







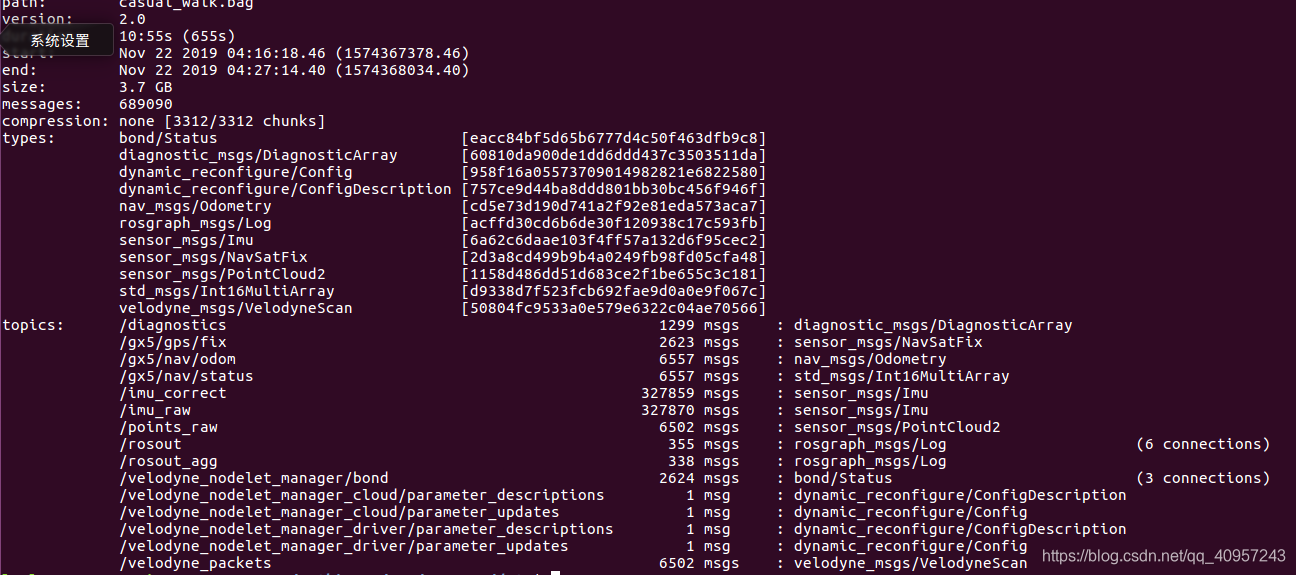
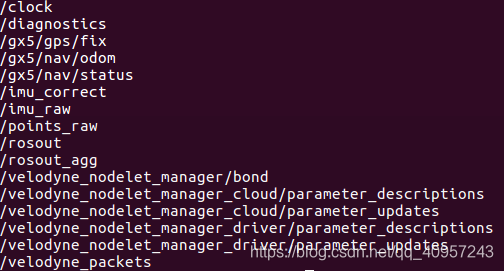
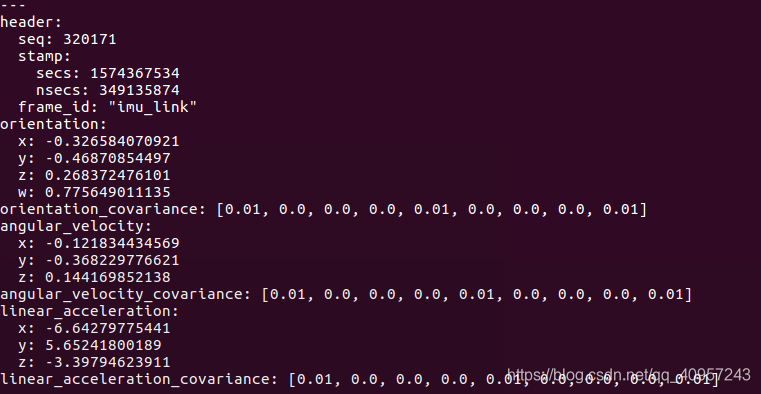
 本文介绍如何使用ROS工具解读Bag文件中的Topic消息,包括播放Bag文件、获取基本信息、列出所有话题及回放特定Topic数据。
本文介绍如何使用ROS工具解读Bag文件中的Topic消息,包括播放Bag文件、获取基本信息、列出所有话题及回放特定Topic数据。
 `
`

















评论

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言
查看更多评论
添加红包


 1107
1071
4611
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
1107
1071
4611
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言






