







2.空间坐标描述实战
写在前面
- 当前平台文章汇总地址:ROS2机器人从入门到实战
- 获取完整教程及配套资料代码,请关注公众号<鱼香ROS>获取
- 教程配套机器人开发平台:两驱版| 四驱版
- 为方便交流,搭建了机器人技术问答社区:地址 fishros.org.cn
大家好,我是小鱼,上一节我们学习了坐标描述和坐标变换的理论知识,本节课我们把重点放到动手实现上,通过numpy实现坐标的描述和变换,同时结合ROS2鱼RVIZ进行坐标关系可视化与求解。
通过本节你将掌握:
- 使用numpy表示位置矢量和旋转矩阵
- 使用numpy进行平移与旋转坐标变换
- 了解ROS2中TF2的概念
- 使用tf2相关CLI工具进行坐标变换
- 使用python操作TF进行坐标变换
1.numpy表示位姿
在前几节中,小鱼带你安装使用了ROS2和MiniConda,并学习使用Numpy进行矩阵相关运算的验证。
那我们如何使用numpy中的矩阵表示位置矢量和旋转矩阵呢?
1.1 位置表示
上一节中我们使用一个3行1列的矩阵表示了位置,那么我们在numpy中自然也可以使用这样一个矩阵表示。
打开终端,输入下面指令打开jupyter
jupyter-notebook
新建一个python3的代码并重命名,接着在单元格中导入numpy
import numpy as np
1.1.1 位置矩阵
使用3*1的矩阵表示位置,我们新建一个沿着x、y、z各平移1个单位的位置矢量。
np.asarray([1.0,1.0,1.0]).reshape(3,1)
1.2 姿态表示
姿态可以使用3*3的旋转矩阵表示,3*3的单位矩阵代表没有姿态变换,注意没有姿态变换不是零矩阵,而是单位矩阵。
我们新建一个旋转矩阵,用该旋转矩阵表示绕着z轴旋转45度,可以这样写:
import math
import numpy as np
theta = math.radians(45)
R_AB = np.asarray([math.cos(theta),-math.sin(theta),0,
math.sin(theta),math.cos(theta),0,
0,0,1
]).reshape(3,3)
print(R_AB)
运行后得到的旋转矩阵是不是和上节的一样

2.numpy坐标变换
掌握了使用numpy表示位置和姿态后,接着我们使用numpy来完成上一节的小练习
2.1 题目
如图🔓示,已知:
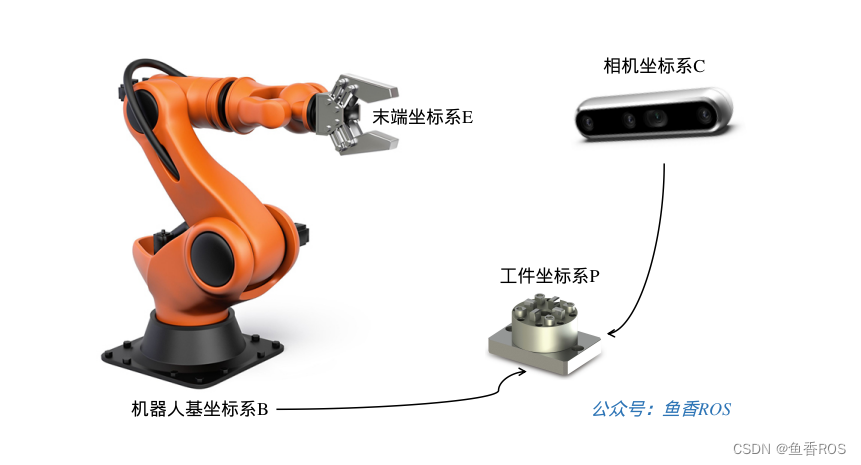
1.相机坐标系{C}为参考坐标系,工具坐标系{P}的位置矢量在相机坐标系{C}的x,y,z各轴投影为
2
,
1
,
2
2,1,2
2,1,2,并且工具坐标系和相机坐标系姿态相同。
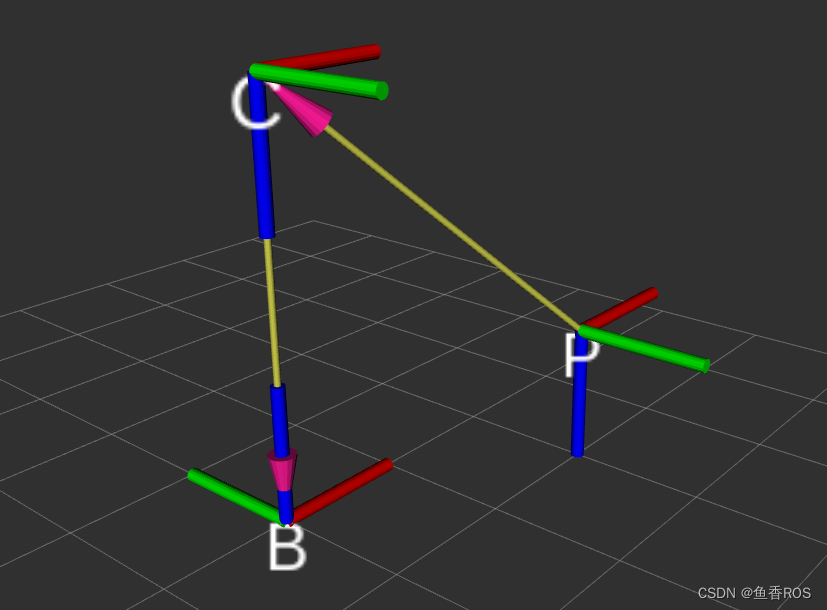
2.机器人基坐标系{B}为参考坐标系,相机坐标系{C}的位置矢量在{B}各轴的投影为 0 , 0 , 3 0,0,3 0,0,3,坐标系{C}绕着坐标系{B}的x轴转了180度
可以参考下图看题目
求:
{B}为参考坐标系,坐标系{P}的位置矢量和旋转矩阵
2.2 使用numpy求解
2.2.1 旋转矩阵求解
这里我们就需要使用复合坐标变换了,根据坐标变换规则有:
P
B
R
=
C
B
R
P
C
R
^B_PR=^B_CR^C_PR
PBR=CBRPCR
{C}和{P}姿态相同,所以
P
C
R
^C_PR
PCR是一个单位矩阵。又因为{C}绕着{B}的x旋转了180度,根据上节的重要公式2可知
$$
R(x,\theta)= \begin{bmatrix}
1 & 0 & 0\
0 & {cos\theta} & -sin\theta \
0&{sin\theta} & cos\theta \
\end{bmatrix} \tag{小鱼提示:重要方程2}
$$
所以
C
B
R
^B_CR
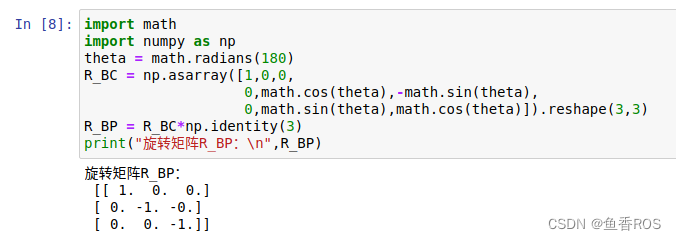
CBR对应的程序可以这样写
import math
import numpy as np
theta = math.radians(180)
R_BC = np.asarray([1,0,0,
0,math.cos(theta),-math.sin(theta),
0,math.sin(theta),math.cos(theta)]).reshape(3,3)
所以 P B R ^B_PR PBR可以用程序求得:
R_BP = R_BC*np.identity(3)
print("旋转矩阵R_BP:\n",R_BP)
2.2.2 平移矩阵求解
根据复合变换规则可知:
P
B
P
=
C
B
R
P
C
P
+
C
B
P
^B_PP=^B_CR^C_PP+^B_CP
PBP=CBRPCP+CBP
根据描述有:
C
B
P
=
[
0
,
0
,
3
]
T
^B_CP=[0,0,3]^T
CBP=[0,0,3]T、
P
C
P
=
[
2
,
1
,
2
]
T
^C_PP=[2,1,2]^T
PCP=[2,1,2]T
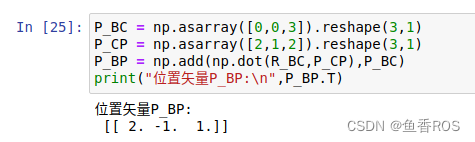
所以可以写这样写程序:
P_BC = np.asarray([0,0,3]).reshape(3,1)
P_CP = np.asarray([2,1,2]).reshape(3,1)
P_BP = np.add(np.dot(R_BC,P_CP),P_BC)
print("位置矢量P_BP:\n",P_BP.T)
运行下,可以得到结果
2.3 结果对比
与上节课答案一致
位置矢量: [ 2 , − 1 , 1 ] T [2,-1,1]^T [2,−1,1]T
旋转矩阵:
[
1
0
0
0
−
1
0
0
0
−
1
]
(小鱼提示:重要方程1)
\begin{bmatrix} 1 & 0 & 0\\ 0 & -1 & 0\\ 0 &0 & -1\\ \end{bmatrix} \tag{小鱼提示:重要方程1}
1000−1000−1
(小鱼提示:重要方程1)
以上大家跟着小鱼一起学习了使用numpy表示位置和姿态,并使用了numpy来进行坐标变换,接下来我们直接使用ROS2中的TF工具不写一行代码进行坐标发布,同时我们还可以使用RVIZ2直观的查看坐标关系。














 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









