







摘要
直线与平面的位置关系可以通过生活中的比喻来理解,如筷子与桌子的三种关系:相交、平行和在平面内。这些关系在数学中有明确的表达,并在游戏开发中广泛应用。例如,射线检测用于判断子弹是否击中目标,碰撞检测用于角色移动时避免障碍物,反射计算用于弹球游戏中的反弹,投影与阴影用于计算影子的位置,视野判断用于敌人AI的视线检测。通过伪代码和形象图示,可以更直观地理解这些应用。口诀总结帮助记忆直线与平面的三种关系及其在游戏中的应用。
一、直线与平面的位置关系——生活中的比喻
想象你有一张桌子(平面),和一根筷子(直线)。
你可以把筷子和桌子摆出三种关系:
- 相交:筷子斜着插进桌子,和桌面有一个交点。
- 平行:筷子悬空,和桌面永远不会碰到。
- 在平面内:筷子正好平放在桌面上,和桌面“重合”了。
这三种情况,就是直线与平面最基本的位置关系。
二、数学表达
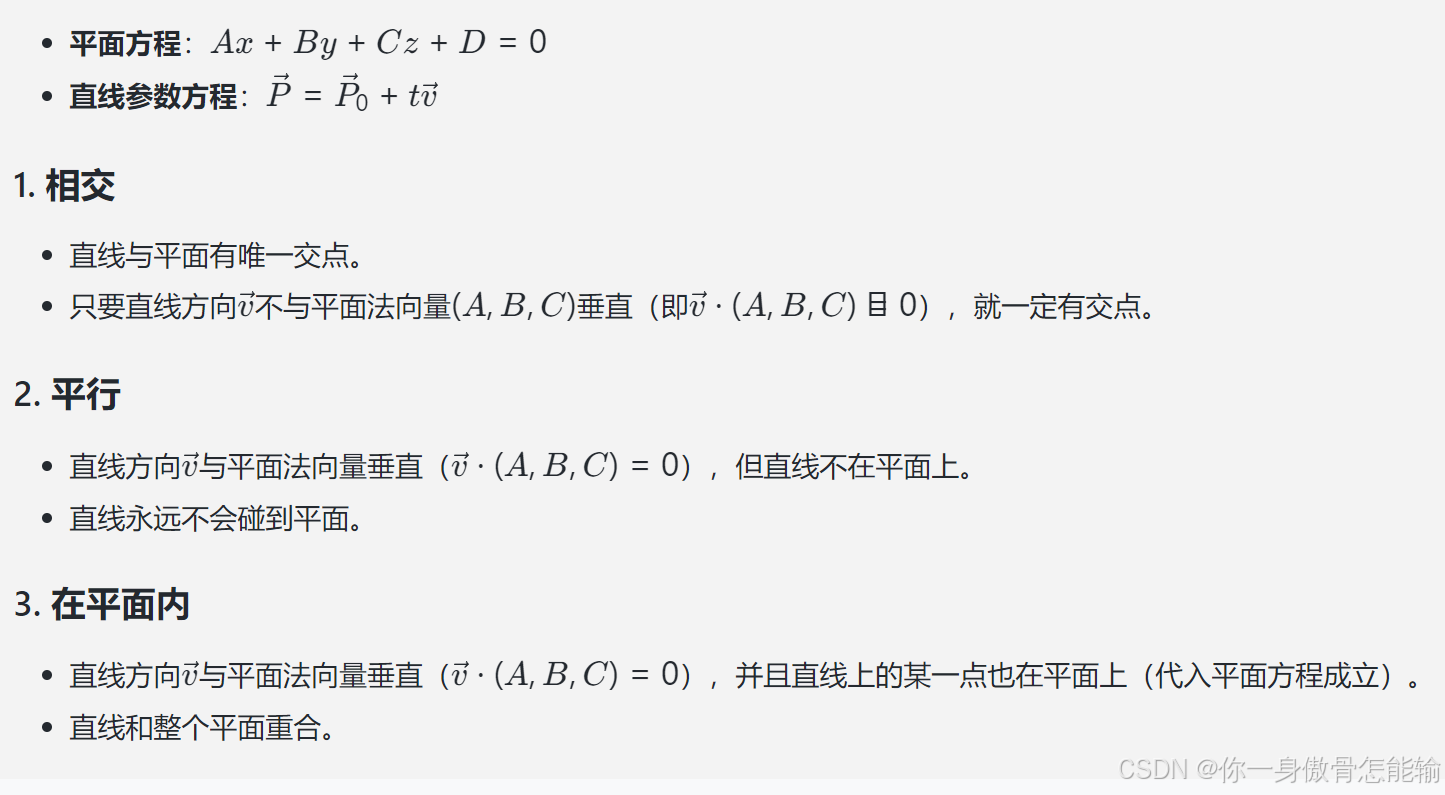
三、游戏中的实际应用
1. 射线检测(Raycast)——“你打中了什么?”
- 场景:FPS游戏中,玩家开枪,子弹飞行轨迹是一条直线。
- 应用:判断子弹是否击中墙壁、地面、敌人等障碍物。
- 原理:用子弹的直线轨迹与场景中各种平面(墙、地板等)求交点,判断是否命中。
2. 碰撞检测——“你撞墙了吗?”
- 场景:角色移动时,判断是否会撞到障碍物。
- 应用:角色的移动路径是一条线段,障碍物表面是平面。
- 原理:判断线段与平面是否相交,交点是否在障碍物范围内。
3. 反射计算——“弹一弹,反弹回去”
- 场景:弹球游戏、激光反射谜题。
- 应用:球或光线撞到平面(墙壁)后,计算反射方向。
- 原理:先求交点,再用平面法向量计算反射方向。
4. 投影与阴影——“影子落在哪里?”
- 场景:角色在阳光下,影子投射到地面。
- 应用:光线(直线)与地面(平面)求交点,得到影子的位置。
5. 视野判断——“你看得见我吗?”
- 场景:敌人AI判断玩家是否在视线内。
- 应用:用敌人视线(直线)与障碍物(平面)判断是否被遮挡。
四、形象图示
平面(桌子)
----------------------
/
/
/ 直线(筷子)
/
- 斜插:相交
- 悬空:平行
- 平放:在平面内
五、口诀总结
“直线平面三种情,
相交一点最常用;
平行永不见,
重合全在中。
游戏世界靠它判,
碰撞投影全靠拢。”
六、简要伪代码
# 直线: P = P0 + t*v
# 平面: A*x + B*y + C*z + D = 0
denom = A*v.x + B*v.y + C*v.z
if denom == 0:
# 平行或在平面内
if A*P0.x + B*P0.y + C*P0.z + D == 0:
print("直线在平面内")
else:
print("直线与平面平行")
else:
t = -(A*P0.x + B*P0.y + C*P0.z + D) / denom
P = P0 + t*v
print("直线与平面相交,交点为", P)
我们以“影子落在哪里?”为例,详细讲解投影与阴影的原理、计算过程,并配上形象图示。
一、生活场景比喻
想象你在阳光下站在地面上。
太阳发出的光线(直线)从你头顶穿过,照到地面(平面)上。
你在地面上的影子,就是你被太阳光“投影”到地面上的结果。
二、问题描述
已知:
- 物体上的一个点(比如你头顶的位置)(\mathbf{P})
- 光源的位置(比如太阳)(\mathbf{L})
- 地面(平面)的方程:(Ax + By + Cz + D = 0)
求:
- 这个点的影子在地面上的位置(即光线与地面的交点)
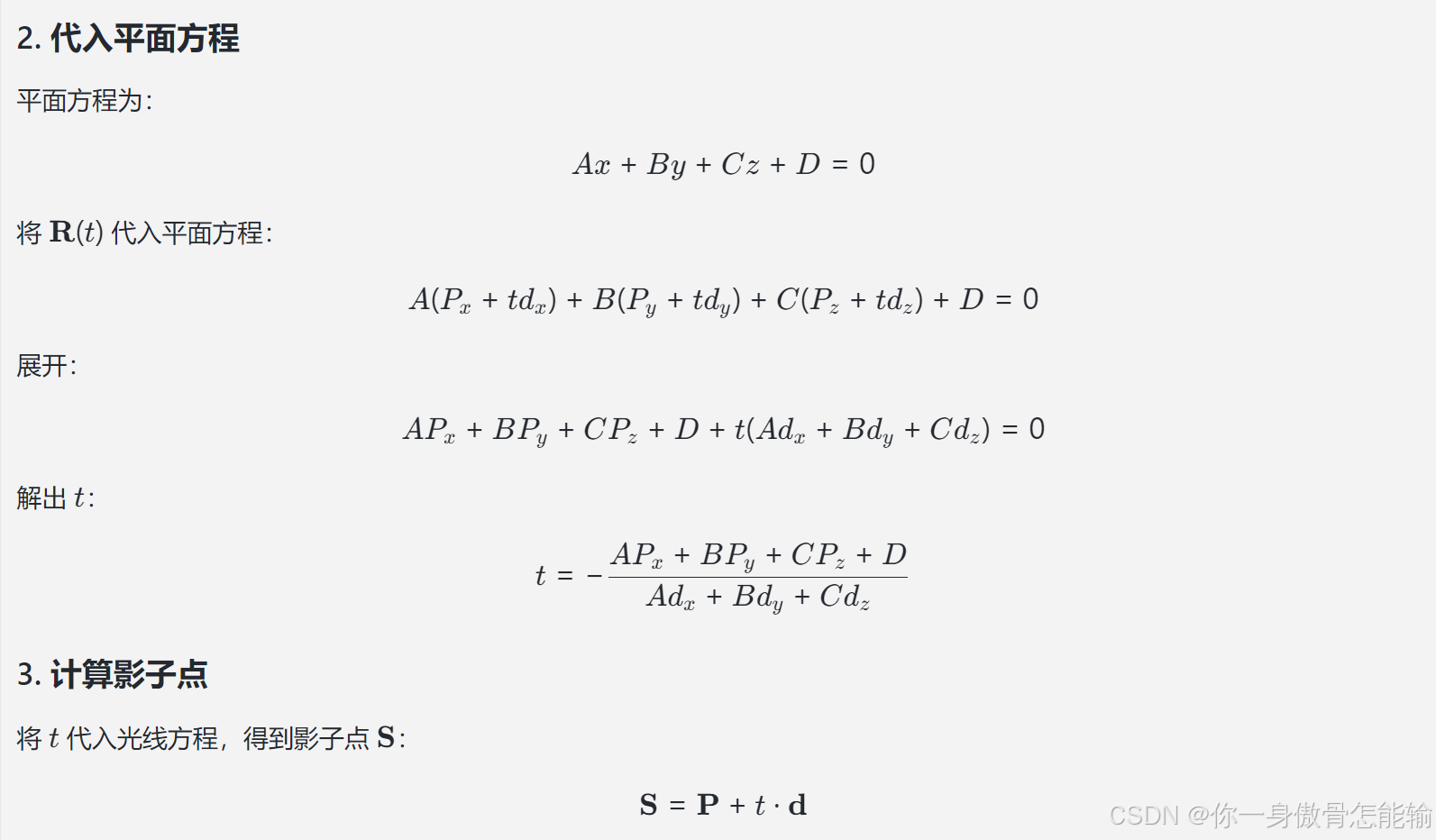
三、计算过程
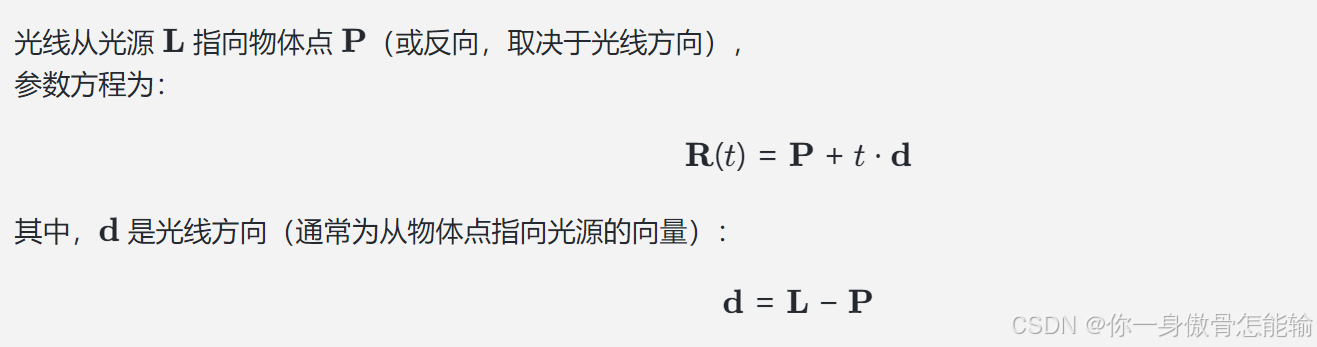
1. 光线的参数方程
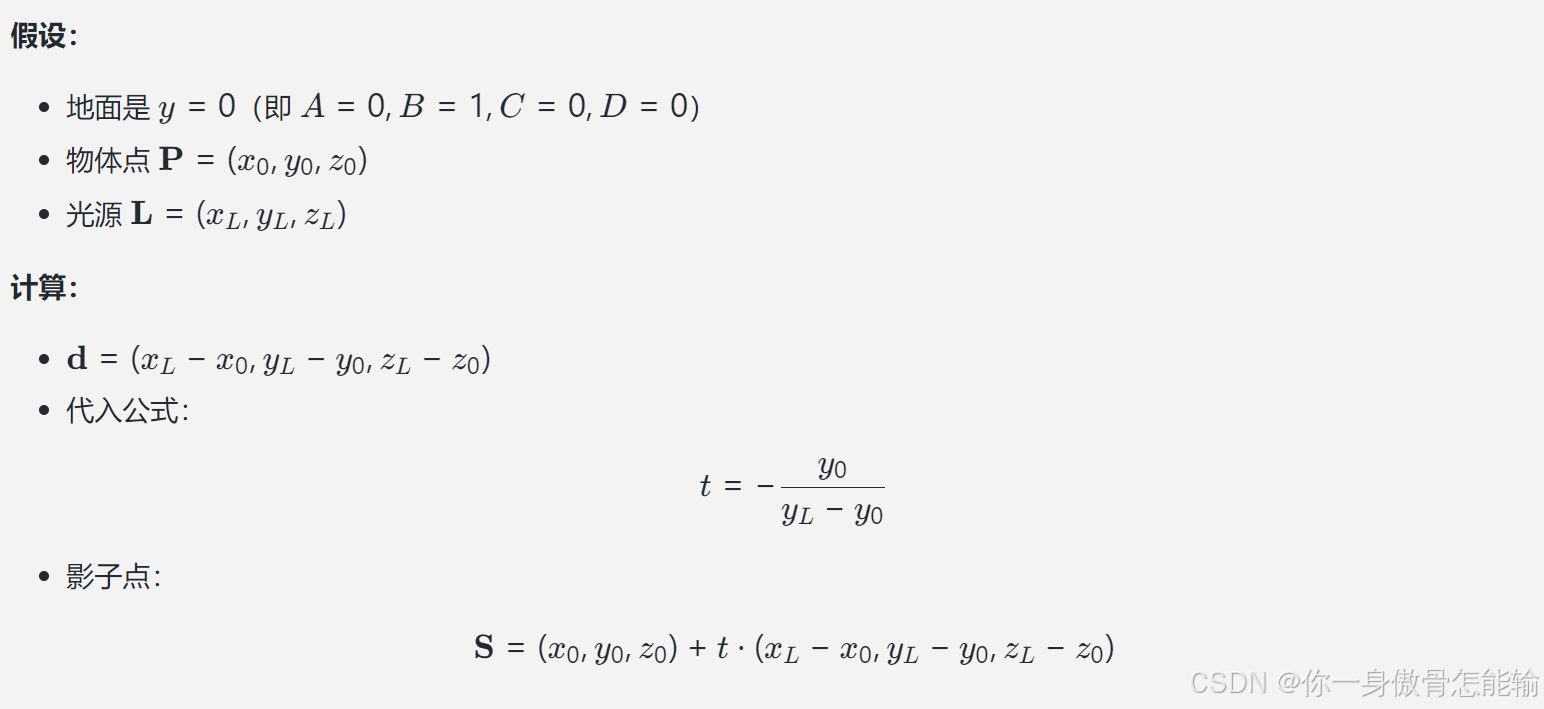
四、具体例子
五、形象图示
侧视图:
光源L
*
/|
/ |
/ |
/ |
/ |
*-----*--------- 地面(平面)
P S
物体 影子
- 直线:P到L的方向
- 交点S:影子落点
六、游戏中的实际应用
- 实时阴影:角色、物体在阳光下的影子投射
- 光照模拟:灯光照射下的投影效果
- 物理谜题:比如“影子解谜”类游戏,判断影子是否覆盖目标区域
七、口诀总结
“光线穿点落平面,
代入方程解参数;
一算交点影子现,
游戏世界影随身。”
八、伪代码示例
def shadow_on_plane(P, L, plane): # P:物体点, L:光源, plane:(A,B,C,D)
d = (L.x - P.x, L.y - P.y, L.z - P.z)
numerator = plane.A * P.x + plane.B * P.y + plane.C * P.z + plane.D
denominator = plane.A * d[0] + plane.B * d[1] + plane.C * d[2]
t = -numerator / denominator
S = (P.x + t * d[0], P.y + t * d[1], P.z + t * d[2])
return S



















 1267
1267

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











