







圆的方程通常有两种常见的形式:标准方程和一般方程。以下是这两种形式的详细说明:
1. 圆的标准方程
圆的标准方程是以圆心和半径为基础的方程。其形式为:
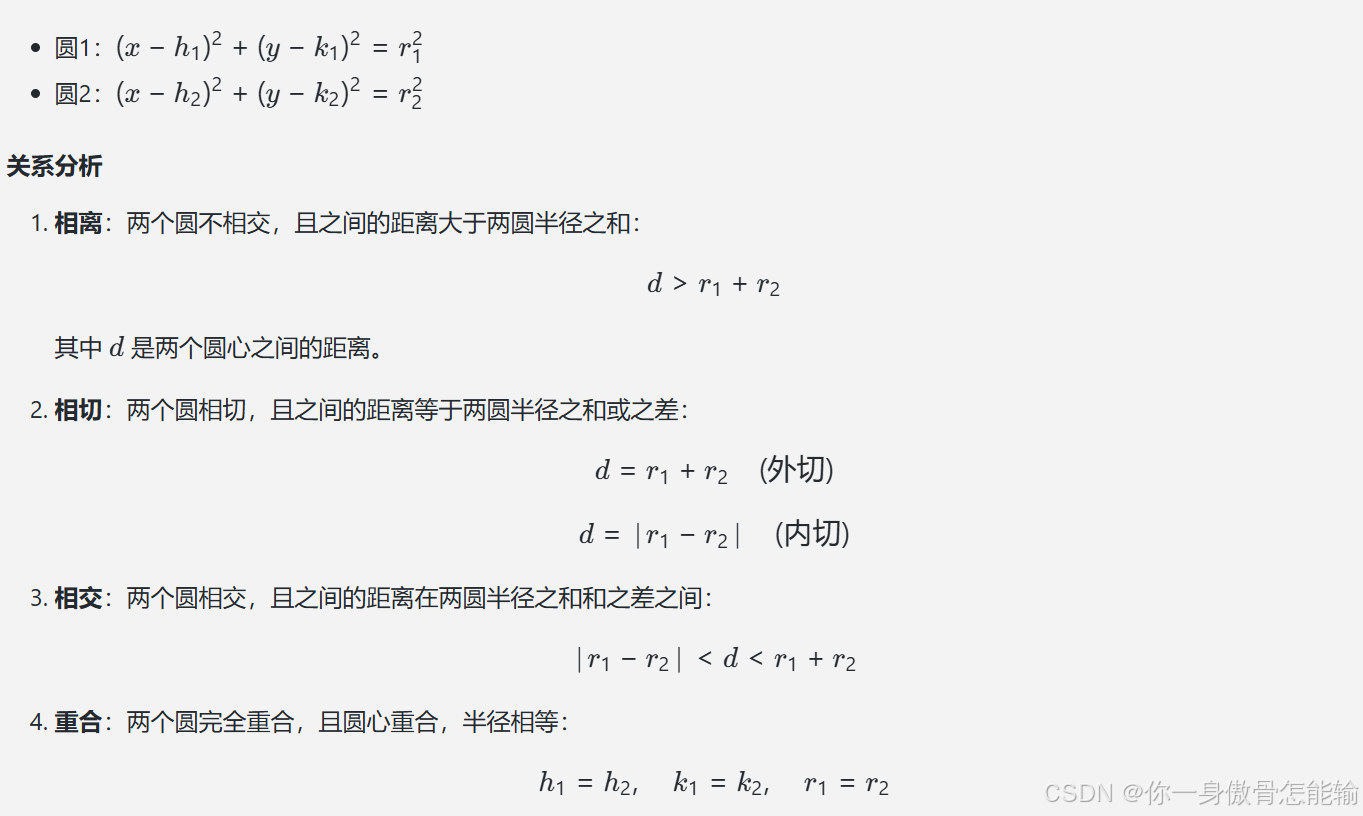
4. 圆与圆的关系
在平面几何中,两个圆之间的关系可以通过它们的方程来分析。设有两个圆的方程:
总结
圆的方程是几何学中重要的概念,理解圆的标准方程和一般方程,以及它们之间的关系,对于解决与圆相关的几何问题非常重要。
接下来我们可以深入探讨一些与圆的方程相关的应用、性质以及如何在实际问题中使用这些方程。
6. 圆的性质与应用
6.1 圆的对称性
- 关于圆心的对称性:圆是关于其圆心对称的。这意味着如果你从圆心出发,沿任意方向移动到圆的边界,再返回到圆心,最终到达的点仍然在圆上。
- 关于直径的对称性:圆的任意直径将圆分成两个完全相同的半圆。
6.2 圆的切线
7.2 圆与多边形
- 外接圆:多边形的外接圆是通过多边形的所有顶点的圆。外接圆的圆心称为外心。
- 内切圆:多边形的内切圆是与多边形的所有边相切的圆。内切圆的圆心称为内心。
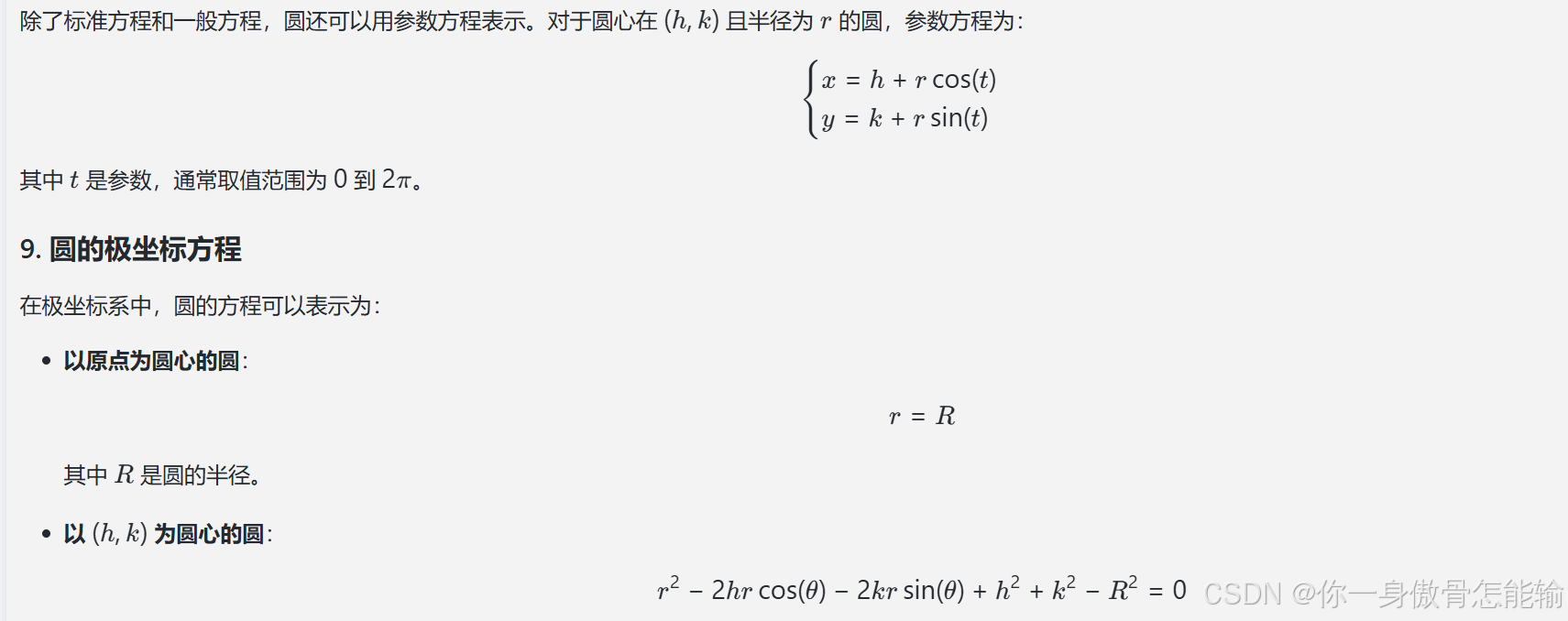
8. 圆的参数方程
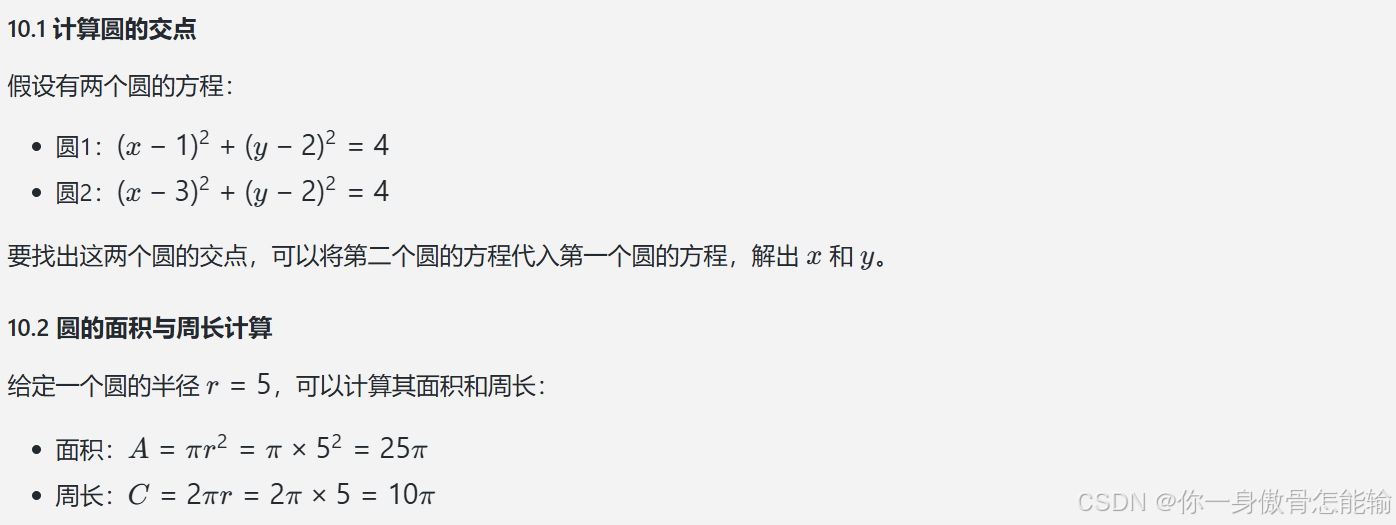
10. 圆的应用实例
总结
圆的方程及其性质在几何学中具有重要的地位,广泛应用于数学、物理、工程和计算机图形学等领域。理解圆的方程及其相关性质,不仅有助于解决几何问题,还能在实际应用中提供有效的工具。
圆的方程及其性质在游戏中都存在哪些具体应用
圆的方程及其性质在游戏开发中有许多具体应用,尤其是在物理引擎、碰撞检测、路径规划、视觉效果等方面。以下是一些具体的应用场景:
1. 碰撞检测
- 圆形碰撞体:在2D游戏中,许多物体(如角色、子弹、道具等)可以用圆形碰撞体来简化碰撞检测。通过判断两个圆的中心距离是否小于它们半径之和,可以快速判断是否发生碰撞。
- 圆与直线的碰撞:在某些情况下,物体的运动路径可以用直线表示,而目标物体是圆形的。可以通过计算直线与圆的交点来判断碰撞。
2. 视线检测
- 视野范围:在AI角色的视野检测中,可以用圆形表示角色的视野范围。通过判断目标是否在圆形区域内,可以决定角色是否能够看到目标。
- 光照效果:在光照计算中,光源的影响范围可以用圆形表示,计算光照强度和阴影效果。
3. 圆形路径
- 角色移动:在某些游戏中,角色可能沿着圆形路径移动(例如,围绕某个中心点旋转)。可以使用圆的参数方程来计算角色在不同时间点的位置。
- 旋转物体:在游戏中,某些物体(如旋转的机关、旋转的敌人等)可以用圆的方程来描述其运动轨迹。
4. 圆形区域
- 区域触发:在游戏中,可以使用圆形区域来触发事件。例如,当角色进入某个圆形区域时,可以触发特定的事件或效果(如开启宝箱、触发敌人出现等)。
- 范围技能:在角色扮演游戏(RPG)中,某些技能的影响范围可以用圆形表示,判断技能是否命中目标。
5. 圆形UI元素
- 圆形按钮:在用户界面设计中,圆形按钮或图标可以用圆的方程来定义其边界,处理用户的点击事件。
- 进度条:圆形进度条(如加载动画)可以用圆的方程来绘制,显示进度的变化。
6. 圆的几何性质
- 弦和切线:在游戏中,可能需要计算圆的弦和切线的性质。例如,判断某个点是否在圆的边界上,或者计算切线的方程。
- 圆心和半径的计算:在某些情况下,可能需要根据已知的点计算圆的圆心和半径,例如在生成随机圆形区域时。
7. 物理模拟
- 圆形物体的运动:在物理引擎中,圆形物体的运动可以用圆的方程来描述,计算物体在不同时间点的位置和速度。
- 碰撞反应:当圆形物体发生碰撞时,可以根据圆的性质计算反弹方向和速度,模拟真实的物理反应。
8. 游戏逻辑
- 区域检测:在游戏中,可以使用圆形区域来检测角色是否进入特定区域,例如通过圆的方程检测角色与触发器的交互。
- 敌人追踪:在某些游戏中,敌人可能会在一定范围内追踪玩家,可以用圆形区域来限制敌人的追踪范围。
9. 圆的动画效果
- 旋转动画:在游戏中,物体的旋转动画可以通过圆的方程来实现,计算物体在旋转过程中的位置变化。
- 粒子效果:在粒子系统中,粒子的运动轨迹可以用圆形路径来模拟,创建流动的效果。
总结
圆的方程及其性质在游戏开发中是一个基础而重要的概念,涉及到物理、碰撞、路径规划、视觉效果等多个方面。理解和应用这些性质可以帮助开发者创建更真实和有趣的游戏体验。
碰撞检测
碰撞检测是游戏开发中的一个重要环节,尤其是在2D游戏中,使用圆形碰撞体和圆与直线的碰撞检测可以有效地简化计算,提高性能。下面我们将详细探讨这两种碰撞检测方法。
1. 圆形碰撞体
1.1 碰撞检测原理
在2D空间中,圆形碰撞体的碰撞检测可以通过以下步骤实现:
-
定义圆的参数:
- 圆心 ((x_1, y_1)) 和半径 (r_1) 表示第一个圆。
- 圆心 ((x_2, y_2)) 和半径 (r_2) 表示第二个圆。
-
计算圆心之间的距离:
使用欧几里得距离公式计算两个圆心之间的距离 (d):
[
d = \sqrt{(x_2 - x_1)^2 + (y_2 - y_1)^2}
] -
判断碰撞:
如果 (d) 小于或等于两个圆的半径之和,即:
[
d \leq r_1 + r_2
]
则表示两个圆发生了碰撞。
1.2 示例代码
以下是一个简单的伪代码示例,展示如何实现圆形碰撞检测:
def check_circle_collision(circle1, circle2):
# circle1 和 circle2 是包含圆心和半径的对象
x1, y1, r1 = circle1.x, circle1.y, circle1.radius
x2, y2, r2 = circle2.x, circle2.y, circle2.radius
# 计算圆心之间的距离
dx = x2 - x1
dy = y2 - y1
distance_squared = dx * dx + dy * dy
radius_sum = r1 + r2
# 判断是否发生碰撞
if distance_squared <= radius_sum * radius_sum:
return True # 碰撞发生
return False # 没有碰撞
2. 圆与直线的碰撞
2.1 碰撞检测原理
在某些情况下,物体的运动路径可以用直线表示,而目标物体是圆形的。判断直线与圆的碰撞可以通过以下步骤实现:
-
定义直线的方程:
设直线的方程为 (y = mx + b),其中 (m) 是斜率,(b) 是截距。 -
定义圆的参数:
圆心 ((h, k)) 和半径 (r)。 -
代入直线方程:
将直线方程代入圆的方程 ((x - h)^2 + (y - k)^2 = r^2) 中,得到一个关于 (x) 的二次方程:
[
(x - h)^2 + (mx + b - k)^2 = r^2
] -
求解判别式:
将上述方程整理为标准的二次方程形式 (Ax^2 + Bx + C = 0),并计算判别式:
[
D = B^2 - 4AC
]- 如果 (D > 0),则直线与圆相交于两个点(碰撞)。
- 如果 (D = 0),则直线与圆相切(碰撞)。
- 如果 (D < 0),则直线与圆没有交点(没有碰撞)。
2.2 示例代码
以下是一个简单的伪代码示例,展示如何实现圆与直线的碰撞检测:
def check_line_circle_collision(line, circle):
# line 是包含斜率和截距的对象,circle 是包含圆心和半径的对象
m = line.slope
b = line.intercept
h, k, r = circle.x, circle.y, circle.radius
# 计算二次方程的系数
A = 1 + m * m
B = 2 * (m * (b - k) - h)
C = h * h + (b - k) * (b - k) - r * r
# 计算判别式
D = B * B - 4 * A * C
if D > 0:
return "Two points of intersection (collision)"
elif D == 0:
return "One point of intersection (tangential collision)"
else:
return "No intersection (no collision)"
总结
通过使用圆形碰撞体和圆与直线的碰撞检测方法,游戏开发者可以高效地处理碰撞检测问题。这些方法不仅简单易实现,而且在性能上也相对高效,适合用于实时游戏环境中。
视线检测
视线检测在游戏开发中是一个重要的功能,尤其是在涉及AI角色行为和光照效果时。下面我们将详细探讨这两个方面的应用。
1. 视野范围
1.1 视野检测原理
在AI角色的视野检测中,通常使用圆形来表示角色的视野范围。通过判断目标是否在这个圆形区域内,可以决定角色是否能够看到目标。
-
定义视野范围:
- 角色的视野范围可以用一个圆来表示,圆心为角色的位置,半径为视野的最大距离。
-
判断目标是否在视野范围内:
- 通过计算角色与目标之间的距离,判断该距离是否小于或等于视野半径。
1.2 示例代码
以下是一个简单的伪代码示例,展示如何实现视野范围的检测:
def is_target_in_vision(character, target):
# character 是包含角色位置和视野半径的对象
# target 是包含目标位置的对象
vision_radius = character.vision_radius
character_x, character_y = character.x, character.y
target_x, target_y = target.x, target.y
# 计算角色与目标之间的距离
distance_squared = (target_x - character_x) ** 2 + (target_y - character_y) ** 2
# 判断目标是否在视野范围内
if distance_squared <= vision_radius ** 2:
return True # 目标在视野范围内
return False # 目标不在视野范围内
1.3 视野角度
在某些情况下,视野不仅仅是一个圆形,而是一个扇形(例如,角色的前方视野)。可以通过计算目标与角色之间的角度来进一步限制视野范围。
- 计算角度:
- 使用反正切函数计算角色与目标之间的角度,并判断该角度是否在角色的视野角度范围内。
2. 光照效果
2.1 光源影响范围
在光照计算中,光源的影响范围通常用圆形表示。光源的强度和范围可以影响场景中的物体,产生不同的光照效果。
-
定义光源:
- 光源的参数包括位置(圆心)和影响半径。
-
计算光照强度:
- 根据物体与光源之间的距离,计算光照强度。通常,距离越近,光照强度越高。
2.2 示例代码
以下是一个简单的伪代码示例,展示如何实现光照效果的计算:
def calculate_light_intensity(light_source, object):
# light_source 是包含光源位置和强度的对象
# object 是包含物体位置的对象
light_x, light_y, light_radius, light_strength = light_source.x, light_source.y, light_source.radius, light_source.strength
object_x, object_y = object.x, object.y
# 计算光源与物体之间的距离
distance_squared = (object_x - light_x) ** 2 + (object_y - light_y) ** 2
# 判断物体是否在光源的影响范围内
if distance_squared <= light_radius ** 2:
# 计算光照强度,假设强度随距离的平方反比衰减
distance = distance_squared ** 0.5
intensity = light_strength / (distance + 1) # 加1避免除以0
return intensity
return 0 # 不在光源影响范围内
2.3 阴影效果
在光照计算中,阴影效果也可以通过判断物体与光源之间的相对位置来实现。通常,物体在光源与地面之间会产生阴影。
- 阴影计算:
- 通过判断物体是否在光源的直线投影下,来决定是否产生阴影。
总结
视线检测和光照效果是游戏开发中非常重要的功能。通过使用圆形表示视野范围和光源影响范围,可以有效地实现AI角色的行为逻辑和场景的光照效果。这些方法不仅简单易实现,而且在性能上也相对高效,适合用于实时游戏环境中。
视野角度
在游戏开发中,视野角度的检测是实现AI角色行为的重要部分,尤其是在需要考虑角色的朝向和视野范围时。通过将视野表示为一个扇形,可以更精确地控制角色的感知范围。下面我们将详细探讨如何计算视野角度,并判断目标是否在角色的视野范围内。
1. 视野扇形的定义
视野扇形通常由以下几个参数定义:
- 角色位置:角色的坐标 ((x, y))。
- 视野半径:角色能够看到的最大距离。
- 视野角度:角色的视野范围(例如,60度、90度等)。
- 角色朝向:角色当前面朝的方向,通常用一个角度表示。
2. 计算目标与角色之间的角度
要判断目标是否在角色的视野扇形内,可以通过以下步骤实现:
2.1 计算目标的相对位置
首先,计算目标相对于角色的位置:
def get_relative_position(character, target):
relative_x = target.x - character.x
relative_y = target.y - character.y
return relative_x, relative_y
2.2 计算角度
使用反正切函数(atan2)计算目标与角色之间的角度:
import math
def calculate_angle(relative_x, relative_y):
return math.degrees(math.atan2(relative_y, relative_x)) # 转换为度数
2.3 判断目标是否在视野范围内
接下来,判断计算出的角度是否在角色的视野范围内。可以通过以下步骤实现:
-
计算视野的边界角度:
- 角色的朝向角度加上和减去视野角度的一半,得到视野的左边界和右边界。
-
判断目标角度是否在边界内:
- 如果目标角度在左边界和右边界之间,则目标在视野范围内。
3. 示例代码
以下是一个完整的示例代码,展示如何实现视野角度的检测:
def is_target_in_field_of_view(character, target):
# character 是包含角色位置、视野半径、视野角度和朝向的对象
# target 是包含目标位置的对象
vision_radius = character.vision_radius
vision_angle = character.vision_angle # 视野角度(度数)
character_angle = character.angle # 角色朝向(度数)
# 计算目标的相对位置
relative_x, relative_y = get_relative_position(character, target)
# 计算目标与角色之间的角度
target_angle = calculate_angle(relative_x, relative_y)
# 计算视野的边界角度
left_boundary = character_angle - (vision_angle / 2)
right_boundary = character_angle + (vision_angle / 2)
# 处理角度的循环性
if left_boundary < 0:
left_boundary += 360
if right_boundary < 0:
right_boundary += 360
if left_boundary >= 360:
left_boundary -= 360
if right_boundary >= 360:
right_boundary -= 360
# 判断目标是否在视野范围内
if left_boundary < right_boundary:
return left_boundary <= target_angle <= right_boundary
else: # 处理跨越0度的情况
return target_angle >= left_boundary or target_angle <= right_boundary
# 示例角色和目标
class Character:
def __init__(self, x, y, vision_radius, vision_angle, angle):
self.x = x
self.y = y
self.vision_radius = vision_radius
self.vision_angle = vision_angle
self.angle = angle
class Target:
def __init__(self, x, y):
self.x = x
self.y = y
# 使用示例
character = Character(x=0, y=0, vision_radius=10, vision_angle=90, angle=0) # 角色朝向0度
target = Target(x=5, y=5) # 目标位置
if is_target_in_field_of_view(character, target):
print("目标在视野范围内")
else:
print("目标不在视野范围内")
总结
通过将视野表示为一个扇形,并计算目标与角色之间的角度,可以有效地判断目标是否在角色的视野范围内。这种方法不仅提高了AI角色的智能性,还能增强游戏的沉浸感和真实感。如果你有其他问题或需要更深入的讨论,请随时告诉我!



















 2016
2016

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











