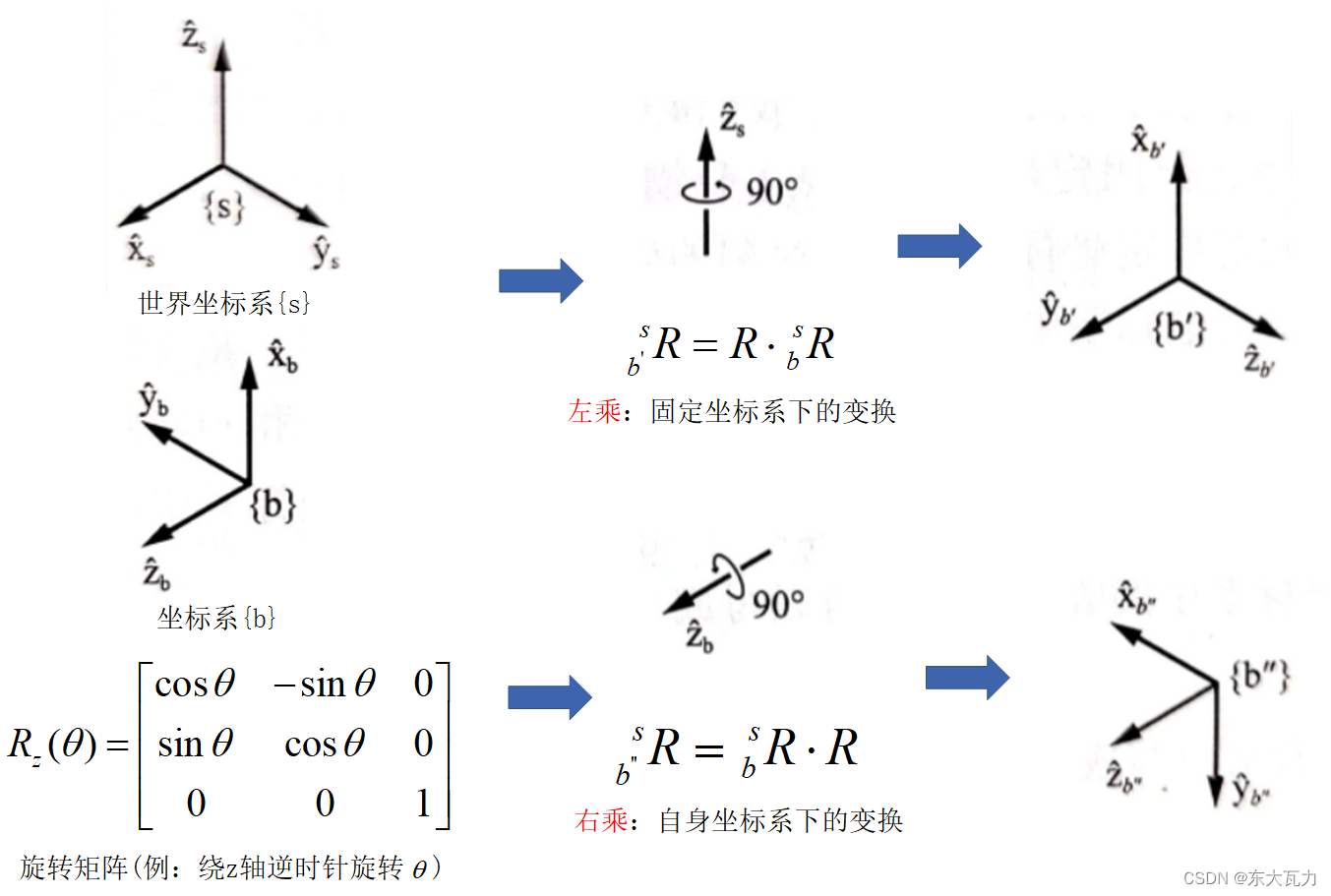
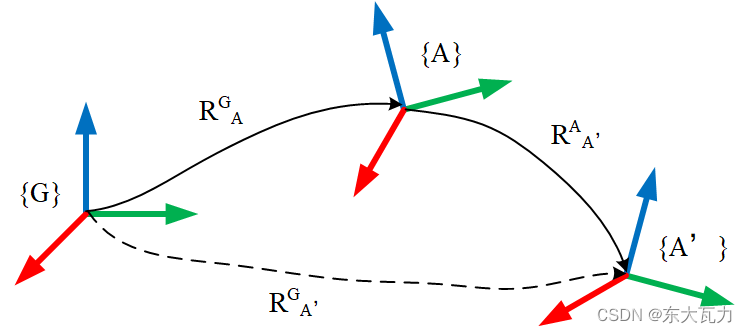
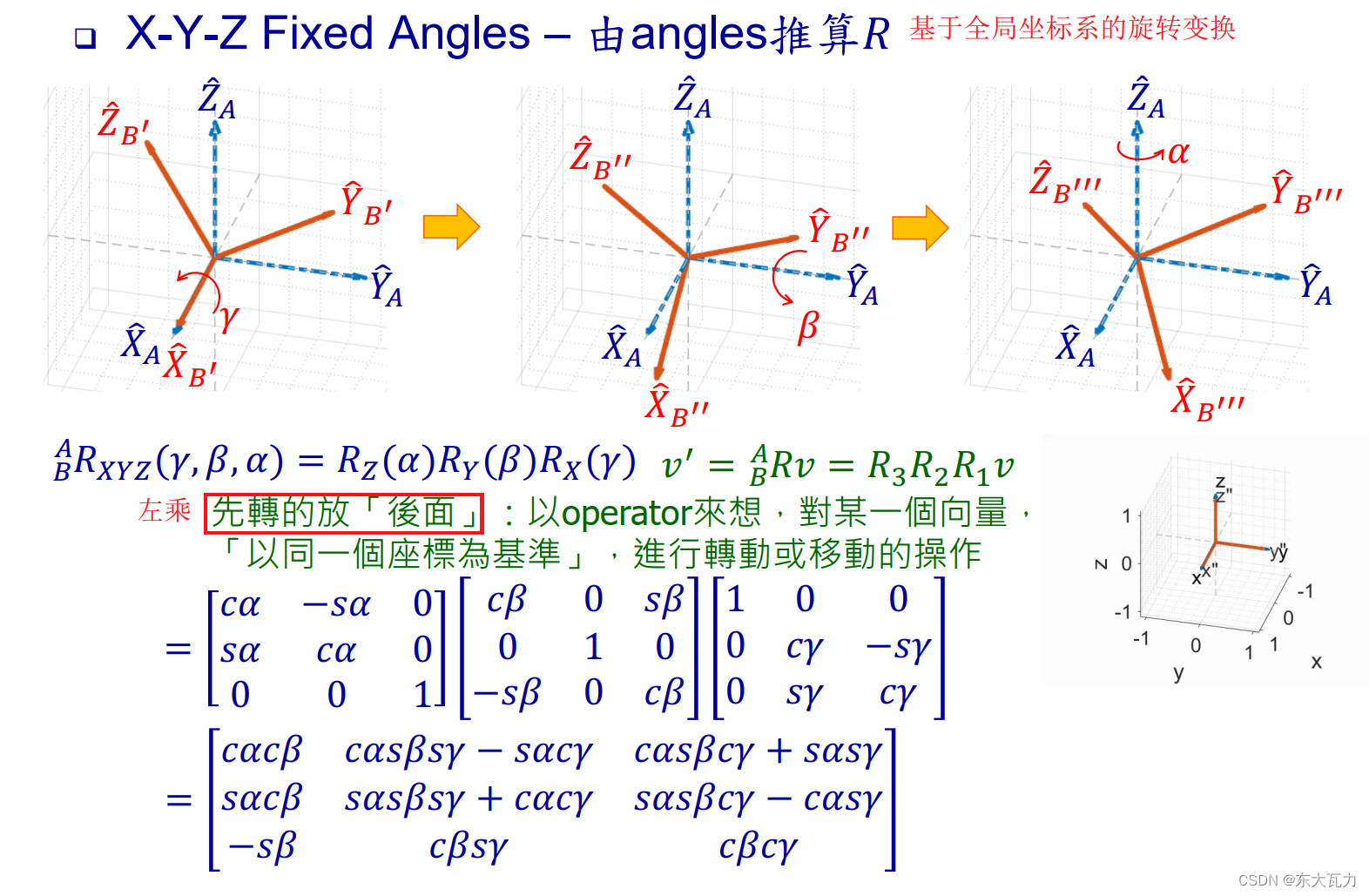
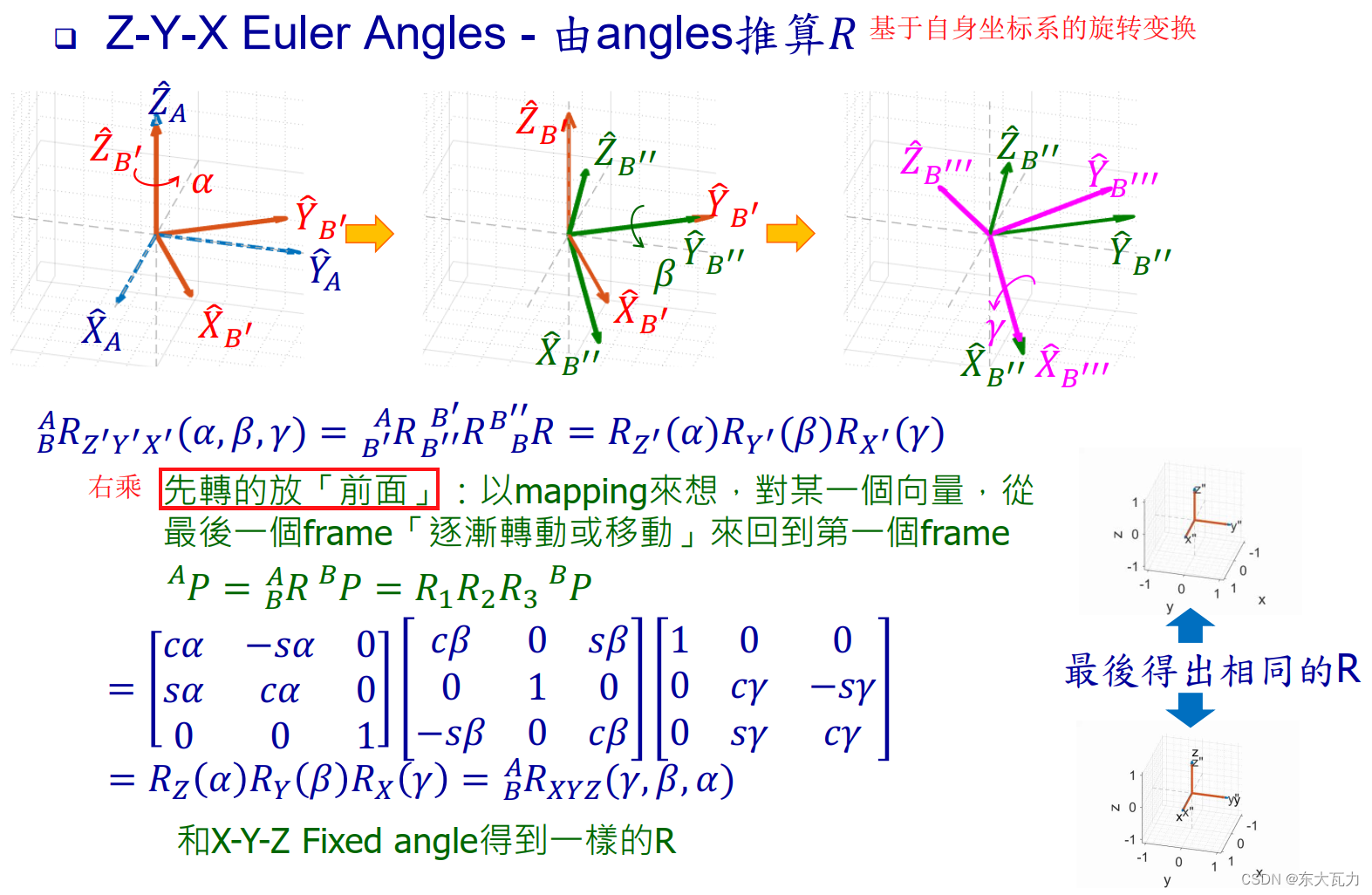
先说结论:基于全局坐标系的旋转变换左乘旋转矩阵,基于自身坐标系的旋转变换右乘旋转矩阵。 解释1: 证明,先空着,没理解清楚 解释2: 左乘:连续相对于外部坐标系(世界坐标系)的变换; 右乘:连续相对于自身坐标系的变换 解释3: 参考林沛群老师的解释: 参考 1.https://www.zhihu.com/question/407150749/answer/2354372507


























 587
587

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言






