






无人船(车)快速调参脚本简化了为无人船(车)角速率和速度控制器调参的过程。
该脚本应该在无人船(车)在Circle模式下循环绕圈时运行。它记录转向和油门输出以及由此产生的响应(例如无人船(车)的转弯速率和速度)至少10秒,以便计算前馈增益。然后将P和I增益设置为前馈的比率。一旦运行完成,参数将自动保存。
默认情况下,增益将按以下顺序进行调整:
- ATC_STR_RAT_FF,然后ATC_STR_RAT_P和I设置为FF的比率
- CRUISE_SPEED和CRUISE_THROTTLE,然后ATC_SPEED_P和I被设置为FF的比率
- 脚本还将调整滤波器设置:
- ATC_STR_RAT_FLTD和FLTT将被设置为INS_GYRO_FILTER值的一半
安装脚本
- 设置SCR_ENABLE = 1以启用脚本,然后重新启动飞控。
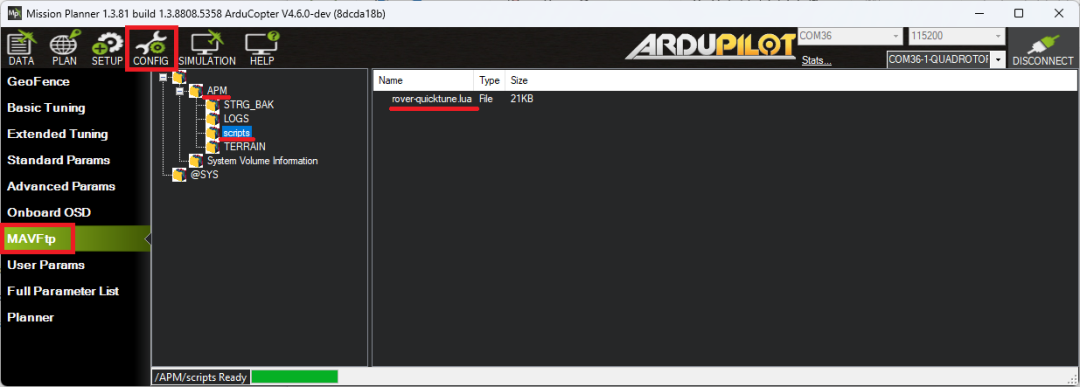
- 下载rover-quicktune。
- 将脚本复制到飞控SD卡的APM/scripts目录中。如果使用MP,可以用MAVFtp传输
-
重启飞控,设置RTUN_ENABLE = 1
-
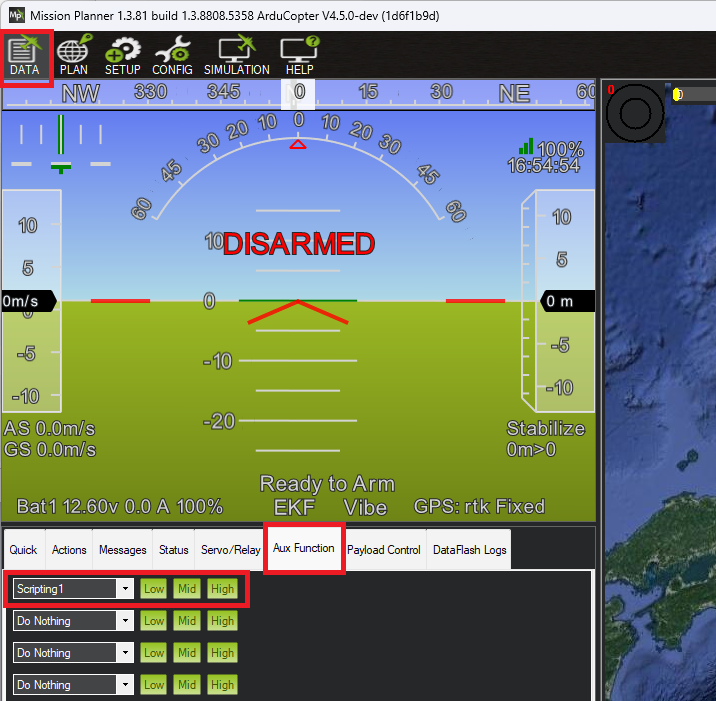
如果RC开关将用于启动/停止调谐集RCx_OPTION = 300,其中“x”是RC输入通道号。或者将任务规划器的辅助功能选项卡的行之一设置为“Scripting1”
运行QuikTune
-
去一个GPS接收良好的开阔地带
-
连接到地面站(例如任务规划或QGC),并确保可以看到消息选项卡。这是将出现调谐输出的地方
-
移动RC开关到低位置或按MP的辅助功能的“低”按钮
-
可选地将CIRC_SPEED设置为无人船(车)最大速度的一半
-
准备好无人船(车),开到空旷的地方,切换到Circle模式
-
通过将RC开关移动到中间位置或按MP的辅助功能的“中”挡位开始调谐
-
使用GCS的Messages选项卡监控曲调的进度
-
如果RC转向和油门杆从中心位置移动,则调谐将暂停
-
如果无人船(车)开始剧烈振荡,通过移动RC开关到低位置或按MP的辅助功能的“低”挡位取消调谐
-
一旦调谐完成,新的参数将自动保存
-
调完把船开回来


















 1906
1906

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











