









大家好,我是小鱼,之前发过通过apt安装的ROS2-turtlebot3今天我们来编译源码跑跑,方便后续对源码进行学习。
本篇教程所用平台
- Ubuntu20.04
- ROS2 Foxy
一、源码下载与编译工程
前提是装好ROS2(没装的小伙伴可以参考小鱼的一行代码安装ROS2),接着我们就可以下载三个官方仓库的源码了。
因为从github下载慢,大家可以到鱼香ROS官网使用github代理
打开终端,创建ROS2工作空间并下载源码
mkdir -p turtlebot3_ws/src
cd turtlebot3_ws/
git clone https://ghproxy.com/https://github.com/ROBOTIS-GIT/turtlebot3.git src/turtlebot3 -b foxy-devel
git clone https://ghproxy.com/https://github.com/ROBOTIS-GIT/turtlebot3_msgs.git src/turtlebot3_msgs -b foxy-devel
git clone https://ghproxy.com/https://github.com/ROBOTIS-GIT/turtlebot3_simulations.git src/turtlebot3_simulations -b foxy-devel
下载完成后就像需要安装下依赖,小鱼使用rosdepc来安装依赖
记得是在工作空间下运行
rosdepc install --from-paths src --ignore-src -y
接着就可编译了
colcon build
二、开始建图
接着上面的我们就可以继续建立地图
在我们刚刚编译好的工作空间source下,接着配置gazebo模型位置
这句话其实是指出来gazebo所需要的models所在的位置
export GAZEBO_MODEL_PATH=$GAZEBO_MODEL_PATH:`ros2 pkg \
prefix turtlebot3_gazebo \
`/share/turtlebot3_gazebo/models/
分别打开三个终端
终端1 source并启动gazebo仿真
source install/setup.bash
export TURTLEBOT3_MODEL=burger
ros2 launch turtlebot3_gazebo turtlebot3_world.launch.py
终端2 source并启动建图
source install/setup.bash
export TURTLEBOT3_MODEL=burger
ros2 launch turtlebot3_cartographer cartographer.launch.py use_sim_time:=True
终端3 source,启动键盘控制节点
source install/setup.bash
export TURTLEBOT3_MODEL=burger
ros2 run turtlebot3_teleop teleop_keyboard
 保存地图
保存地图
打开终端,运行指令
ros2 run nav2_map_server map_saver_cli -f turtlebot2_map
三、根据已有地图启动导航程序
3.1 启动导航程序
关闭上面的建图和键盘控制(Ctrl+C)
接着运行导航程序,这里注意要指向刚刚的map地图位置才行
source install/setup.bash
export TURTLEBOT3_MODEL=burger
ros2 launch turtlebot3_navigation2 navigation2.launch.py \
use_sim_time:=true map:="you map address".yaml
地图位置可以使用相相对目录,比如小鱼这里
ros2 launch turtlebot3_navigation2 navigation2.launch.py use_sim_time:=true map:=map/my_map.yaml
5.2 初始化机器人的位置
启动后,机器人最初并不知道它在哪里,你会看到终端一直在报错,没关系,初始下位置就好。因为默认情况下,导航程序等待您给出一个大致的起始位置。
我们必须手动机器人的初始位置和方向。此方法应用于 AMCL 定位算法。
以通过点击RVIZ上的位置估计按钮初始化

- 单击"2D 姿势估计"按钮
- 单击机器人所在的地图中的近似点,拖动箭头指出机器人所面朝的方向
如果一次搞定最好不过,不行可以多搞机器人,在导航过程中也可以使用这种方法来优化机器人位置的精准性。
设置完成初始化为自后,tf树就搞定了,接着就可以让机器人出发了。
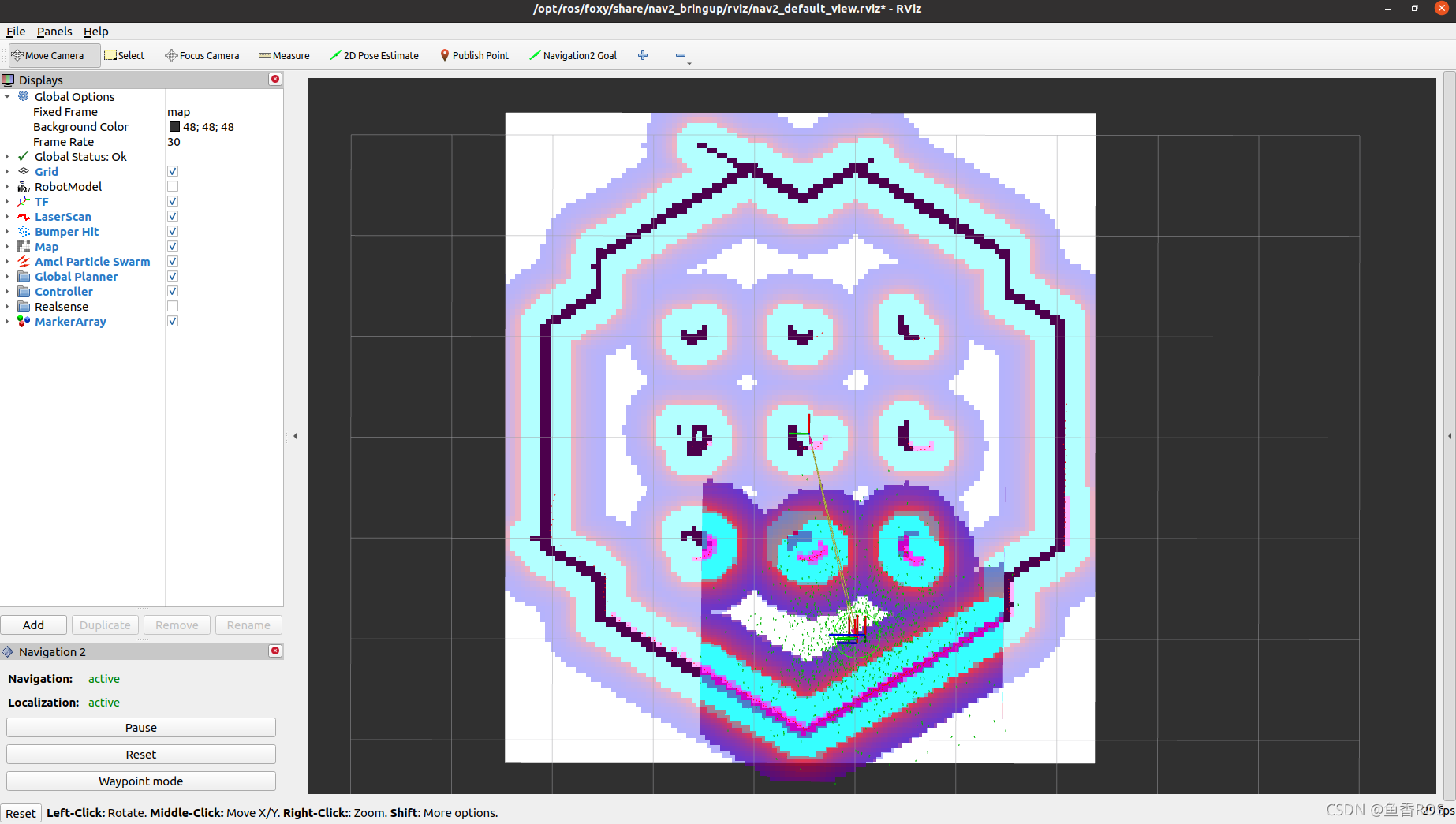
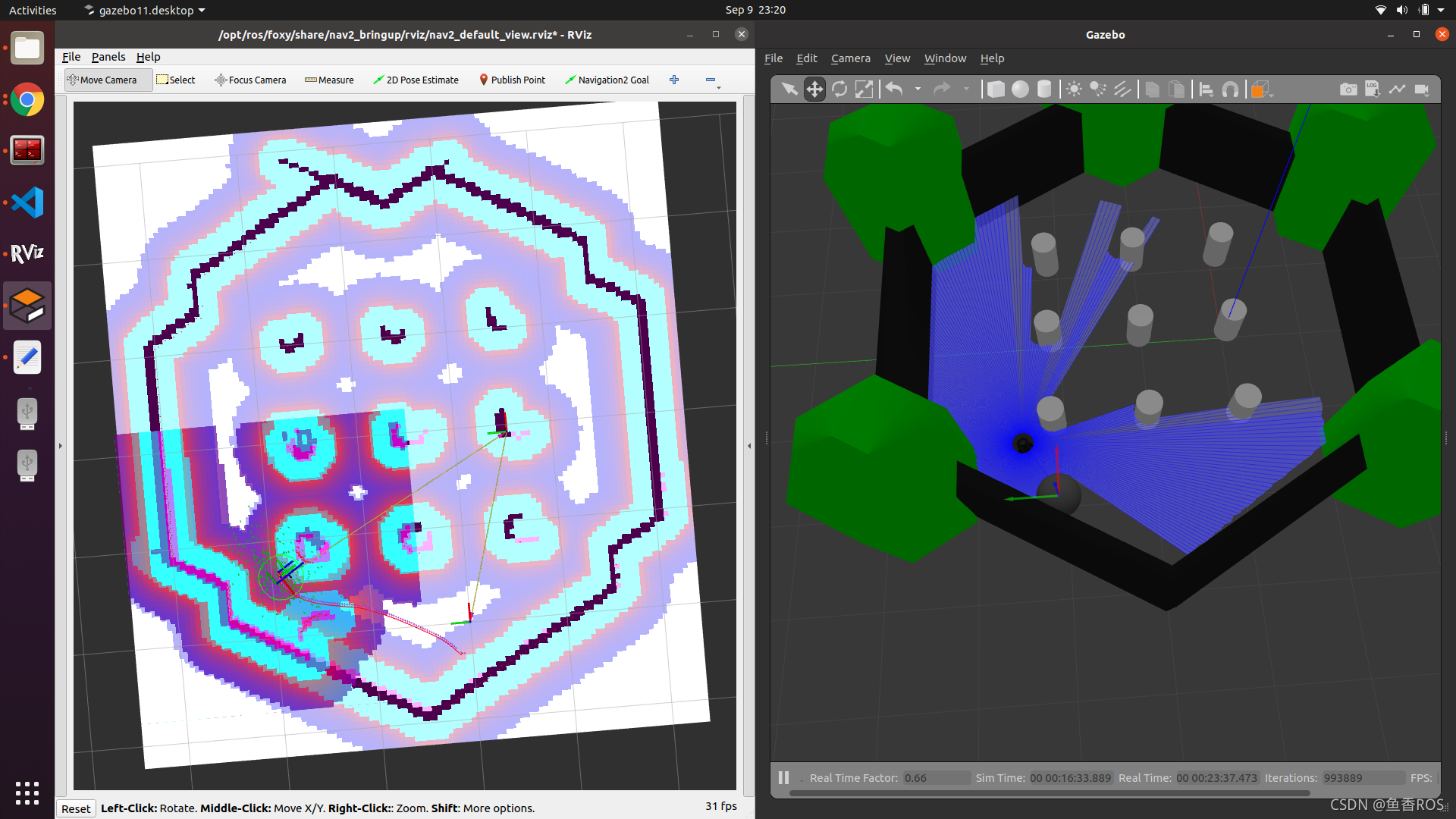
5.3 给定目标点动起来
同样使用RVIZ来操作
- 单击 2D 导航目标按钮(也位于顶部菜单中)
- 单击地图中的特定点以设置目标位置,并将光标拖动到 TurtleBot 最后应该面对的方向
绿色小箭头群是适应性蒙特卡洛定位 (AMCL)的可视化。每个绿色箭头代表机器人的可能位置和方向。请注意,在开始时,其分布分布分布在整个地图上。一旦机器人移动箭头得到更新,因为该算法纳入了新的测量。在运动过程中,箭头的分布变得不那么混乱,并越来越定居到机器人的位置,这最终意味着算法越来越确定机器人在地图中的姿势。
参考文档:
- https://ros2-industrial-workshop.readthedocs.io/en/latest/_source/navigation/ROS2-Turtlebot.html















 262
262











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









