







首先是安装ROS,我所用的ubuntu16.04,所安装的ROS是kinetic版本,安装请参考:
1.管理环境变量
在前面的安装过程中,配置亮环境,此时来查看ROS环境是否配置成功:
export | grep ROS植入命令之后会出现如下信息:
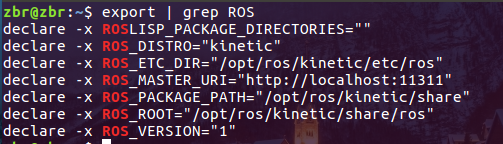
如果没有就需要重新输入添加环境变量的命令。
2.创建ROS工作空间
通过创建ros工作站,也可以检验ros是否安装成功。
mkdir -p ~/catkin_ws/src
cd catkin_ws/src
就算这个工作空间是空的,也可以直接编译
cd ~catkin_ws/
catkin_make接下来首先source一下新生成的setup.*sh文件:
source devel/setup.bash要想保证工作空间已配置正确需确保ROS_PACKAGE_PATH环境变量包含你的工作空间目录
echo $ROS_PACKAGE_PATH
/home/<youruser>/catkin_ws/src:/opt/ros/kinetic/share:/opt/ros/indigo/stacks准备工作做好亮就可以进行后续的学习。
参考文献:http://wiki.ros.org/cn/ROS/Tutorials/InstallingandConfiguringROSEnvironment















 3254
3254











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









