







机器人学之运动学笔记【8】—— 微分运动学+雅克比矩阵
1. 规定几种表达形式(注意写法和含义)
- 位置向量的微分描述该点的速度、{C} frame 的原点对地的微分直接简洁的表达成 vc

- 角速度向量的表达

2. Rigid Body Motion
蓝色部分:将 rb 向量和 ra 对 b 向量都放在大坐标系下看
深色部分:将 rb 向量放在大坐标系下看,将 ra 对 b 向量放在小坐标系下看,书写时用的是斜体,实际相加时还是要转换成对同一坐标系

下面对 ra 向量作微分 diff,因为向量 I 和向量 J 的方向不动,大小不变,所以这两个分量为零,就变成了只对前面的系数微分。

小x、小y、小z三个坐标系会旋转移动,所以 ra对b的微分遵循“前导乘后+前乘后导”的原则,所以要对向量 i 和向量 j 进行微分。
那么对单位向量 i 和单位向量 j 进行微分的结果是什么呢?
如图假设有一个单位向量 e(t) ,空间中有一个旋转轴 w ,e(t) 是绕着这个旋转轴旋转,在时刻 t 和时刻 t+△t 时向量 e 的位置如图所示。向量 e(t+△t) 减去向量 e(t) 就是向量 de,de 的长度就等于虚线圆形的半径长度 |e|sinθ 乘以两半径的夹角 dθ,等式两边都对 t 求导,整理出下边的公式。关于 de 的方向,既垂直于 w,又垂直于 e,因此可见向量 e 的微分等于向量 w 和向量 e 的叉积。 (w 本身是表达在 {U} 下面)

所以将 i 和 j 的微分代入化简,注意 a 对 b 的向量可以在小坐标系下表达(上),也可以在大坐标系下面表达(下),所以:
A点对地的速度=B点对地的速度+A点由小坐标系看的速度+ w 和 a 对b向量的叉积。

对应到机器人学中,速度在不同坐标系下的表达以及关系式:

3. Velocity propagation(速度传递)
在空间中,每个连杆都有一个对地的角速度和线速度,那么在坐标系 {i} 中如何表示连杆 i 的线速度和角速度呢?又如何找到连杆 i 和连杆 i+1 速度以及线速度的关系从而求得连杆 6 相对于基坐标系的线速度角速度呢?


3.1 角速度(旋转关节)
在 {i} 上面看 link(i+1) 的角速度应该是什么?
从 i 来看的 i+1 的角速度 = 从 i 来看的 i 自己的角速度 + link(i+1) 的旋转所造成的效应。

在 {i+1} 上来看 link(i+1) 的角速度就是上述等式左右同时乘以 i 对 i+1 的旋转矩阵。

3.2 线速度(旋转关节)
从 i 来看 i+1 的速度 = 角速度与旋转半径的叉积 + 从 i 来看 i 的速度。

3.3 角速度、线速度(移动关节)

4. Jacobians
六个输入、六个输出微分状态前的表达

考虑输入端的扰动对输出端变化的关联性的话

其中如果是线性的话,雅克比矩阵 J(X) 是一个常数矩阵;
如果是非线性的话,雅克比矩阵 J(X) 是一个关于 x 的函数矩阵。
相当于做了36次泰勒展开,即使得到非线性后,代入数值也就会变成线性的样子。从 X 的微分空间转换到了 Y 的微分空间。
对应到机器人中:
关节空间的角速度 经过 雅克比矩阵 转换为 机器人末端点对地的速度和角速度 。输入端是关节空间的角速度,输出端是笛卡尔空间的速度和角速度,中间的转换是雅克比矩阵,是关节空间关节角的函数。如果是平面运动的话,是31的矩阵;如果是空间运动的话,是61的矩阵。

不同 frame 下面雅克比矩阵的转换

接下来探讨是不是可逆的问题,上面讨论的是由关节空间推出笛卡尔空间,那么如果已知的是笛卡尔空间想知道关节空间呢?雅克比矩阵可逆吗?
如果雅克比矩阵的行列式为零的话,就找不到他的逆矩阵,这种状况叫做 singular ,什么状况下会造成它 singular 呢?

5. 举例:两旋转自由度手臂
由前面所学,根据正运动学的知识可以得到各关节间的变换矩阵:



求出雅克比矩阵(3*2),求行列式的值,当θ2等于0°或者180°的时候行列式的值为零,此时是处于 singular 的状态。

对于这样简单地情况,也可以直接微分法求出运动关系。

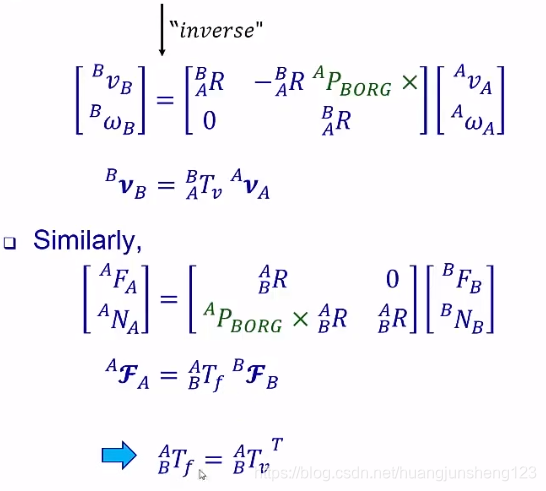
6. 力传递
上面我们在位移分析的基础之上进行了速度分析,雅克比矩阵揭示了机器人操作空间速度和关节空间速度之间的线性映射关系,不仅如此,雅克比矩阵也可以用来表示两空间之间力的传递关系。
将机器人系统定格在某一刻,探讨机器人各关节处的力和末端执行器处的力有什么关系?

7. 举例:两旋转自由度手臂
假设手臂末端单纯受到一个力,没有力矩。要从 {3} 中看到的 f3,推导出 {2} 中看到的 f2,需要做一个旋转转换,3对2的旋转变换又是单位矩阵,这说明末端点收到的力会原封不动的反应在前面的关节上面。


可以发现,力传递的雅克比矩阵和之前速度传递的雅克比矩阵只差一个转置。
(末端执行器)力 * 微小位移 = (关节)力矩 * 角位移

一旦我们知道由关节空间的关节角速度得到末端执行器速度的雅克比矩阵,我们就可以利用该雅克比矩阵的转置找到末端执行器对地的力和关节力矩之间的关系,而不需要重新做复杂的 IK。
广义的速度包含速度和角速度,广义的力包含力和力矩


















 5267
5267

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









