







前言:其实都在程序包的readme.md里,这里以ROS+单目为例
Step1:下载ORB_SLAM2放进~/catkin_ws/src下面
Step2:安装各种依赖项,github官网都写了
Step3:编译ThirdParty下面的库,可以挨个进入cmake+make,也可以执行给的build.sh,具体怎么用这个文件readme.md里面给了:
cd ORB_SLAM2
chmod +x build.sh
./build.sh
- 1
- 2
- 3
Step4:(如果执行过上面的build.sh文件这一步就不用了)进入Vocabulary解压里面的文件
Step5:启动我上一篇博文里面的cv_camera把摄像头数据发布到topic
Step6:进入/home/kylefan/catkin_ws/src/ORB_SLAM2/Examples/ROS/ORB_SLAM2/src下面打开ros_mono.cc把程序里面的topic改为/cv_camera/image_raw,具体还要查看自己的rviz,然后进入/home/kylefan/catkin_ws/src/ORB_SLAM2/Examples/ROS/ORB_SLAM2/build下面cmake+make编译,然后:
cd~/catkin_ws
catkin_make ORB_LSAM2
- 1
- 2
对于这个程序没什么区别。
Step7:添加ROS_PACKAGE_PATH路径(要想永久添加参照我之前博文关于如何永久修改linux系统环境变量)
export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:/home/kylefan/catkin_ws/src/ORB_SLAM2/Examples/ROS
Step8:启动mono
rosrun ORB_SLAM2 Mono /home/kylefan/catkin_ws/src/ORB_SLAM2/Vocabulary/ORBvoc.txt /home/kylefan/catkin_ws/src/ORB_SLAM2/Examples/Monocular/TUM1.yaml
有两个参数,第二个参数是相机参数文件,根据自己的相机参数修改。
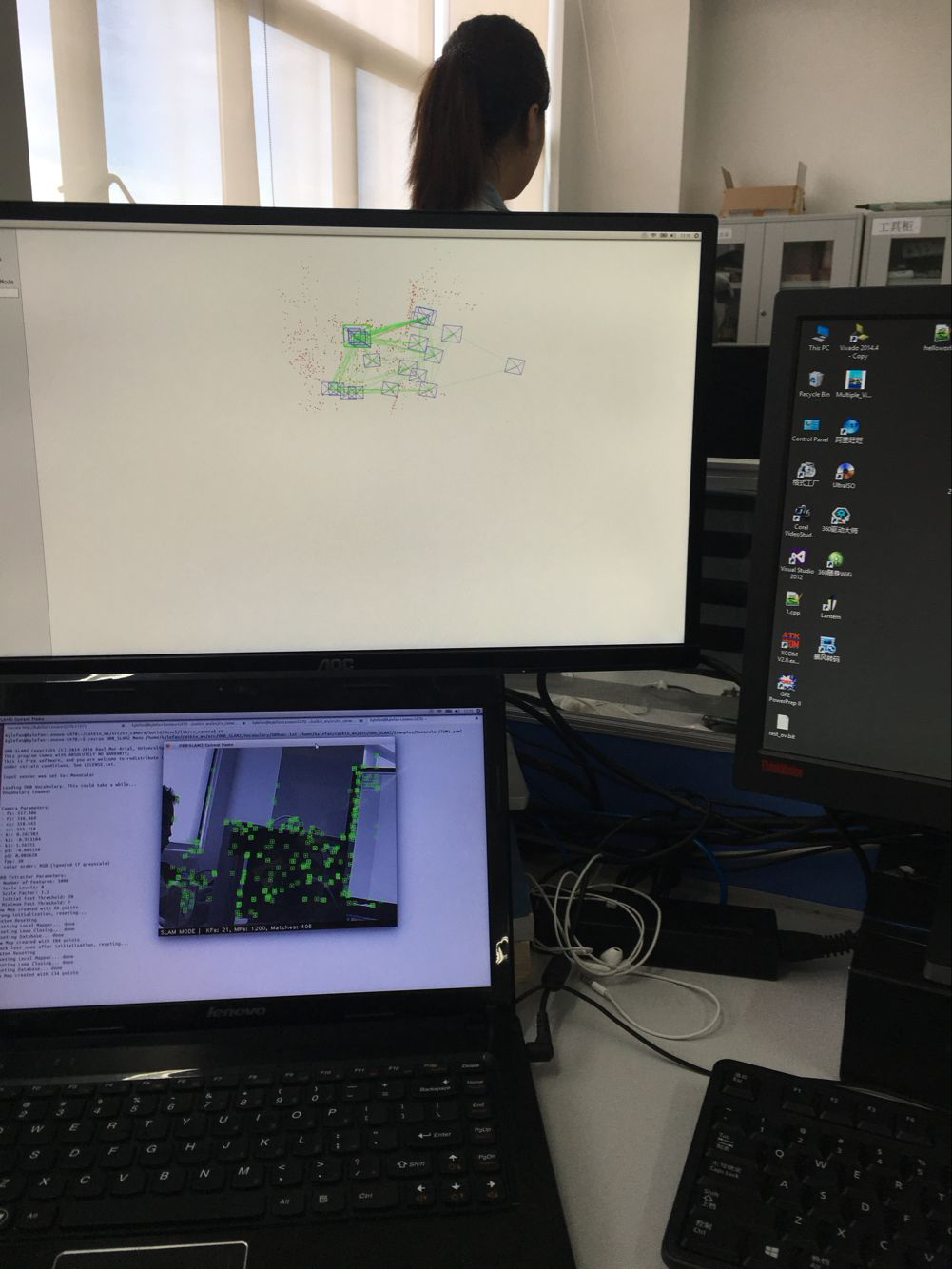
成功启动。















 9409
9409

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









