtlebot_description)/urdf/turtlebot_properties.urdf.xacro"/>
<!-- RPLidar 2D LIDAR -->
<xacro:macro name="sensor_rplidar" params="parent">
<joint name="laser" type="fixed">
<origin xyz="0.15 0.0 0.15" rpy="0 0.0 0.0" />
<parent link="base_link" />
<child link="base_laser_link" />
</joint>
<link name="base_laser_link">
<visual>
<geometry>
<box size="0.05 0.05 0.05" />
</geometry>
<material name="Red" />
</visual>
<inertial>
<mass value="0.000001" />
<origin xyz="0 0 0" />
<inertia ixx="0.0001" ixy="0.0" ixz="0.0"
iyy="0.0001" iyz="0.0"
izz="0.0001" />
</inertial>
</link>
<!-- Set up laser gazebo details -->
<rplidar_laser />
</xacro:macro>
</robot>/home/yhzhao/gmapping_ws/src/turtlebot/turtlebot_description/urdf/turtlebot_gazebo.urdf.xacro
<?xml version="1.0"?>
<robot name="turtlebot_gazebo" xmlns:xacro="http://ros.org/wiki/xacro">
<!-- Microsoft Kinect / ASUS Xtion PRO Live for simulation -->
<xacro:macro name="turtlebot_sim_3dsensor">
<gazebo reference="camera_link">
<sensor type="depth" name="camera">
<always_on>true</always_on>
<update_rate>20.0</update_rate>
<camera>
<horizontal_fov>${60.0*M_PI/180.0}</horizontal_fov>
<image>
<format>R8G8B8</format>
<width>640</width>
<height>480</height>
</image>
<clip>
<near>0.05</near>
<far>8.0</far>
</clip>
</camera>
<plugin name="kinect_camera_controller" filename="libgazebo_ros_openni_kinect.so">
<cameraName>camera</cameraName>
<alwaysOn>true</alwaysOn>
<updateRate>10</updateRate>
<imageTopicName>rgb/image_raw</imageTopicName>
<depthImageTopicName>depth/image_raw</depthImageTopicName>
<pointCloudTopicName>depth/points</pointCloudTopicName>
<cameraInfoTopicName>rgb/camera_info</cameraInfoTopicName>
<depthImageCameraInfoTopicName>depth/camera_info</depthImageCameraInfoTopicName>
<frameName>camera_depth_optical_frame</frameName>
<baseline>0.1</baseline>
<distortion_k1>0.0</distortion_k1>
<distortion_k2>0.0</distortion_k2>
<distortion_k3>0.0</distortion_k3>
<distortion_t1>0.0</distortion_t1>
<distortion_t2>0.0</distortion_t2>
<pointCloudCutoff>0.4</pointCloudCutoff>
</plugin>
</sensor>
</gazebo>
</xacro:macro>
<!-- RPLidar LIDAR for simulation -->
<xacro:macro name="rplidar_laser">
<gazebo reference="base_laser_link">
<sensor type="ray" name="laser">
<pose>0 0 0 0 0 0</pose>
<visualize>false</visualize>
<update_rate>5.5</update_rate>
<ray>
<scan>
<horizontal>
<samples>360</samples>
<resolution>1</resolution>
<min_angle>-3.1415926</min_angle>
<max_angle>3.1415926</max_angle>
</horizontal>
</scan>
<range>
<min>0.10</min>
<max>6.0</max>
<resolution>0.01</resolution>
</range>
<noise>
<type>Gaussian</type>
<mean>0.0</mean>
<stddev>0.01</stddev>
</noise>
</ray>
<plugin name="rplidar_node" filename="libgazebo_ros_laser.so">
<topicName>/scan</topicName>
<frameName>base_laser_link</frameName>
</plugin>
</sensor>
</gazebo>
</xacro:macro>
</robot>参考:
gazebo : Connect to ROS
扩展 (仿真器) : vrep_ros_bridge http://wiki.ros.org/vrep_ros_bridge http://www.zhihu.com/question/23309094
================















 1647
1647

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









