







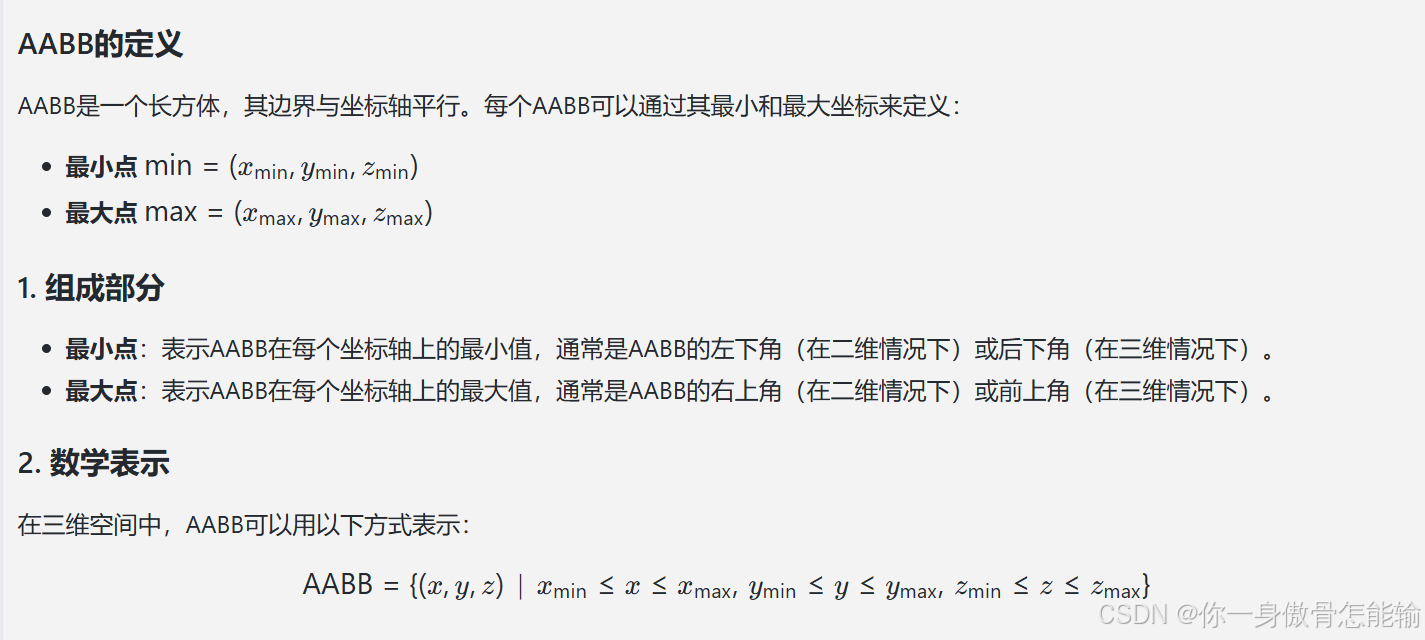
轴对齐包围盒(Axis-Aligned Bounding Box, AABB)是一种用于表示三维空间中物体的简单几何形状。AABB的主要特点是其边界与坐标轴对齐,这使得它在碰撞检测和空间分割等应用中非常高效。以下是AABB的详细定义和相关概念。
3. 特点
- 轴对齐:AABB的边界始终与坐标轴平行,这使得碰撞检测和空间查询变得简单。
- 简单性:AABB的定义和计算相对简单,适合快速碰撞检测。
- 包围性:AABB可以包围任意形状的物体,但可能会导致较大的包围体积,尤其是对于复杂形状的物体。
4. 应用
AABB广泛应用于计算机图形学和游戏开发中的以下场景:
- 碰撞检测:用于快速判断两个物体是否可能发生碰撞。
- 空间分割:在场景中使用AABB进行空间分割,以提高渲染和物理计算的效率。
- 视锥剔除:用于判断物体是否在视锥内,从而决定是否渲染该物体。
6. 总结
轴对齐包围盒(AABB)是一种简单而有效的几何表示方法,适用于长方体形状的物体。通过最小和最大坐标的定义,AABB能够高效地进行碰撞检测和空间查询。尽管在处理复杂形状时可能存在一定的局限性,但其高效性和易用性使其在许多应用场景中仍然非常受欢迎。
轴对齐包围盒(AABB)在计算机图形学和游戏开发中有着广泛的应用,主要体现在以下几个方面:
1. 碰撞检测
AABB是碰撞检测中最常用的方法之一,特别适用于长方体形状的物体。通过比较两个AABB的最小和最大坐标,可以快速判断它们是否发生碰撞。这种方法的优点在于计算简单且高效,适合实时应用。
- 快速判断:由于AABB的边界与坐标轴对齐,碰撞检测只需进行简单的比较运算,避免了复杂的几何计算。
- 适用性广:可以用于2D和3D场景中的各种物体,尤其是那些形状规则的物体。
2. 空间分割
在复杂场景中,使用AABB进行空间分割可以显著提高渲染和物理计算的效率。常见的空间分割技术包括:
- 八叉树(Octree):在三维空间中使用AABB将场景划分为多个子区域,以便于管理和查询。
- 四叉树(Quadtree):在二维空间中使用AABB进行分割,适用于平面场景的管理。
- 网格划分:将场景划分为多个AABB区域,以便于快速查找和处理物体。
通过空间分割,可以减少需要检查的物体数量,从而提高性能。
3. 视锥剔除
视锥剔除是图形渲染中的一个重要优化技术,旨在减少渲染过程中不必要的计算。AABB可以用于判断物体是否在视锥内:
- 视锥定义:视锥是由摄像机的视野定义的一个空间区域,只有在这个区域内的物体才需要被渲染。
- 剔除过程:通过检查物体的AABB是否与视锥相交,可以快速判断该物体是否在视野内。如果AABB完全在视锥外,则可以直接剔除该物体,避免不必要的渲染计算。
4. 其他应用
除了上述主要应用,AABB还可以用于:
- 物理模拟:在物理引擎中,AABB用于快速检测潜在的碰撞对,减少需要进行详细碰撞检测的物体对。
- 动画和角色控制:在角色动画和控制中,AABB可以用于判断角色与环境的交互,确保角色不会穿透物体。
- 场景管理:在大型场景中,AABB可以帮助管理和组织物体,提高场景的加载和渲染效率。
总结
AABB因其简单性和高效性,在计算机图形学和游戏开发中得到了广泛应用。无论是在碰撞检测、空间分割、视锥剔除,还是其他场景管理任务中,AABB都能有效提高性能和效率。尽管在处理复杂形状时可能存在一定的局限性,但其在许多应用中的优势使其成为一种重要的工具。
碰撞检测
碰撞检测是计算机图形学和游戏开发中的一个重要领域,AABB(轴对齐包围盒)是其中最常用的方法之一。以下是关于AABB在碰撞检测中的应用的详细说明:
AABB在碰撞检测中的应用
1. 碰撞检测的基本原理
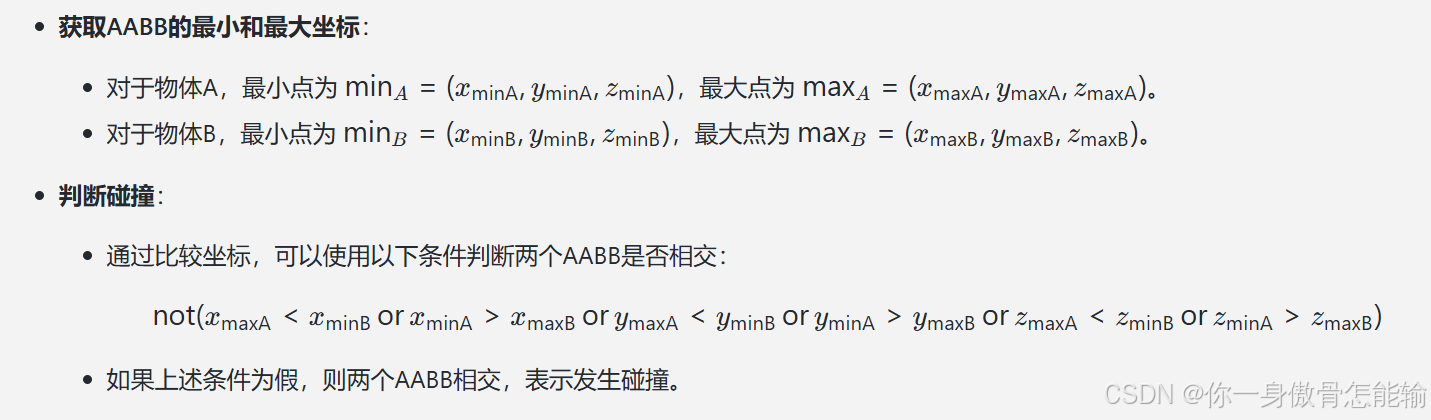
AABB通过定义物体的最小和最大坐标来形成一个长方体(在3D中)或矩形(在2D中),从而包围物体。要判断两个AABB是否发生碰撞,可以通过以下步骤进行:
2. 优点
-
计算简单:AABB的碰撞检测只需要进行简单的比较运算(如小于、大于),这使得它在实时应用中非常高效。相比于其他更复杂的碰撞检测方法(如多边形或曲面碰撞检测),AABB的计算开销要小得多。
-
适用性广:AABB可以用于2D和3D场景中的各种物体,尤其是那些形状规则的物体。无论是简单的几何形状(如立方体、长方体)还是复杂的组合物体,只要能够用AABB包围,就可以使用这种方法进行碰撞检测。
3. 实际应用
-
游戏开发:在游戏中,AABB常用于角色与环境之间的碰撞检测,例如角色是否与墙壁、地面或其他物体发生碰撞。
-
物理引擎:许多物理引擎使用AABB进行初步的碰撞检测,以快速排除不可能发生碰撞的物体对,从而减少后续更复杂的碰撞检测计算。
-
场景管理:在大型场景中,AABB可以帮助管理和组织物体,确保只有在可能发生碰撞的物体对之间进行详细的碰撞检测。
4. 限制
尽管AABB在碰撞检测中有许多优点,但也存在一些限制:
-
包围体积大:AABB可能会包围比物体本身更大的空间,导致误判碰撞。例如,对于一个非常不规则的物体,AABB可能会与其他物体相交,但实际上物体之间并没有真正的碰撞。
-
不适用于旋转物体:由于AABB始终与坐标轴对齐,当物体旋转时,AABB的形状可能会变得不再紧凑,导致碰撞检测的准确性下降。
总结
AABB是一种高效且简单的碰撞检测方法,适用于实时应用和各种形状的物体。通过快速判断两个AABB是否相交,开发者可以在游戏和图形应用中实现高效的碰撞检测。尽管存在一些限制,但在许多场景中,AABB仍然是一个非常有用的工具。
物理引擎
在物理引擎中,AABB(轴对齐包围盒)被广泛应用于初步的碰撞检测,以提高性能和效率。以下是关于AABB在物理引擎中应用的详细说明:
AABB在物理引擎中的应用
1. 初步碰撞检测
物理引擎通常需要处理大量的物体,这些物体之间可能会发生碰撞。为了避免对每一对物体进行复杂的碰撞检测,物理引擎通常会使用AABB进行初步的碰撞检测。具体步骤如下:
-
生成AABB:为每个物体计算其AABB,通常在物体的位置、大小或形状发生变化时更新AABB。
-
相交检测:使用AABB的相交检测算法,快速判断两个物体的AABB是否相交。如果两个AABB不相交,则可以立即排除这两个物体之间的碰撞。
-
细化检测:对于那些相交的AABB,物理引擎会进行更复杂的碰撞检测(如多边形、圆形或其他形状的碰撞检测),以确定是否真的发生了碰撞。
2. 优势
-
性能提升:通过使用AABB进行初步检测,物理引擎可以显著减少需要进行详细碰撞检测的物体对数量。这种方法可以大幅提高性能,尤其是在场景中物体数量较多时。
-
简单高效:AABB的相交检测只需要进行简单的坐标比较,计算开销小,适合实时应用。
-
适应性强:AABB可以适用于各种形状的物体,尤其是那些规则的几何形状。即使是复杂的组合物体,只要能够计算出其AABB,就可以使用这种方法。
3. 实际应用示例
-
游戏物理引擎:许多游戏物理引擎(如Box2D、Bullet Physics等)都使用AABB进行初步碰撞检测,以提高物理计算的效率。
-
模拟环境:在模拟环境中,AABB可以帮助快速判断物体之间的相互作用,确保物体不会穿透彼此。
-
动态物体管理:在动态场景中,物体的位置和形状可能会频繁变化,AABB的更新和检测可以帮助物理引擎实时管理物体之间的碰撞。
4. 限制与挑战
尽管AABB在物理引擎中有许多优点,但也存在一些限制:
-
包围体积问题:AABB可能会包围比物体本身更大的空间,导致误判碰撞。这在处理不规则形状的物体时尤为明显。
-
旋转物体的处理:AABB始终与坐标轴对齐,因此在处理旋转物体时,AABB的形状可能会变得不再紧凑,影响碰撞检测的准确性。
-
多层次碰撞检测:在复杂场景中,可能需要结合其他碰撞检测方法(如OBB、球形碰撞检测等)来提高准确性和效率。
总结
AABB在物理引擎中的应用是实现高效碰撞检测的关键。通过初步的AABB相交检测,物理引擎能够快速排除不可能发生碰撞的物体对,从而将计算资源集中在真正可能发生碰撞的物体上。这种方法不仅提高了性能,还使得物理引擎能够在实时应用中处理大量物体的相互作用。
场景管理
在大型场景中,AABB(轴对齐包围盒)不仅用于碰撞检测,还在场景管理中发挥着重要作用。以下是关于AABB在场景管理中的应用及其优势的详细说明:
AABB在场景管理中的应用
1. 空间划分
在大型场景中,物体数量可能非常庞大,直接对每一对物体进行碰撞检测会导致性能瓶颈。AABB可以用于空间划分,帮助管理和组织场景中的物体。常见的空间划分方法包括:
-
四叉树(Quadtree):在2D场景中,四叉树将空间递归地划分为四个象限,每个象限可以包含多个物体。每个物体的AABB可以用来确定它属于哪个象限,从而快速定位可能发生碰撞的物体。
-
八叉树(Octree):在3D场景中,八叉树将空间划分为八个子立方体,适用于管理三维物体。AABB同样用于确定物体在树中的位置。
-
网格划分:将场景划分为固定大小的网格,每个网格单元中存储与之相交的物体的AABB。这种方法可以快速查找可能发生碰撞的物体。
2. 碰撞检测优化
通过使用AABB进行空间划分,场景管理可以显著减少需要进行详细碰撞检测的物体对数量。具体步骤如下:
-
快速排除:在进行碰撞检测时,首先检查物体的AABB是否相交。如果不相交,则可以立即排除这两个物体之间的碰撞检测。
-
细化检测:对于那些相交的AABB,进一步进行更复杂的碰撞检测(如多边形、球体等),以确定是否真的发生了碰撞。
3. 动态物体管理
在动态场景中,物体的位置和状态可能会频繁变化。AABB可以帮助管理这些动态物体:
-
实时更新:当物体移动或变形时,更新其AABB相对简单且高效。这使得物理引擎能够实时管理物体之间的相互作用。
-
动态插入与删除:在空间划分结构中,AABB可以帮助快速插入和删除物体。例如,当一个物体离开某个区域时,可以迅速将其从相应的四叉树或八叉树中移除。
4. 可视化与渲染优化
AABB还可以用于场景的可视化和渲染优化:
-
视锥剔除:在渲染过程中,可以使用AABB进行视锥剔除。通过检查物体的AABB是否在摄像机的视锥内,可以快速决定是否渲染该物体,从而提高渲染性能。
-
LOD(细节层次)管理:AABB可以帮助确定物体的细节层次,根据物体与摄像机的距离选择合适的模型细节,从而优化渲染性能。
总结
AABB在大型场景管理中发挥着重要作用,通过空间划分和碰撞检测优化,能够有效管理和组织场景中的物体。它不仅提高了碰撞检测的效率,还在动态物体管理和渲染优化中提供了支持。通过合理使用AABB,开发者可以在复杂场景中实现高效的物理模拟和图形渲染。
四叉树(Quadtree)
四叉树(Quadtree)是一种用于管理和组织二维空间中物体的有效数据结构,特别适用于需要进行碰撞检测、视图剔除和空间查询的场景。以下是关于四叉树的详细说明,包括其结构、工作原理、优缺点以及在实际应用中的示例。
四叉树的结构
四叉树将二维空间递归地划分为四个象限(子区域),每个象限可以包含多个物体。其基本结构如下:
-
节点:每个节点代表一个区域,包含以下信息:
- 边界:该节点所代表的区域的边界(通常是一个矩形)。
- 物体列表:该区域内的物体(通常是AABB)。
- 子节点:四个子节点,分别代表该区域的四个象限。
-
递归划分:当一个节点中的物体数量超过预设的阈值时,该节点会被划分为四个子节点。每个子节点对应于当前节点的四个象限。
工作原理
四叉树的工作原理可以分为以下几个步骤:
-
插入物体:
- 当一个物体(通常是其AABB)需要插入四叉树时,首先检查该物体的AABB是否与当前节点的边界相交。
- 如果相交,则将物体添加到当前节点的物体列表中。
- 如果物体数量超过阈值,则将当前节点划分为四个子节点,并将现有物体重新分配到适当的子节点中。
-
查询物体:
- 在进行碰撞检测或其他空间查询时,首先从根节点开始,检查查询区域(如另一个物体的AABB)与当前节点的边界是否相交。
- 如果相交,则递归地检查子节点,直到找到所有可能与查询区域相交的物体。
-
删除物体:
- 删除物体时,首先找到物体所在的节点,然后从物体列表中移除该物体。如果节点中的物体数量低于某个阈值,可以选择合并子节点。
优点
-
高效性:四叉树能够有效地减少需要检查的物体数量,特别是在物体分布不均匀的情况下。通过空间划分,只有在可能发生碰撞的区域内进行详细检测。
-
动态管理:四叉树可以动态地插入和删除物体,适应场景中物体的变化。
-
适应性强:适用于各种类型的2D场景,尤其是那些具有大量静态和动态物体的场景。
缺点
-
内存开销:四叉树的节点结构可能会导致一定的内存开销,尤其是在物体数量较少或分布较均匀的情况下。
-
不均匀分布问题:如果物体在空间中分布非常不均匀,可能会导致某些节点过于拥挤,而其他节点则几乎为空,从而影响性能。
-
复杂性:实现四叉树的插入、删除和查询操作相对复杂,尤其是在处理动态物体时。
实际应用示例
-
游戏开发:在2D游戏中,四叉树常用于管理游戏对象(如角色、敌人、子弹等),以提高碰撞检测和渲染性能。
-
地理信息系统(GIS):四叉树可以用于存储和查询地理数据,如地图上的建筑物、道路等。
-
图形渲染:在图形渲染中,四叉树可以帮助进行视锥剔除,快速确定哪些物体需要被渲染。
总结
四叉树是一种强大的空间管理工具,能够有效地组织和管理二维场景中的物体。通过递归划分空间,四叉树能够快速定位可能发生碰撞的物体,从而提高碰撞检测的效率。尽管存在一些缺点,但在许多应用场景中,四叉树仍然是一个非常有用的选择。
细化检测
细化检测是碰撞检测过程中的一个重要步骤,尤其是在使用AABB(轴对齐包围盒)进行初步筛选后。通过细化检测,物理引擎能够更准确地判断物体之间是否发生了实际的碰撞。以下是细化检测的详细说明,包括常见的碰撞检测方法、实现步骤以及在实际应用中的示例。
细化检测的目的
细化检测的主要目的是在初步的AABB相交检测后,进一步确认物体之间是否真的发生了碰撞。AABB检测虽然快速,但由于其简单性,可能会产生误报(即检测到相交但实际上并未发生碰撞)。细化检测通过更复杂的算法来提高碰撞检测的准确性。
常见的细化检测方法

-
多边形碰撞检测:
- 方法:使用分离轴定理(Separating Axis Theorem, SAT)来判断两个凸多边形是否相交。对于每一条边,计算其法向量,并检查在该法向量上的投影是否重叠。
- 步骤:
- 对于每个多边形,计算其所有边的法向量。
- 对于每个法向量,计算两个多边形在该法向量上的投影。
- 检查投影是否重叠。如果在任何一个法向量上没有重叠,则两个多边形不相交。
-
线段碰撞检测:
- 方法:使用参数方程或向量运算来判断两条线段是否相交。可以通过计算线段的交点并检查交点是否在两条线段的范围内来实现。
- 步骤:
- 计算两条线段的参数方程。
- 解方程以找到交点。
- 检查交点是否在两条线段的范围内。

实现步骤
-
初步检测:使用AABB进行初步的碰撞检测,筛选出可能相交的物体对。
-
选择细化检测方法:根据物体的形状选择合适的细化检测方法(如圆形、多边形、线段等)。
-
执行细化检测:对筛选出的物体对执行细化检测,判断是否发生实际碰撞。
-
处理碰撞:如果检测到碰撞,执行相应的物理响应(如反弹、穿透处理等)。
实际应用示例
-
游戏开发:在2D或3D游戏中,使用AABB进行初步碰撞检测,然后对相交的物体进行细化检测,以确保游戏中的物理交互准确无误。
-
物理模拟:在物理引擎中,细化检测用于确保物体之间的相互作用(如摩擦、弹性碰撞等)能够正确计算。
-
虚拟现实(VR):在VR应用中,细化检测可以确保用户与虚拟环境中的物体之间的交互是自然和真实的。
总结
细化检测是碰撞检测中的关键步骤,通过使用更复杂的算法来确认物体之间的实际碰撞情况。通过结合初步的AABB检测和细化检测,物理引擎能够在性能和准确性之间取得良好的平衡,从而提供更真实的物理模拟和交互体验。



















 5046
5046

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











