




注意有线网的连接
注意这里rviz只做显示用,并没有结合moveit
步骤总结如下:
launch文件:这里tf加上域名,是tool0_controller和base两个tf的前缀
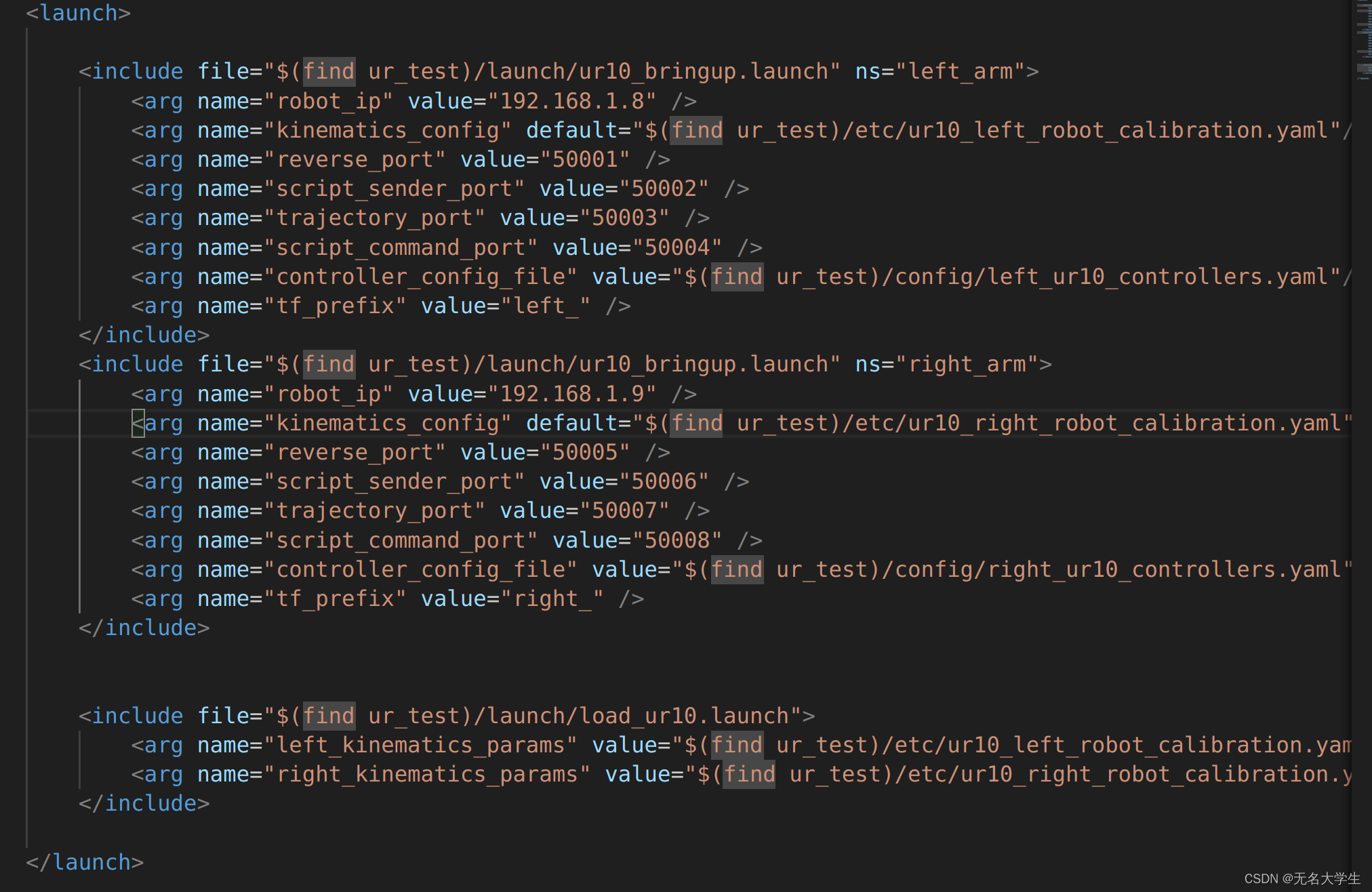
在luanch文件最后就统一加载一次模型,传递两个参数
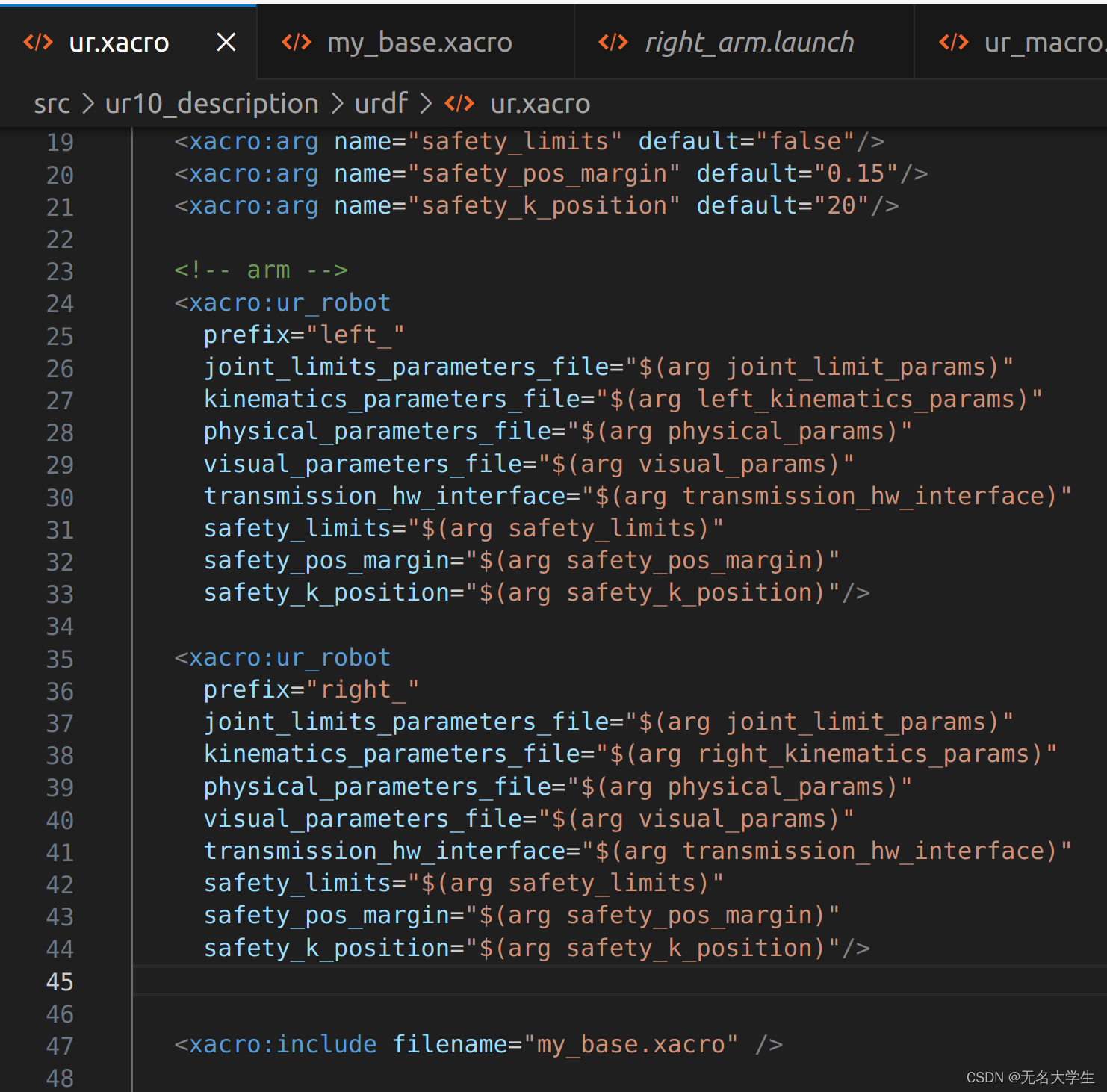
这里加上另一个机械臂,不同的前缀名将导致两机械臂的关节名有所区别
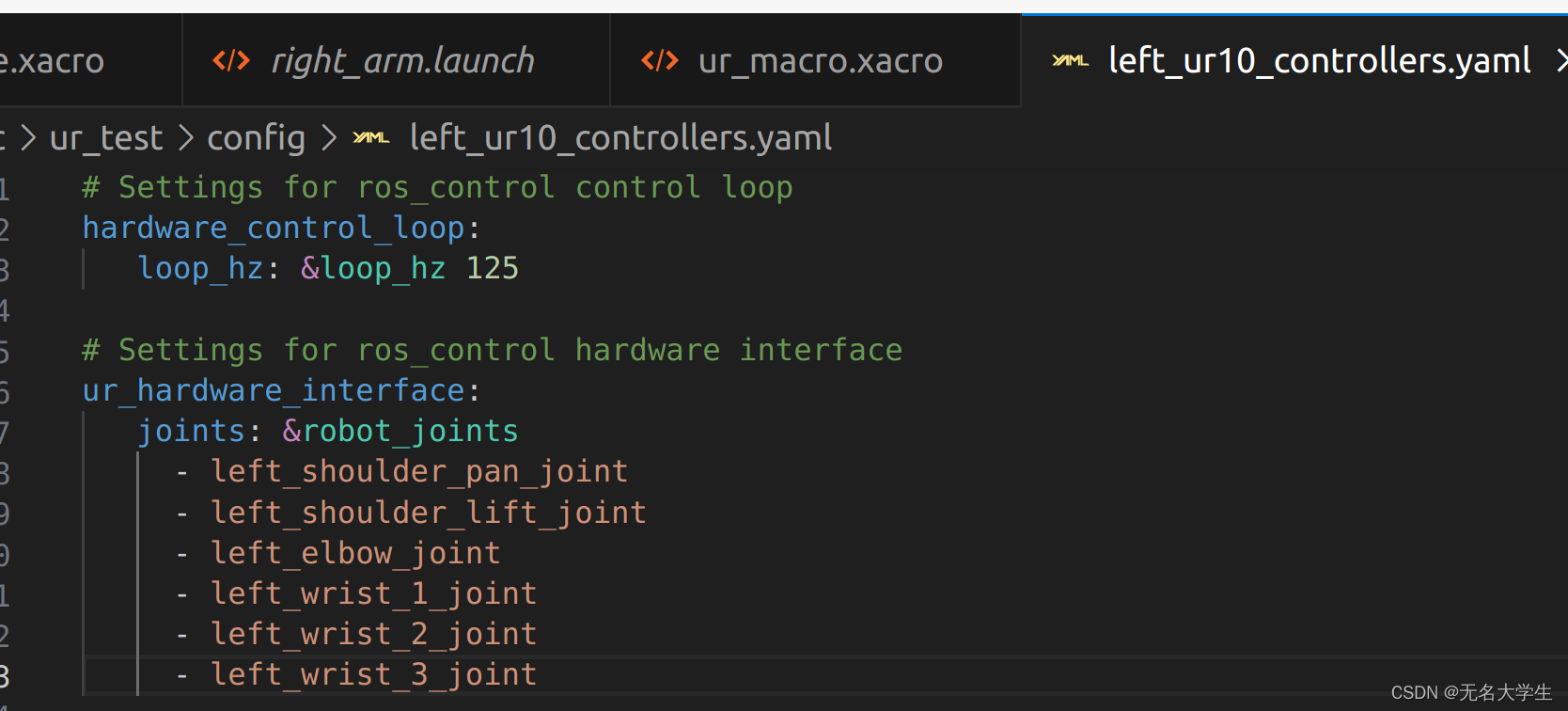
控制器配置中的关节名需要对应进行修改,在这里左右机械臂各一个参数配置文件
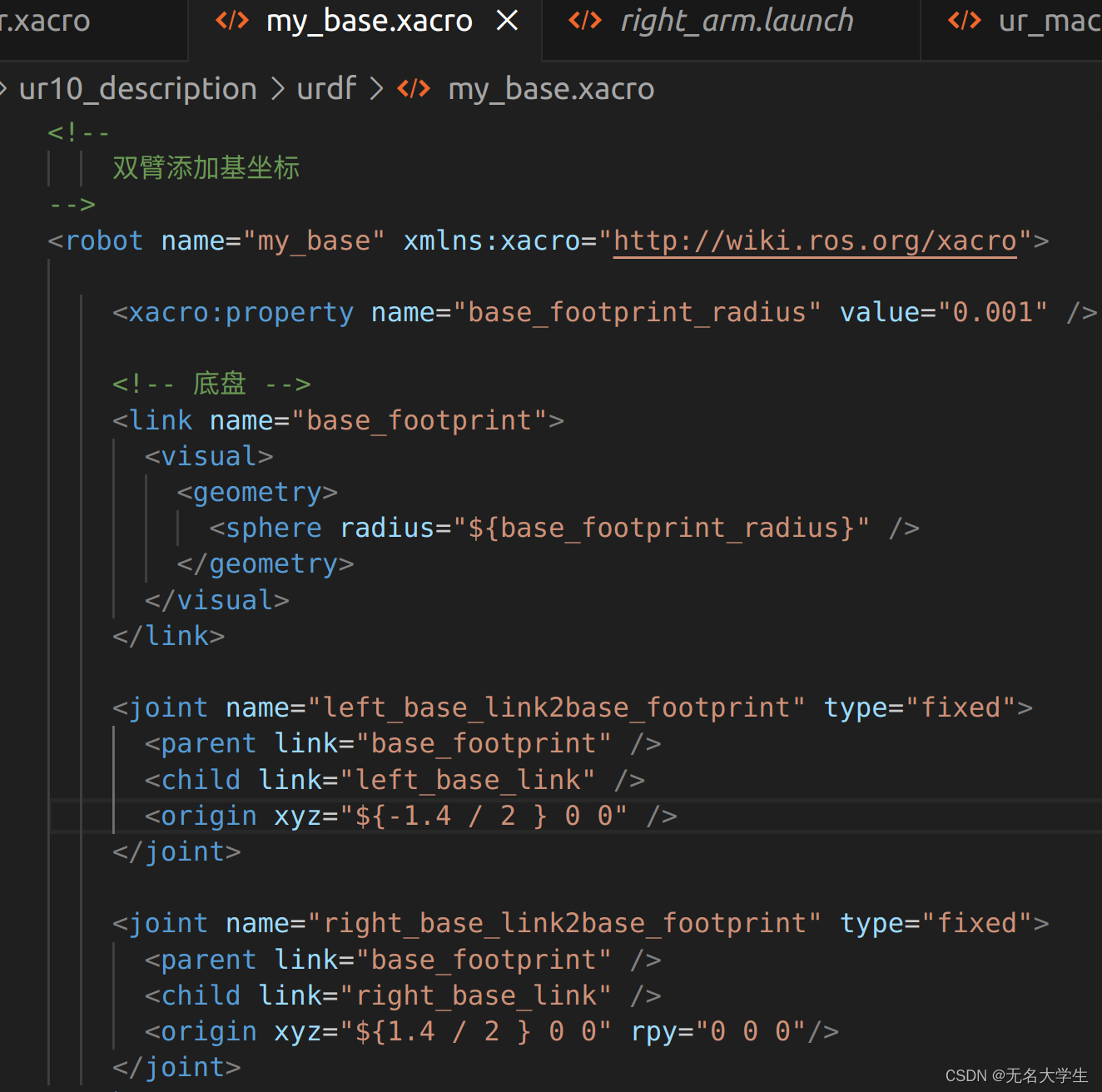
额外加一个基坐标系,并结合进ur.xacro
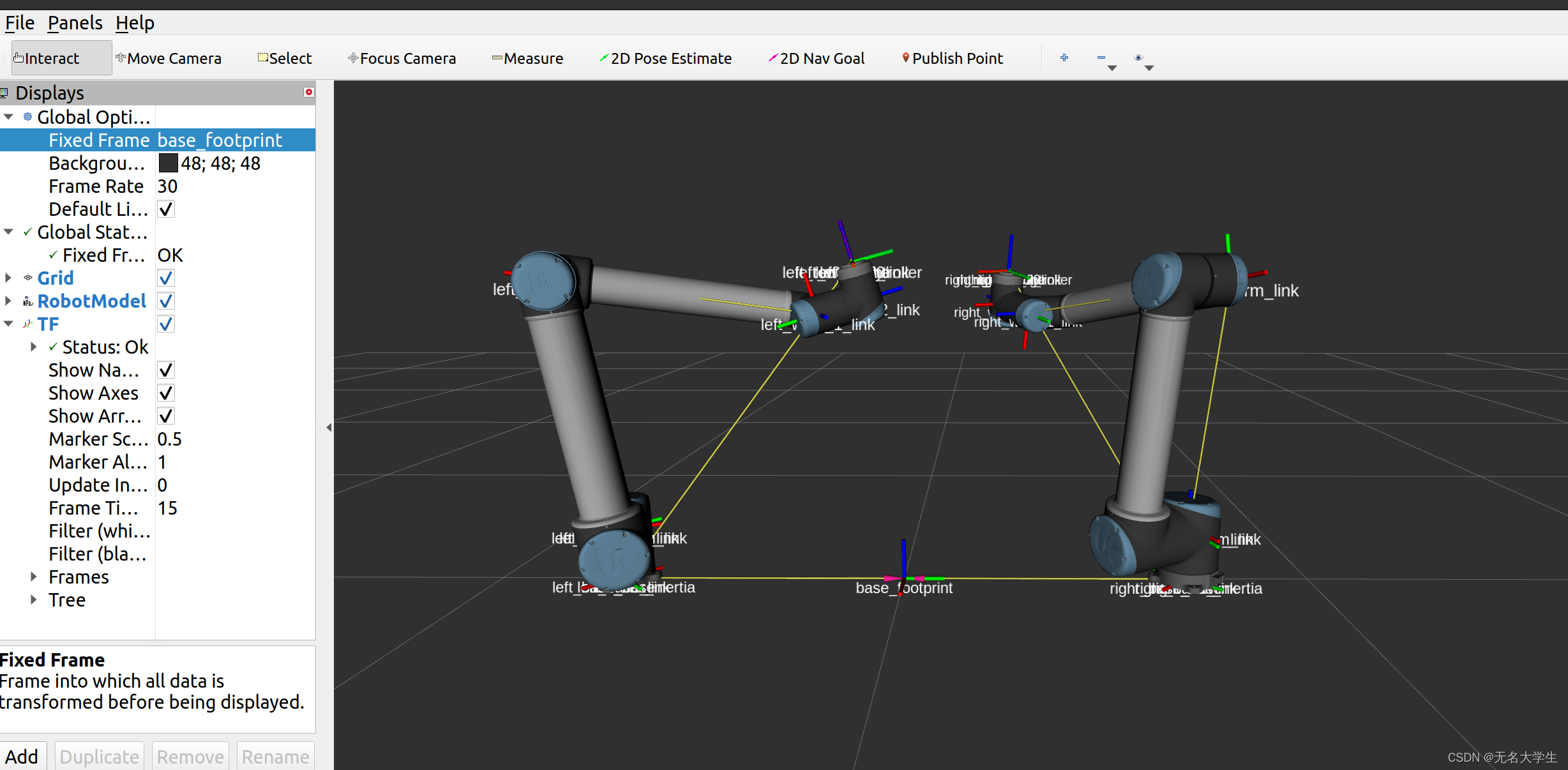
操作实物机械臂,发现rviz中的跟着一起动
出现问题可以具体查看,TF,关节的名字是否有问题
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 599
599

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











