







ROS官网和Github上提供了一些在OSX上使用ROS的方法。这里做一下总结:
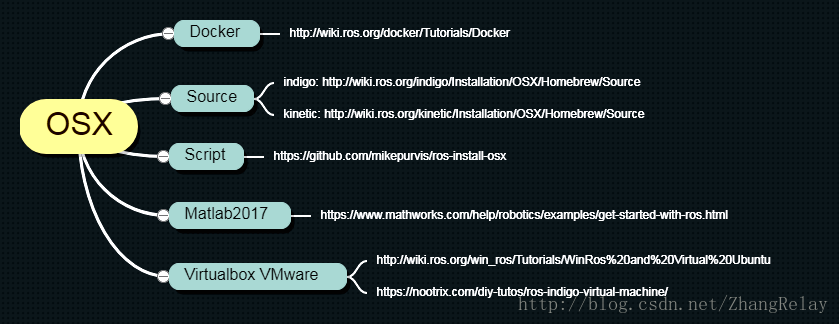
参考链接:https://github.com/mikepurvis/ros-install-osx
安装使用要点:
git clone https://github.com/mikepurvis/ros-install-osx.git
cd ros-install-osx
./install
----
ros-install-osx
This repo aims to maintain a usable, scripted, up-to-date installation procedure for ROS, currently Lunar. The intent is that the install script may be executed on a El Capitan or newer machine and produce a working desktop_full installation, including RQT, rviz, and Gazebo.
This is the successor to my popular gist on the same topic.
Usage
git clone https://github.com/mikepurvis/ros-install-osx.git
cd ros-install-osx
./install
Note that if you do not yet have XQuartz installed, you will be forced to log out and in after that installation, and re-run this script.
You will be prompted for your sudo password at the following points in this process:
- Homebrew installation.
- Caskroom installation.
- XQuartz installation.
- Initializing rosdep.
- Creating and chowning your
/opt/ros/[distro]folder.
The installation can be done entirely without sudo if Homebrew and XQuartz are already installed, rosdep is already installed and initialized, and you set the ROS_INSTALL_DIR environment variable to a path which already exists and you have write access to.
Step by Step
The install script should just work for most users. However, if you run into trouble, it's a pretty big pain to rebuild everything. Note that in this scenario, it may make sense to treat the script as a list of instructions, and execute them one by one, manually.
If you have a build fail, for example with rviz, note that you can modify the catkin build line to start at a particular package. Inside your indigo_desktop_full_ws dir, run:
catkin build --start-with rviz
If you've resolved whatever issue stopped the build previously, this will pick up where it left off.
Troubleshooting
Python and pip packages
Already-installed homebrew and pip packages are the most significant source of errors, especially pip packages linked against the system Python rather than Homebrew's Python, and Homebrew packages (like Ogre) where multiple versions end up installed, and things which depend on them end up linked to the different versions. If you have MacPorts or Fink installed, and Python from either of those is in your path, that will definitely be trouble.
The script makes some attempt at detecting and warning about these situations, but some problems of this kind will only be visible as segfaults at runtime.
Unfortunately, it's pretty destructive to do so, but the most reliable way to give yourself a clean start is removing the current homebrew installation, and all currently-installed pip packages.
For pip: pip freeze | xargs sudo pip uninstall -y
For homebrew, see the following: https://gist.github.com/mxcl/1173223
If you take these steps, obviously also remove your ROS workspace and start the install process over from scratch as well. Finally, audit your $PATH variable to ensure that when you run python, you're getting Homebrew's python. Another way to check which Python you are running is to do:
which python # Should result in /usr/local/bin/python
ls -l $(which python) # Should show a symlink pointing to Homebrew's Cellar
If you are getting permission errors when you sudo uninstall pip packages, see Issue #11 and this StackOverflow Q&A.
El Capitan support
The install script may not work as smoothly in OS X El Capitan. Here are some pointers, tips, and hacks to help you complete the installation. This list was compiled based on the discussion in Issue #12.
library not found for -ltbb
See Issue #4. You need to compile using Xcode's Command Line Tools:
xcode-select --install # Install the Command Line Tools
sudo xcode-select -s /Library/Developer/CommandLineTools # Switch to using them
gcc --version # Verify that you are compiling using Command Line Tools
The last command should output something that includes the following:
Configured with: --prefix=/Library/Developer/CommandLineTools/usr
You'll then have to rerun the entire install script or do the following:
rm -rf /opt/ros/indigo/* # More generally, /opt/ros/${ROS_DISTRO}/*
rm -rf build/ devel/ # Assuming your working dir is the catkin workspace
catkin build \
... # See actual script for the 4-line-long command
dyld: Library not loaded
If you see this after installation, when trying to execute rosrun, then you have System Integrity Protection enabled. The installation script should have detected that and suggested a quick fix. Please refer to the very last section of install
----














 598
598











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









