







有些功能包launch以后只能打开gazebo,不能进行rviz的显示,下面展示如何将rviz写入launch文件,则以后launch的时候直接就能够在rviz中显示。
首先,launch一下,如
roslaunch mrobot_gazebo view_mrobot_with_camera_gazebo.launch
然后打开了一系列节点,信息(topic)开始流动。
这时候在命令行输入
rosrun rviz rviz
可以打开rviz,在此界面ADD 一个RobotModel 并更改fixed frame,则可以实现机器人模型的显示,如下图
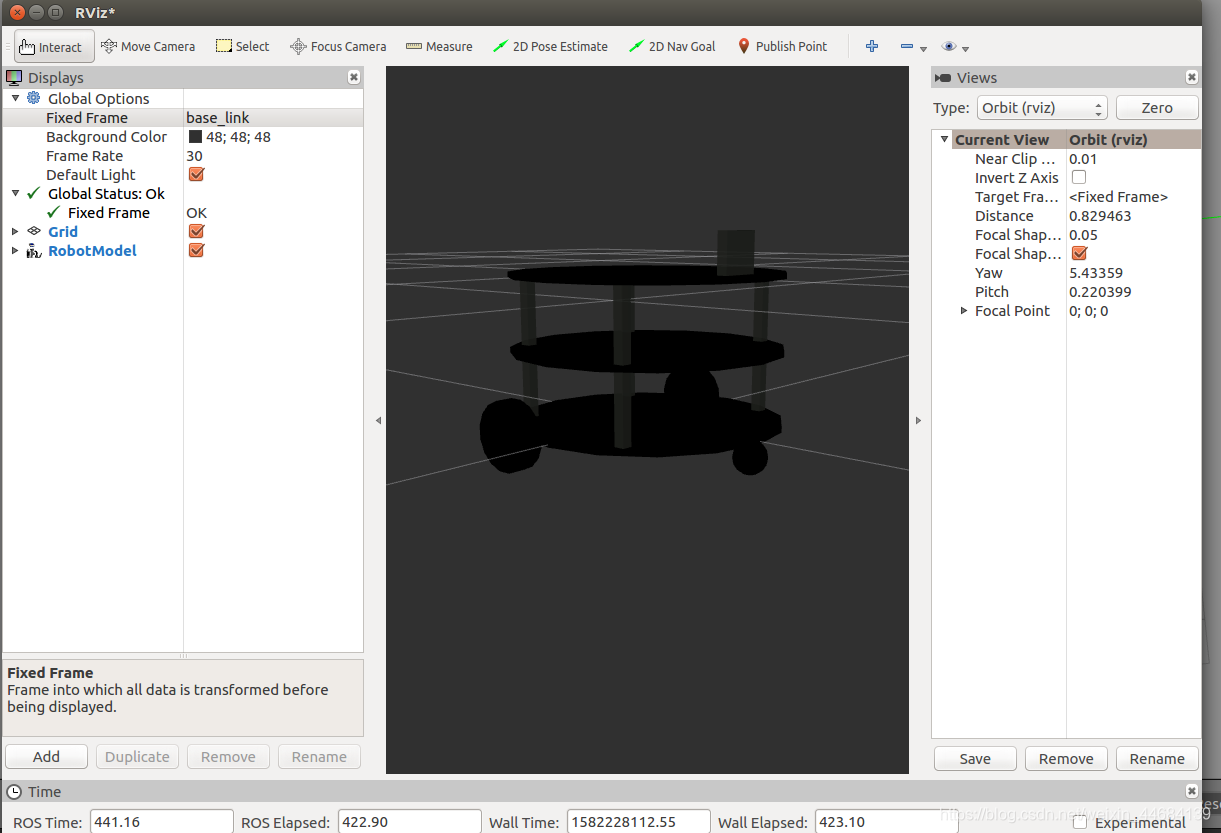
颜色之所以是黑色是因为urdf中设置的就是黑色。
接下来:
点击左上角File -> Save Config as
(如果找不到File则最大化窗口)
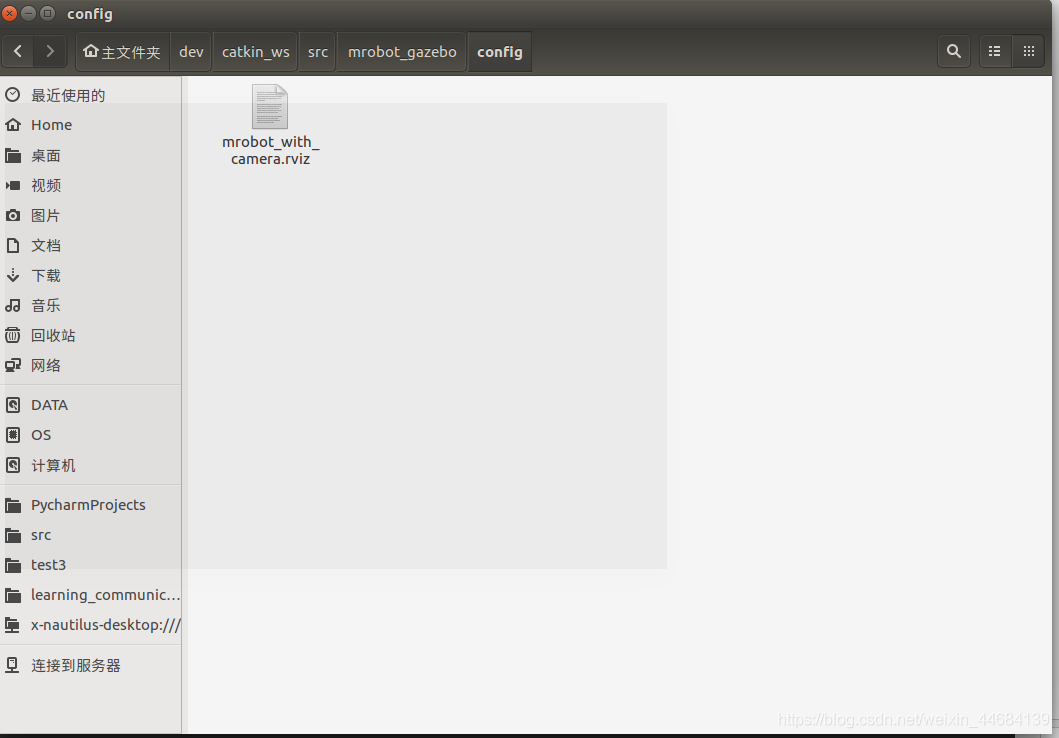
另存为到软件包中的config文件夹下,文件名自己随便设定
结果如下
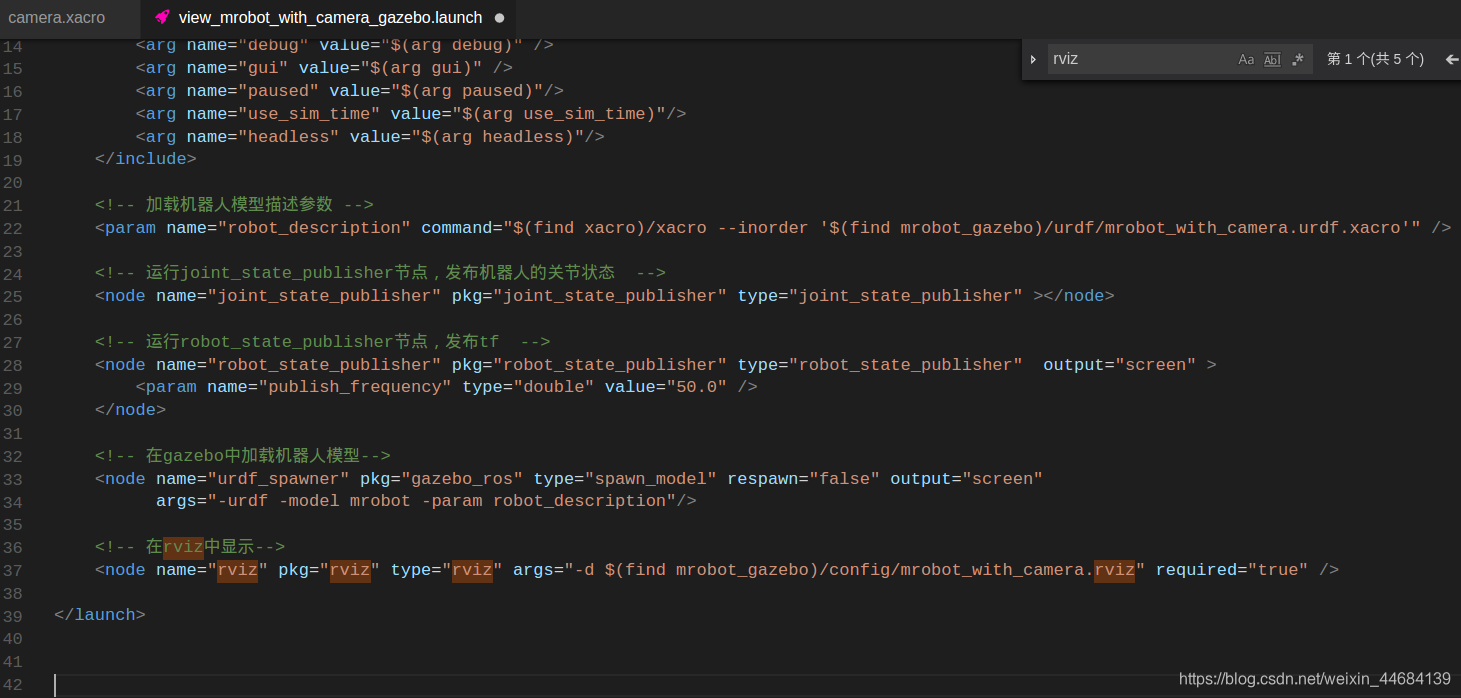
然后在你原本的launch文件最后加入运行rviz的语句
<!-- 在rviz中显示-->
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find mrobot_gazebo)/config/mrobot_with_camera.rviz" required="true" />
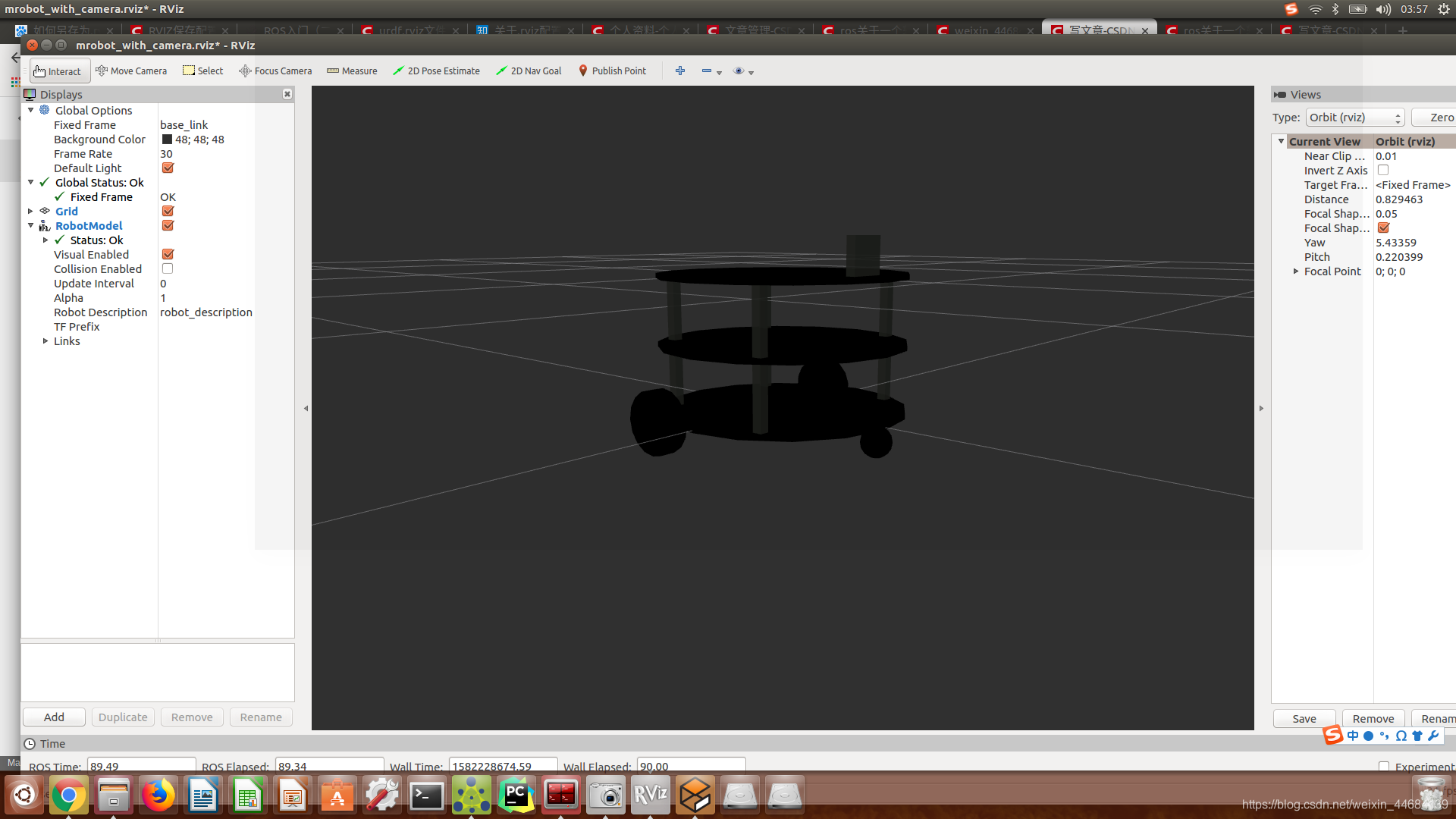
最后结果
然后测试一下
测试成功!!!!!!!!!

















 2239
2239

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









