 ROS ABB 机器人整合指南
ROS ABB 机器人整合指南








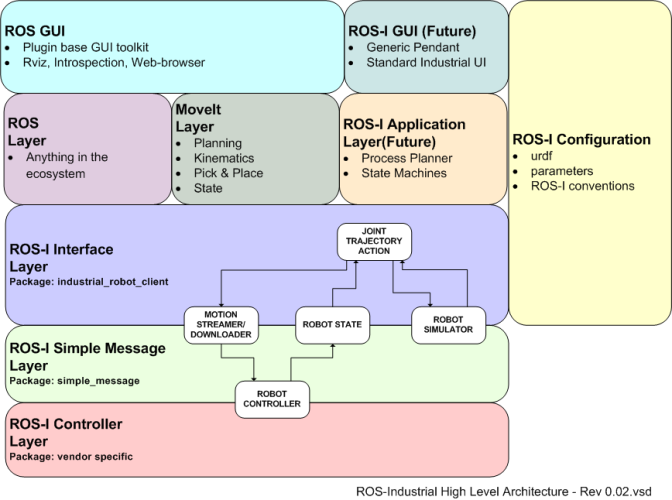
 本文介绍如何在ROS (indigo)环境下整合ABB机器人,包括功能包的下载与编译流程。支持RobotStudio 5.x及6.x版本进行联合调试,并能够应用于实体机器人上。此外,还探讨了LeapMotion手势遥控机器人的实现方式。
本文介绍如何在ROS (indigo)环境下整合ABB机器人,包括功能包的下载与编译流程。支持RobotStudio 5.x及6.x版本进行联合调试,并能够应用于实体机器人上。此外,还探讨了LeapMotion手势遥控机器人的实现方式。
ROS(indigo)ABB机器人例子
参考网址:
1 http://wiki.ros.org/Industrial
3 https://github.com/ros-industrial/abb
4 https://github.com/ros-industrial/abb_experimental
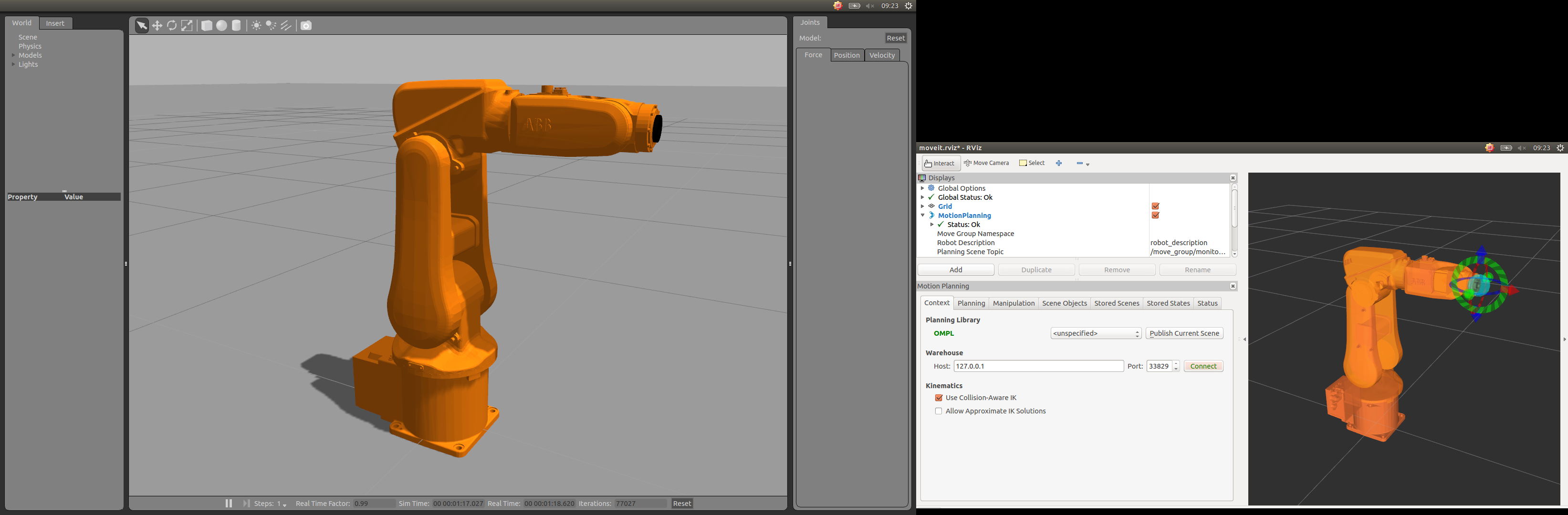
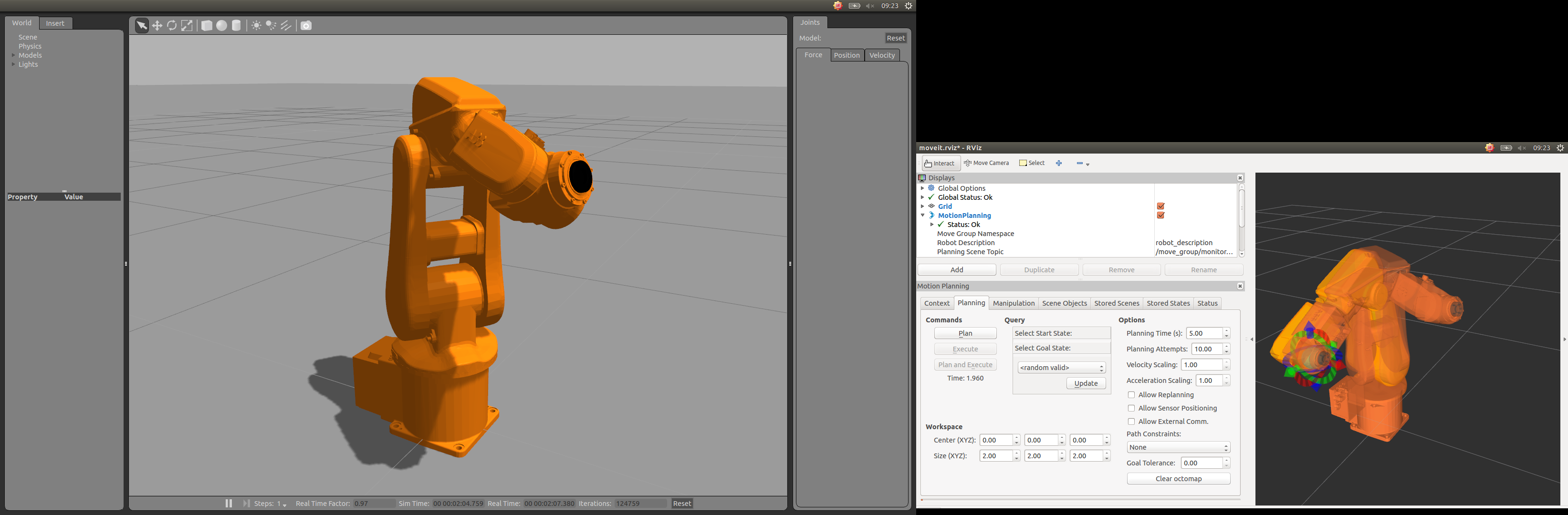
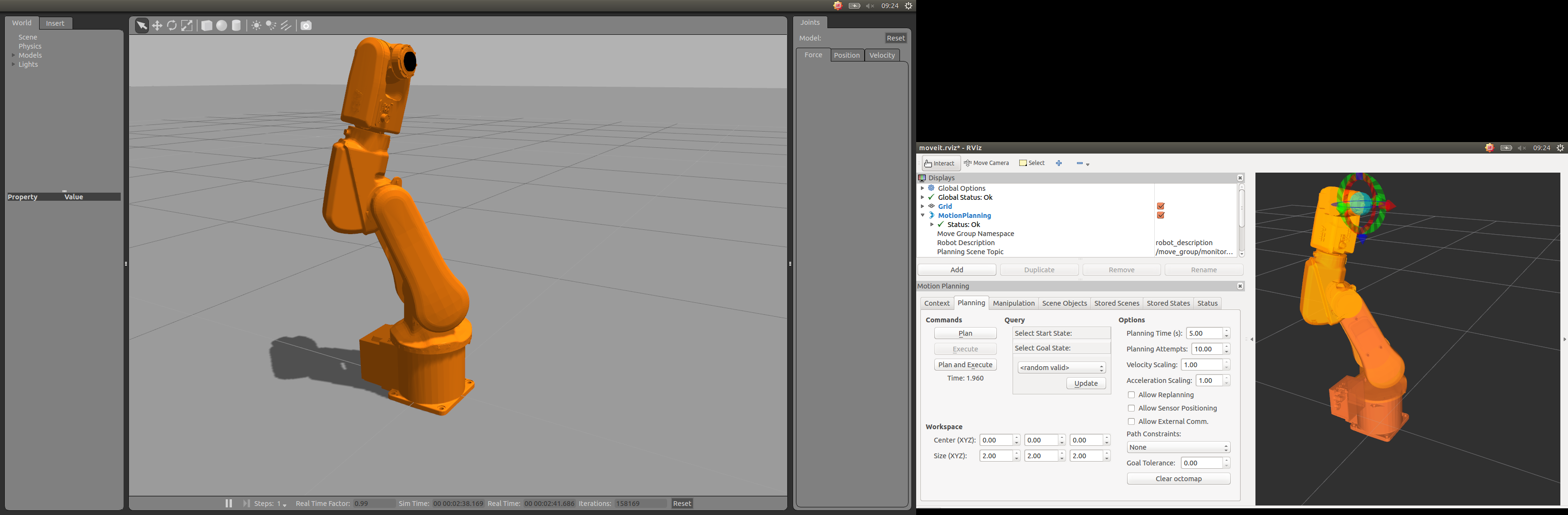
下载功能包,编译后使用。
如果一切正常,可以看到如下使用场景。
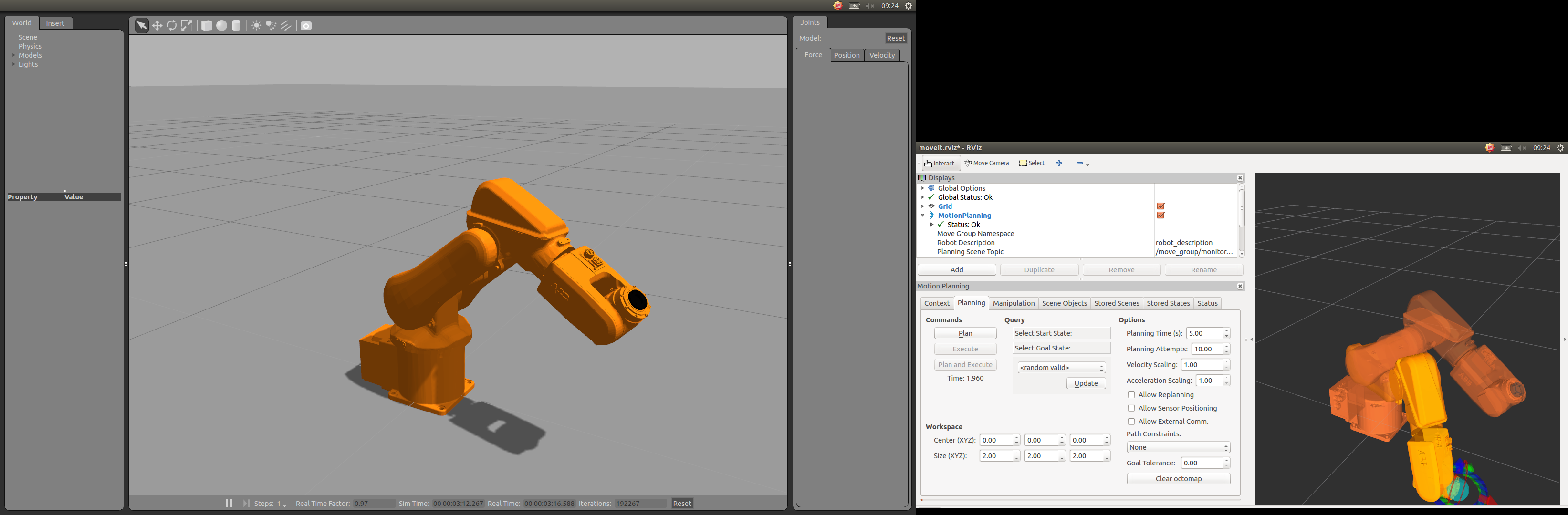
当然也支持ABB RobotStudio 5.x 6.x版本联调,同时能支持实体机器人,实验室正在积极建设,相关程序正在调试中。
Leap Motion手势遥控机器人也在调试中。



















 5791
5791

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











