







摘要
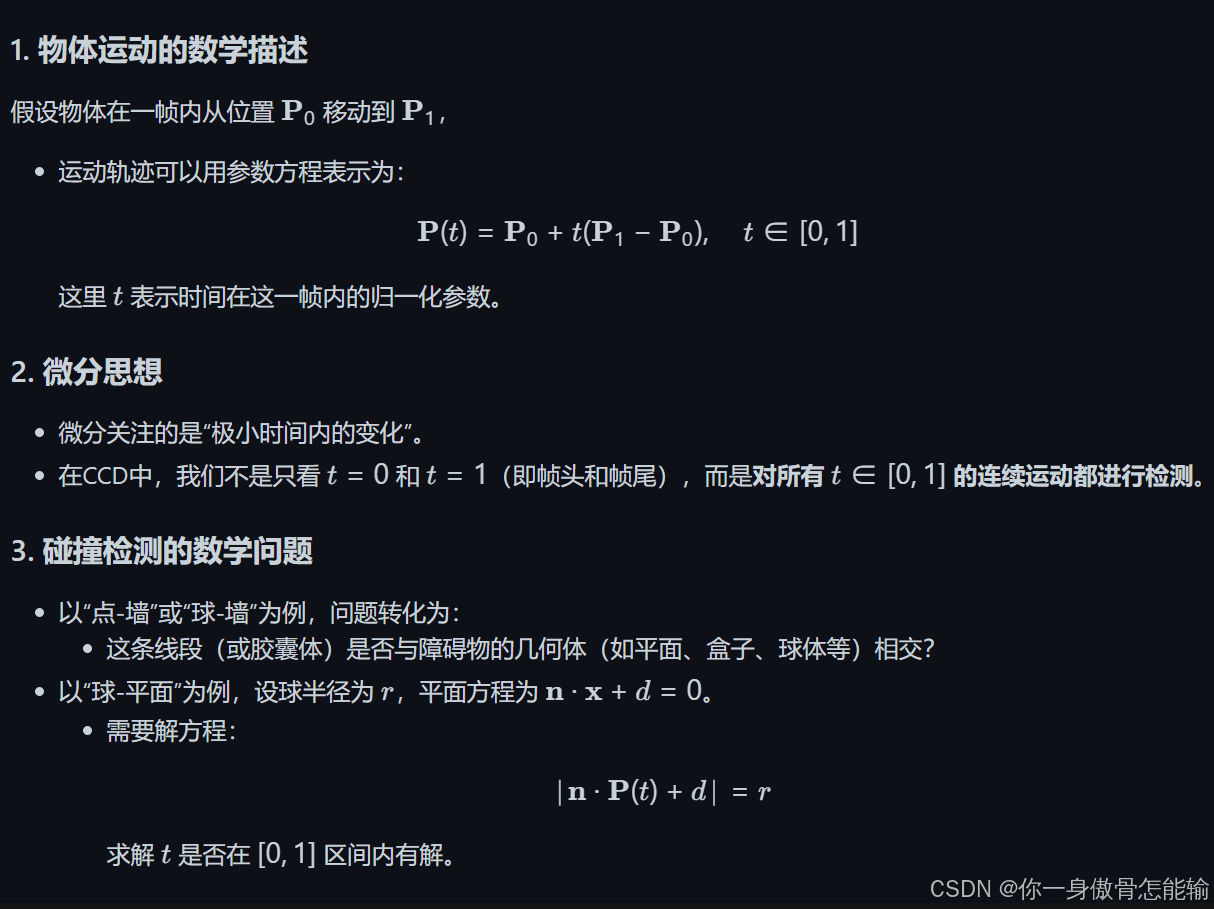
连续碰撞检测(CCD)通过微分思想,将物体在极短时间内的运动轨迹视为连续路径,而非离散的两点。与普通检测相比,CCD能够更准确地判断物体是否在一帧内穿越障碍物,避免高速物体“穿墙”等问题。其核心在于计算物体从起点到终点的运动线段,并检测该线段是否与障碍物相交。数学上,CCD通过参数方程描述运动轨迹,并求解交点,体现了微分思想在数值模拟中的应用。在游戏开发中,CCD通过射线、胶囊等检测方法,确保高速运动的物体能够被准确捕捉,提升碰撞检测的精度。
一、生活化比喻
1. 离散检测(普通检测)像什么?
想象你在玩“红灯绿灯”游戏,每次睁眼只看一下小朋友们的位置。如果有个小朋友跑得特别快,他可能在你睁眼的两次之间,已经从起点直接冲到了终点,中间你根本没看到他经过。
2. 连续检测(CCD)像什么?
现在你换了个方法:你在两次睁眼之间,想象小朋友是沿着一条直线跑过去的。你会问:“他是不是在这条直线上穿过了某个禁止区域?”
这样,即使他跑得再快,你也能发现他是不是“穿越”了不该去的地方。
二、微分思想在CCD中的应用
1. 微分思想是什么?
- 微分关注的是“极小时间内的变化”。
- 在CCD中,我们不只关心物体在某一帧的起点和终点,而是关心这段极小时间内它的整个运动轨迹。
2. 形象解释
- 你把物体的运动轨迹想象成一条线段(比如子弹从A点飞到B点)。
- CCD会检查:这条线段有没有和障碍物相交?
- 这就像用放大镜看物体在极短时间内的“连续移动”,而不是只看“快照”。
三、原理简述
-
普通碰撞检测
只在每一帧的起点和终点检测物体是否重叠,可能漏掉高速穿越的情况。 -
连续碰撞检测(CCD)
- 计算物体在一帧内的“连续路径”(比如一条直线)。
- 检查这条路径是否与障碍物相交。
- 这就是用微分思想,把“离散的两点”变成“连续的运动轨迹”。
四、举个游戏中的例子
子弹穿墙问题
-
普通检测:
子弹每帧移动很远,上一帧在墙外,这一帧在墙内,检测不到碰撞,子弹穿墙了。 -
CCD检测:
计算子弹从上一帧到这一帧的“运动线段”,判断这条线段是否和墙相交。
如果相交,就能准确检测到碰撞,防止穿墙。
五、简单代码/伪代码示意
// 伪代码
Vector3 start = lastPosition;
Vector3 end = currentPosition;
// 检查从start到end的线段是否与障碍物相交
if (LineSegmentIntersectsObstacle(start, end, obstacle)) {
// 发生了连续碰撞
// 处理碰撞响应
}
六、总结一句话
连续碰撞检测(CCD)就像用放大镜看物体在极短时间内的“连续移动”,用微分思想把“快照”变成“运动轨迹”,从而准确判断物体是否在一帧内穿越了障碍!
下面我们用更数学化的原理和具体实现细节来解释连续碰撞检测(CCD)中微分思想的应用。
一、数学化原理
二、具体实现细节
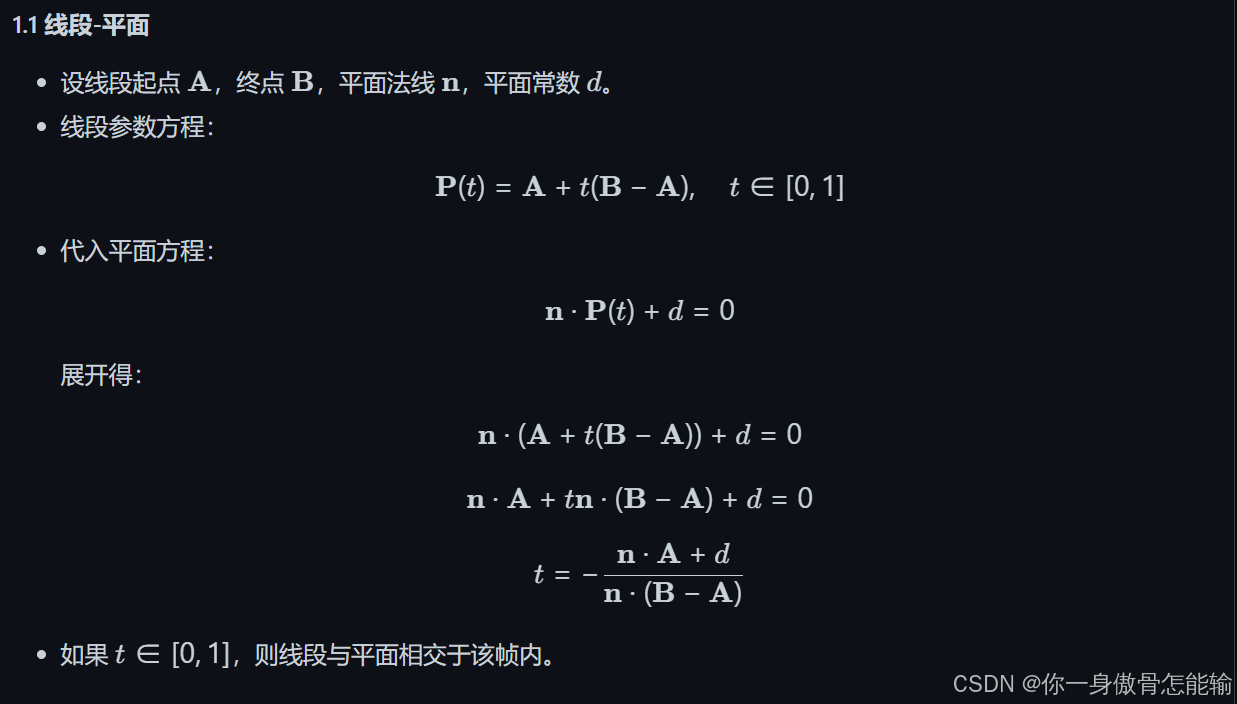
1. 线段-障碍物相交检测
1.2 线段-球体/盒体
- 线段与球体的相交可转化为求解二次方程,判断是否有实根且根在 ([0,1]) 区间内。
- 线段与AABB(轴对齐包围盒)的相交可用“分离轴定理”或“射线盒体相交”算法。
2. 胶囊体(Capsule)检测
- 对于有体积的物体(如球、胶囊),实际检测的是物体在运动过程中“扫过”的体积。
- 这可以转化为“胶囊体-障碍物”相交检测。
3. 代码实现(伪代码)
以“点-平面”为例:
// 线段起点A,终点B,平面法线n,平面常数d
Vector3 AB = B - A;
float denom = Vector3.Dot(n, AB);
if (Mathf.Abs(denom) > 1e-6) { // 不平行
float t = -(Vector3.Dot(n, A) + d) / denom;
if (t >= 0 && t <= 1) {
Vector3 intersection = A + t * AB;
// intersection为碰撞点
}
}
4. 物理引擎中的CCD实现
- Unity、Unreal等引擎通常提供如
Physics.Raycast、Physics.CapsuleCast、Physics.SphereCast等API。 - 这些API本质上就是在一帧内用“射线”或“胶囊”沿运动方向“扫”过去,检测是否与障碍物相交。
三、微分思想的体现
- 传统检测只看“离散的两点”,而CCD用参数 (t) 把运动“连续化”,
- 检查整个运动区间内的所有可能碰撞点,这就是微分思想在数值模拟中的体现。
四、进阶:高阶运动与非线性轨迹
- 如果物体运动不是匀速直线,而是有加速度(如抛物线),
- 运动方程变为二次或更高阶多项式,
- 需要解更高阶的方程,原理类似,但计算更复杂。
五、总结
- CCD的数学本质是:在极小时间区间内,连续地检测物体运动轨迹与障碍物的交点。
- 这用到了微分思想,把离散的帧间运动“填满”,避免高速穿透。
- 实现上就是用参数方程描述运动轨迹,解方程找交点。



















 1559
1559

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











