







光线追踪(Ray Tracing)
光线追踪是一种先进的渲染技术,广泛应用于需要高质量视觉效果的领域。它通过模拟光线在场景中的传播和交互,生成高度真实的图像。以下是对光线追踪的详细介绍,包括其原理、优缺点和应用场景。
原理
光线追踪的基本原理是模拟光线在场景中的传播和交互。其具体过程可以分为以下几个步骤:
-
光线发射:
- 从摄像机(观察者)的位置向场景发射光线。每个光线代表一个像素的视线。
-
交互计算:
- 计算光线与场景中物体的交点。通过求解光线方程与物体几何体的交点,确定光线是否与物体相交。
- 如果光线与多个物体相交,通常会选择距离摄像机最近的交点。
-
光照计算:
- 一旦确定了交点,接下来需要计算该点的颜色。这包括:
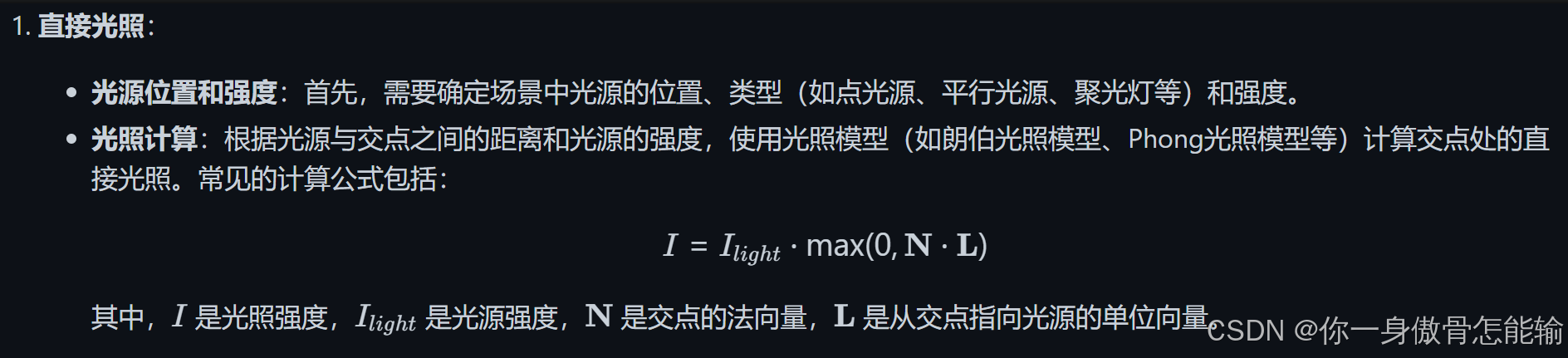
- 直接光照:根据光源的位置和强度,计算光线在交点处的直接光照。
- 阴影:判断光线是否被其他物体遮挡,以确定该点是否在阴影中。
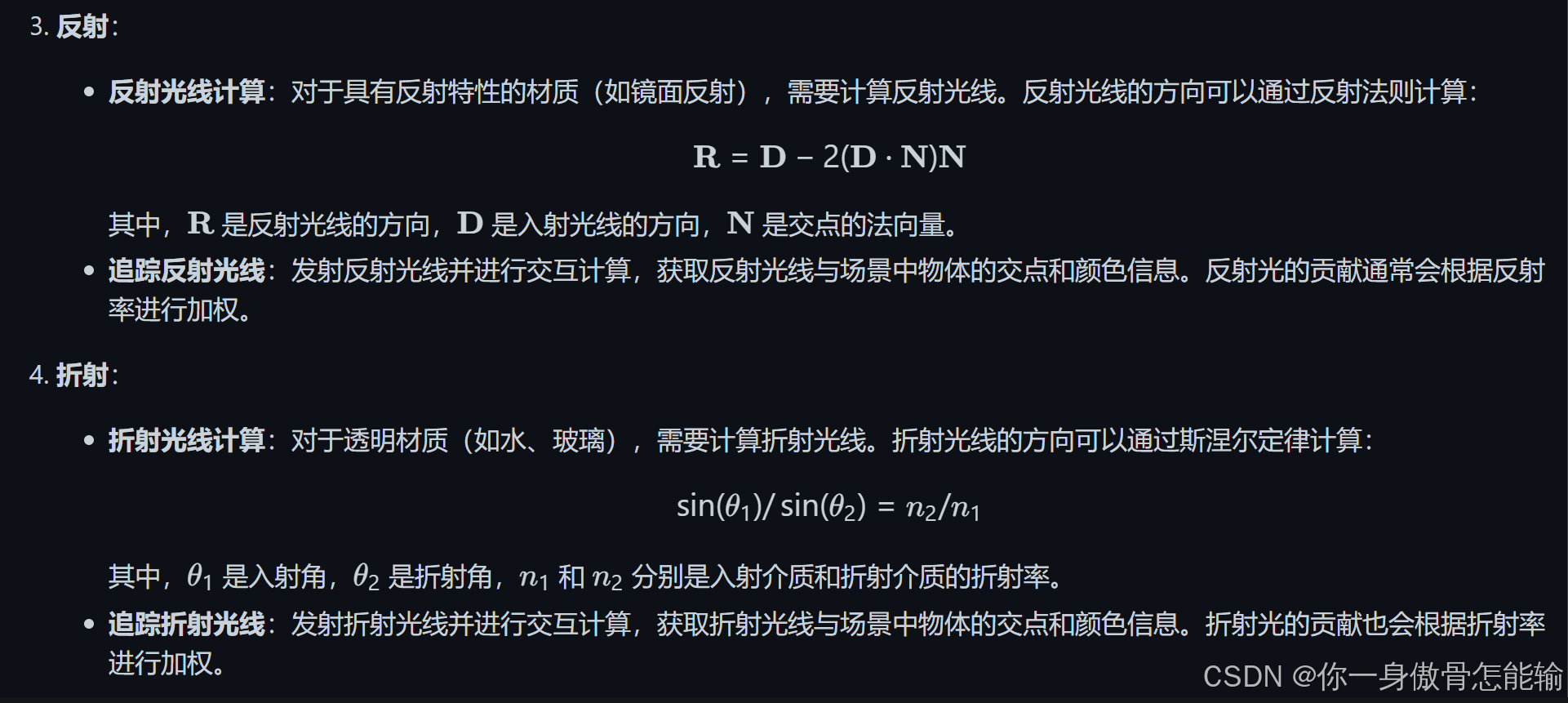
- 反射:计算反射光线,追踪反射光线与场景中物体的交互,以获取反射效果。
- 折射:对于透明材质,计算折射光线,模拟光线通过物体时的折射效果。
- 一旦确定了交点,接下来需要计算该点的颜色。这包括:
通过以上步骤,光线追踪能够生成非常真实的图像,展现出复杂的光照效果。
优点
-
真实感:
- 光线追踪能够生成非常真实的阴影、反射和折射效果,适合需要高质量渲染的场景。它能够模拟光的物理行为,使得渲染结果更接近现实。
-
物理准确性:
- 光线追踪能够更准确地模拟光的行为,提供更自然的光照效果。这使得它在处理复杂的光学现象(如透明物体、镜面反射等)时表现优异。
缺点
-
计算量大:
- 光线追踪的计算复杂度高,通常需要大量的计算资源。每个像素的颜色计算可能涉及多次光线发射和交互计算,因此在处理复杂场景时,计算量会显著增加。
-
渲染速度慢:
- 由于计算量大,光线追踪的渲染速度通常较慢,尤其是在实时应用中仍然面临性能挑战。尽管现代硬件(如GPU)正在改善这一点,但在高分辨率和复杂场景下,实时光线追踪仍然是一个挑战。
应用场景
光线追踪广泛应用于以下领域:
-
电影特效:
- 在电影制作中,光线追踪被用于生成高质量的视觉特效,能够实现复杂的光照和反射效果。
-
动画制作:
- 动画电影中,光线追踪能够提供更真实的场景和角色表现,提升观众的沉浸感。
-
建筑可视化:
- 在建筑设计中,光线追踪可以用于创建逼真的建筑效果图,帮助客户更好地理解设计意图。
-
产品渲染:
- 在产品设计和广告中,光线追踪能够生成高质量的产品图像,展示产品的细节和材质。
总结
光线追踪是一种强大的渲染技术,能够生成高度真实的图像,适合需要高质量渲染的应用场景。尽管其计算复杂度高、渲染速度慢,但随着技术的进步,光线追踪在实时渲染中的应用前景依然广阔。随着硬件性能的提升和算法的优化,光线追踪将越来越多地被应用于游戏、虚拟现实和其他交互式应用中。
光线发射
光线发射是光线追踪渲染过程中的第一步,关键在于从摄像机(观察者)的位置向场景发射光线。以下是这一过程的详细说明:
-
摄像机模型:
- 摄像机在光线追踪中通常被视为一个具有特定视野和分辨率的模型。它的视野决定了可以看到的场景范围,而分辨率则决定了最终图像的像素数量。
-
像素与光线:
- 每个像素代表图像中的一个点。为了生成图像,光线追踪算法会为每个像素发射一条光线。这些光线从摄像机的位置出发,穿过视锥体,进入场景。
-
光线的方向:
- 光线的方向通常由摄像机的视角和像素在图像平面上的位置决定。通过将像素坐标转换为三维空间中的方向向量,算法可以确定光线的发射方向。
-
视锥体:
- 光线发射的过程涉及到视锥体的概念。视锥体是一个三维空间中的区域,定义了摄像机可以看到的所有点。光线会在这个区域内发射,确保只渲染可见的物体。
-
光线的发射:
- 在实际操作中,光线通常以一定的步长(例如,像素的中心点)发射。每条光线会穿过场景,直到与物体相交或达到某个最大距离。
-
多重采样:
- 为了提高图像质量,光线追踪中常常使用多重采样技术。即在每个像素位置发射多条光线(例如,随机偏移),以减少锯齿状边缘和提高抗锯齿效果。
总结
光线发射是光线追踪的起始步骤,通过从摄像机向场景发射光线,算法能够捕捉到场景中的光照和颜色信息。这一过程为后续的交互计算和光照计算奠定了基础,确保生成的图像能够真实地反映场景的视觉效果。
交互计算
交互计算是光线追踪过程中的关键步骤,主要负责确定光线与场景中物体的交点。以下是这一过程的详细说明:
-
光线方程:
- 光线可以用参数方程表示,通常形式为:
[
\mathbf{R}(t) = \mathbf{O} + t \cdot \mathbf{D}
]
其中,(\mathbf{R}(t)) 是光线在三维空间中的位置,(\mathbf{O}) 是光线的起点(摄像机位置),(\mathbf{D}) 是光线的方向向量,(t) 是一个非负参数,表示光线沿着方向向量的延伸距离。
- 光线可以用参数方程表示,通常形式为:
-
物体几何体的表示:
- 场景中的物体通常用几何体(如球体、平面、三角形等)来表示。每种几何体都有其特定的数学方程,用于描述其形状和位置。
-
求解交点:
- 交互计算的核心是求解光线方程与物体几何体方程的交点。不同的几何体有不同的求解方法:
- 球体:通过将光线方程代入球体方程,求解二次方程。
- 平面:通过将光线方程代入平面方程,求解线性方程。
- 三角形:通常使用射线与三角形的重心坐标法或边界法进行求解。
- 交互计算的核心是求解光线方程与物体几何体方程的交点。不同的几何体有不同的求解方法:
-
交点的确定:
- 在计算过程中,可能会有多条光线与多个物体相交。为了确定光线与场景中物体的交点,算法会比较所有交点的距离,选择距离摄像机最近的交点。这是因为我们关心的是可见的物体,而不是被其他物体遮挡的部分。
-
交点信息:
- 一旦确定了交点,算法会记录该交点的位置、法向量(用于光照计算)以及与物体的材质属性(如颜色、反射率等)。这些信息将在后续的光照计算中使用。
-
加速结构:
- 为了提高交互计算的效率,尤其是在复杂场景中,通常会使用加速结构(如包围盒层次结构(BVH)、八叉树、网格等)来减少光线与物体的交互计算次数。这些结构可以快速排除不相交的物体,从而加快计算速度。
总结
交互计算是光线追踪中至关重要的一步,通过计算光线与场景中物体的交点,算法能够确定哪些物体是可见的,并为后续的光照计算提供必要的信息。通过有效的求解方法和加速结构,交互计算能够在复杂场景中保持高效性,为生成真实感图像奠定基础。
光照计算
光照计算是光线追踪渲染过程中的重要步骤,负责确定交点的颜色和光照效果。这个过程通常包括以下几个方面:
- 阴影:
- 阴影检测:为了判断交点是否在阴影中,需要从交点向光源发射一条光线。如果这条光线与场景中的其他物体相交,则说明交点被遮挡,处于阴影中。
- 阴影效果:如果交点在阴影中,直接光照的贡献将被减少或完全消失,通常可以通过将光照强度乘以一个阴影因子(如0)来实现。
- 合成颜色:
- 最后,将直接光照、反射光照和折射光照的结果合成,得到交点的最终颜色。合成时可以考虑材质的属性(如漫反射、镜面反射、透明度等)来调整各个光照成分的权重。
总结
光照计算是光线追踪中至关重要的一步,通过计算直接光照、阴影、反射和折射等因素,算法能够生成真实感的图像。每个步骤都涉及到复杂的数学计算和光学原理,确保最终渲染的图像能够准确地反映场景的光照效果和材质特性。
光线追踪算法c#代码实现
下面是一个简单的光线追踪算法的C#实现示例。这个示例将创建一个基本的场景,其中包含一个球体和一个光源,并使用光线追踪来渲染图像。为了简化代码,示例将使用控制台应用程序输出图像的像素值。
C# 光线追踪示例代码
using System;
using System.Drawing;
class Program
{
static void Main()
{
int width = 800;
int height = 600;
Bitmap bitmap = new Bitmap(width, height);
// 定义球体
Vector3 sphereCenter = new Vector3(0, 0, -5);
float sphereRadius = 1.0f;
// 定义光源
Vector3 lightPosition = new Vector3(5, 5, 0);
Color lightColor = Color.White;
// 渲染图像
for (int y = 0; y < height; y++)
{
for (int x = 0; x < width; x++)
{
// 计算光线方向
float nx = (float)(x - width / 2) / (width / 2);
float ny = (float)(height / 2 - y) / (height / 2);
Vector3 rayDirection = new Vector3(nx, ny, -1).Normalize();
// 检查光线与球体的交点
if (IntersectRaySphere(new Ray(new Vector3(0, 0, 0), rayDirection), sphereCenter, sphereRadius, out float t))
{
// 计算交点
Vector3 hitPoint = rayDirection * t;
Vector3 normal = (hitPoint - sphereCenter).Normalize();
// 计算光照
Vector3 lightDir = (lightPosition - hitPoint).Normalize();
float brightness = Math.Max(0, Vector3.Dot(normal, lightDir));
// 设置像素颜色
Color pixelColor = Color.FromArgb((int)(brightness * lightColor.R), (int)(brightness * lightColor.G), (int)(brightness * lightColor.B));
bitmap.SetPixel(x, y, pixelColor);
}
else
{
// 背景颜色
bitmap.SetPixel(x, y, Color.Black);
}
}
}
// 保存图像
bitmap.Save("output.png");
Console.WriteLine("Image saved as output.png");
}
static bool IntersectRaySphere(Ray ray, Vector3 center, float radius, out float t)
{
Vector3 oc = ray.Origin - center;
float a = Vector3.Dot(ray.Direction, ray.Direction);
float b = 2.0f * Vector3.Dot(oc, ray.Direction);
float c = Vector3.Dot(oc, oc) - radius * radius;
float discriminant = b * b - 4 * a * c;
if (discriminant < 0)
{
t = 0;
return false; // 没有交点
}
else
{
t = (-b - (float)Math.Sqrt(discriminant)) / (2.0f * a);
return true; // 有交点
}
}
}
public struct Vector3
{
public float X, Y, Z;
public Vector3(float x, float y, float z)
{
X = x;
Y = y;
Z = z;
}
public static Vector3 operator -(Vector3 a, Vector3 b) => new Vector3(a.X - b.X, a.Y - b.Y, a.Z - b.Z);
public static Vector3 operator *(Vector3 a, float b) => new Vector3(a.X * b, a.Y * b, a.Z * b);
public static float Dot(Vector3 a, Vector3 b) => a.X * b.X + a.Y * b.Y + a.Z * b.Z;
public Vector3 Normalize()
{
float length = (float)Math.Sqrt(X * X + Y * Y + Z * Z);
return new Vector3(X / length, Y / length, Z / length);
}
}
public class Ray
{
public Vector3 Origin { get; }
public Vector3 Direction { get; }
public Ray(Vector3 origin, Vector3 direction)
{
Origin = origin;
Direction = direction.Normalize();
}
}
代码说明
-
Vector3 结构:表示三维向量,包含基本的向量运算(如减法、标量乘法和点积)以及归
-
Ray 类:表示光线,包含光线的起点和方向。光线的方向在构造时被归一化,以确保后续计算的准确性。
-
IntersectRaySphere 方法:用于检测光线与球体的交点。该方法使用了求解二次方程的方式来判断光线是否与球体相交,并返回交点的参数
t。如果discriminant小于零,表示光线与球体没有交点;如果大于或等于零,则计算出交点。 -
主渲染循环:
- 遍历每个像素,计算从摄像机(原点)发出的光线方向。
- 调用
IntersectRaySphere方法检查光线是否与球体相交。 - 如果相交,计算交点的法线,并根据光源的位置计算光照强度。
- 根据光照强度设置像素颜色。
- 如果没有交点,则将像素设置为背景色(黑色)。
-
保存图像:使用
Bitmap类将生成的图像保存为 PNG 文件。
扩展和改进建议
-
多球体支持:可以扩展代码以支持多个球体或其他几何体(如平面、立方体等)。可以使用列表或数组来存储多个物体,并在渲染时检查每个物体的交点。
-
更复杂的光照模型:可以实现更复杂的光照模型,例如 Phong 或 Blinn-Phong 模型,以获得更真实的光照效果。
-
阴影处理:可以添加阴影处理功能,通过从交点向光源发射光线来检查是否被其他物体遮挡。
-
反射和折射:可以实现反射和折射效果,模拟光线在表面反射或穿透透明物体的行为。
-
抗锯齿:可以实现抗锯齿技术,通过对每个像素进行多次采样并平均结果来提高图像质量。
-
加速结构:对于复杂场景,可以使用加速结构(如 BVH 或 KD 树)来提高光线与物体的交互效率。
-
多线程渲染:可以使用多线程来加速渲染过程,特别是在处理高分辨率图像时。
总结
这个简单的光线追踪示例展示了光线追踪的基本原理和实现方式。虽然它是一个基础版本,但可以作为更复杂的光线追踪渲染器的起点。通过逐步添加更多功能和优化,您可以创建一个功能更强大的光线追踪应用程序。



















 2237
2237

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











