







x 轴表示自变量,y 轴为因变量,是一种硬性规定,没有必然的道理的。
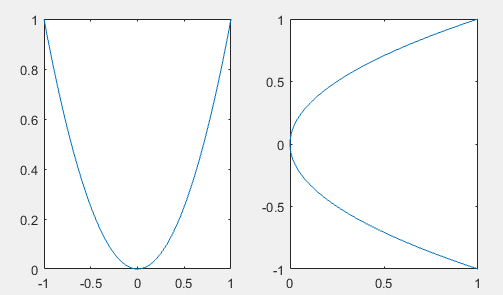
plot(x, y)
plot(y, x)如下分别为
y=x2
横轴为
x
,纵轴为
1. 不同的一维数据如何展现?
仍然采取在坐标轴上描点的形式,只不过不是自变量和因变量之间的关系,而是自变量仅仅起到标识作用:
>> y1 = mvnrnd(0, 1, 100); y2 = mvnrnd(1, 1, 100);
>> scatter(1:100, y1), hold on, scatter(1:100, y2)


















 2058
2058

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











