







 超级会员免费看
超级会员免费看
 本文详细介绍了LIO-SAM如何通过run.launch文件启动,包括了LOAM模块、机器人状态发布器、navsat、rviz等各个节点的启动和作用,解析了launch文件中的参数加载和节点启动过程。
本文详细介绍了LIO-SAM如何通过run.launch文件启动,包括了LOAM模块、机器人状态发布器、navsat、rviz等各个节点的启动和作用,解析了launch文件中的参数加载和节点启动过程。
目录
1.2 module_loam.launch ---- 代码!启动!
1.3 module_robot_state_publisher.launch --- 构建三维机器人、发布机器人信息
1 LIO-SAM如何运行起来的
1.1 run.launch --- LIO-SAM主节点
我们在catkin_ws目录下用命令行输入代码,然后播放我们的数据包:
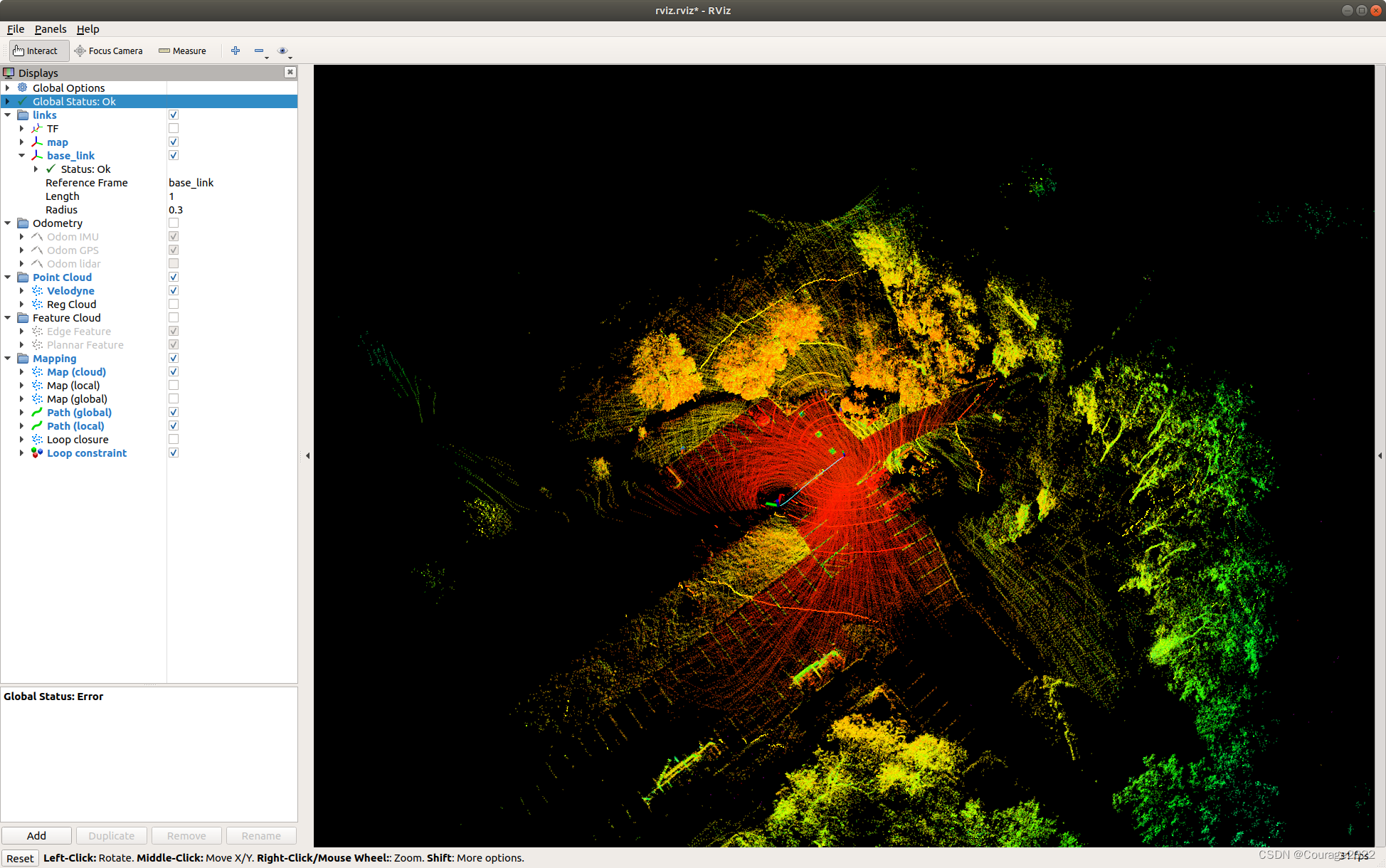
source devel/setup.bash roslaunch lio_sam run.launchLIO-SAM的所有节点就已经运行起来了,并且通过RVIZ可视化展示给我们:
为了理解我们怎么运行起来的,我们先看看run.launch文件:
<launch> <arg name="project" default

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 1135
1135

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











