







在计算机图形学中,球坐标系是一种用于表示三维空间中点的位置的坐标系统。它通过半径和两个角度来描述点的位置,通常表示为 (r, θ, φ),其中:
-
r:表示从原点到该点的距离(即半径)。它是一个非负数,表示点到原点的直线距离。
-
θ(theta):表示从 Z 轴到该点的夹角。这个角度通常在 0 到 π(180度)之间变化。θ = 0 表示点在 Z 轴的正方向,θ = π 表示点在 Z 轴的负方向。
-
φ(phi):表示在 XY 平面内,从 X 轴到该点的投影的夹角。这个角度通常在 0 到 2π(360度)之间变化。φ = 0 表示点在 X 轴的正方向,φ = π/2 表示点在 Y 轴的正方向,φ = π 表示点在 X 轴的负方向,φ = 3π/2 表示点在 Y 轴的负方向。
从球坐标系到笛卡尔坐标系的转换
在计算机图形学中,通常需要将球坐标系转换为笛卡尔坐标系(Cartesian coordinates),以便进行图形绘制和计算。转换公式如下:
- x=r⋅sin(θ)⋅cos(φ)
- y=r⋅sin(θ)⋅sin(φ)
- z=r⋅cos(θ)
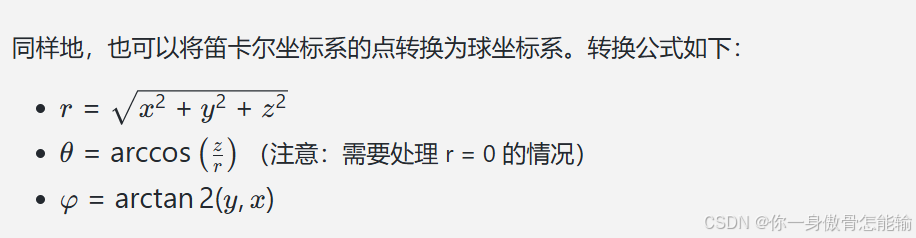
从笛卡尔坐标系到球坐标系的转换
应用
球坐标系在许多应用中非常有用,尤其是在涉及到球形物体、天体物理学、计算机图形学中的光照模型、以及在3D建模和动画中处理旋转和运动时。它提供了一种直观的方式来描述三维空间中的点,特别是在处理与球形对称性相关的问题时。
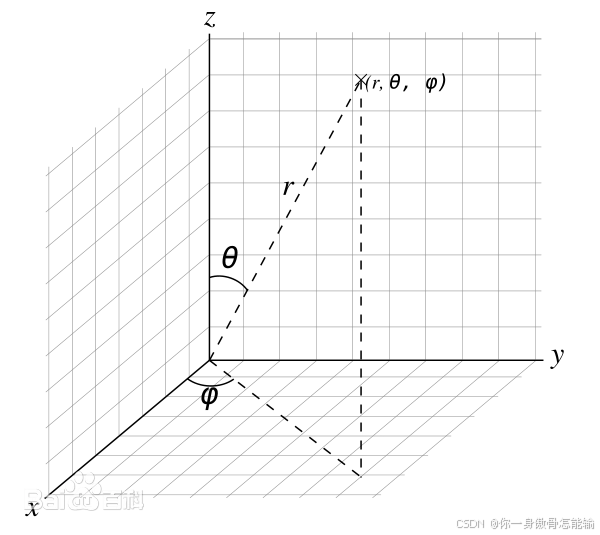
如下圆球坐标系概述图
从球坐标系到笛卡尔坐标系的转换的原理
从球坐标系到笛卡尔坐标系的转换基于三角函数的基本原理。球坐标系使用半径r 和两个角度ϕ(与 Z 轴的夹角)和 ϕ(在 XY 平面内与 X 轴的夹角)来表示三维空间中的点。笛卡尔坐标系则使用 (x, y, z) 来表示同样的点。
球坐标系的定义
在球坐标系中,一个点的坐标表示为 (r,θ,ϕ),其中:
- r 是点到原点的距离(半径)。
- θ 是从 Z 轴向下测量的角度(极角),范围通常是 [0,π)。
- ϕ 是在 XY 平面内,从 X 轴开始顺时针测量的角度(方位角),范围通常是[0,2π)。
转换公式
从球坐标系 (r,θ,ϕ)到笛卡尔坐标系 (x, y, z) 的转换公式如下:
x=r⋅sin(θ)⋅cos(ϕ)
y=r⋅sin(θ)⋅sin(ϕ)
z=r⋅cos(θ)
转换原理
-
Z 轴的计算:
- z=r⋅cos(θ)
- 这个公式表示从原点到点的投影在 Z 轴上的高度。随着 ( \theta ) 的增大,点在 Z 轴上的高度会减小。
-
XY 平面的计算:
- 在 XY 平面上,点的投影形成一个圆,其半径为 ( r \cdot \sin(\theta) )。
- 这个半径是通过 ( r ) 乘以sin(θ)得到的,因为sin(θ) 表示与 Z 轴的夹角越小,点在 XY 平面上的投影越大。
- 然后,使用 ( \phi ) 来确定在 XY 平面上的具体位置:
- x=r⋅sin(θ)⋅cos(ϕ)
- y=r⋅sin(θ)⋅sin(ϕ)
- 这里,cos(ϕ) 和 sin(θ) 分别表示在 XY 平面上与 X 轴和 Y 轴的投影。
总结
通过上述公式,可以将球坐标系中的点转换为笛卡尔坐标系中的点。这种转换利用了三角函数的性质,能够将三维空间中的点从一种表示方式转换为另一种表示方式,便于在计算机图形学、物理模拟和其他应用中进行处理。
从球坐标系到笛卡尔坐标系的转换的目的
从球坐标系到笛卡尔坐标系的转换在计算机图形学、物理模拟、游戏开发和其他三维计算领域中具有重要的目的和应用。以下是一些主要目的:
1. 便于计算和渲染
- 图形渲染:大多数图形渲染引擎和图形API(如OpenGL、DirectX)使用笛卡尔坐标系来表示物体的位置、方向和光源。因此,将球坐标系转换为笛卡尔坐标系是必要的,以便在这些系统中进行渲染。
- 几何计算:在进行碰撞检测、光照计算和其他几何操作时,笛卡尔坐标系通常更为直观和易于处理。
2. 物理模拟
- 运动模拟:在物理引擎中,物体的运动通常在笛卡尔坐标系中进行描述。将球坐标系转换为笛卡尔坐标系可以帮助模拟物体在三维空间中的运动轨迹。
- 力和加速度:在计算力、加速度和其他物理量时,笛卡尔坐标系提供了更直接的方式来描述这些量的方向和大小。
3. 用户交互
- 相机控制:在游戏和虚拟现实中,用户的视角通常通过相机控制。使用球坐标系来描述相机的位置和方向,然后转换为笛卡尔坐标系,以便在场景中正确定位相机。
- 角色控制:角色的旋转和移动可以使用球坐标系进行描述,但在实际应用中,通常需要将这些值转换为笛卡尔坐标系,以便进行位置更新和动画。
4. 简化数学计算
- 三角函数的使用:在某些情况下,使用球坐标系可以简化某些数学计算(如旋转和角度计算),但最终需要将结果转换为笛卡尔坐标系,以便进行实际的图形绘制和物理计算。
- 避免复杂的三角关系:在处理某些几何问题时,使用笛卡尔坐标系可以避免复杂的三角关系,使得计算更加直接和简单。
5. 数据存储和传输
- 数据格式:在存储和传输三维数据时,笛卡尔坐标系通常是更常用的格式。将球坐标系转换为笛卡尔坐标系可以确保数据的兼容性和可用性。
总结
从球坐标系到笛卡尔坐标系的转换是一个重要的步骤,旨在使得三维空间中的计算、渲染和交互更加高效和直观。通过这种转换,开发者可以利用笛卡尔坐标系的优势来实现更复杂的图形和物理效果。
在计算机图形学和游戏开发中,球坐标系(spherical coordinates)被广泛应用于多种场景,尤其是在处理三维空间中的物体位置、运动和视角时。以下是球坐标系在游戏中的一些具体应用:
1. 相机控制
在许多3D游戏中,玩家的视角通常是通过相机来控制的。使用球坐标系可以方便地实现相机的旋转和移动:
- 相机旋转:通过调整角度 θ 和 φ,可以实现相机围绕目标物体的旋转。例如,θ 控制相机的上下视角,φ 控制相机的左右视角。
- 相机距离:通过调整半径 r,可以实现相机与目标物体之间的距离变化,从而实现拉近或拉远的效果。
2. 物体运动
在一些游戏中,物体的运动可以用球坐标系来描述,特别是在涉及到球形轨道或旋转运动时:
- 轨道运动:物体可以沿着一个固定的半径 r 进行旋转,θ 和 φ 可以用来控制物体在三维空间中的位置。例如,行星围绕恒星的运动可以用球坐标系来模拟。
- 粒子系统:在粒子效果中,粒子可以从一个中心点以球形方式发射,使用球坐标系可以方便地生成粒子的初始位置和方向。
3. 光照和阴影计算
在光照模型中,球坐标系可以用于计算光源与物体之间的关系:
- 光源位置:在某些情况下,光源的位置可以用球坐标系来表示,特别是在需要模拟点光源或聚光灯时。通过调整 r、θ 和 φ,可以轻松地改变光源的位置和方向。
- 环境光照:在计算环境光照时,使用球坐标系可以更方便地处理光线的传播和反射。
4. 碰撞检测
在某些情况下,使用球坐标系可以简化碰撞检测的计算,特别是在处理球形物体或球形区域时:
- 球形碰撞:对于球形物体,使用球坐标系可以直接计算物体之间的距离和角度,从而判断是否发生碰撞。
- 区域检测:在游戏中,可以使用球坐标系来定义某个区域(例如,攻击范围、视野范围等),通过 r 和角度来判断物体是否在该区域内。
5. 动画和角色控制
在角色动画中,球坐标系可以用于控制角色的旋转和移动:
- 角色旋转:通过调整 θ 和 φ,可以实现角色的头部、身体或四肢的旋转,特别是在需要实现自然的运动时。
- 路径动画:在某些情况下,角色可以沿着球形路径移动,使用球坐标系可以方便地计算角色在路径上的位置。
总结
球坐标系在游戏开发中提供了一种直观且有效的方式来处理三维空间中的位置、运动和视角。通过使用 (r, θ, φ) 表示点的位置,开发者可以更容易地实现复杂的运动和交互效果,提升游戏的沉浸感和可玩性。
球坐标系图形案例
在3D游戏和虚拟现实中,相机控制是一个至关重要的部分。使用球坐标系来控制相机的旋转和移动可以使得相机的操作更加直观和灵活。以下是如何使用球坐标系来实现相机控制的详细说明。
1. 相机旋转
在球坐标系中,相机的旋转可以通过调整两个角度 θ 和 ϕ来实现:
- θ(极角):控制相机的上下视角。增大θ会使相机向上看,减小θ 会使相机向下看。
- ϕ(方位角):控制相机的左右视角。增大ϕ会使相机向右转,减小 ϕ会使相机向左转。
2. 相机距离
- ( r )(半径):控制相机与目标物体之间的距离。增大 ( r ) 会使相机远离目标物体,减小 ( r ) 会使相机靠近目标物体。
3. 转换为笛卡尔坐标
在实际应用中,使用球坐标系的角度和半径来计算相机在笛卡尔坐标系中的位置。相机的位置可以通过以下公式计算:
cameraX=r⋅sin(θ)⋅cos(ϕ)
cameraY=r⋅sin(θ)⋅sin(ϕ)
cameraZ=r⋅cos(θ)
4. 实现相机控制的伪代码示例
以下是一个简单的伪代码示例,展示如何实现相机控制:
// 初始化相机参数
float r = 10.0; // 相机与目标物体的距离
float theta = π / 4; // 初始上下视角
float phi = 0; // 初始左右视角
function updateCamera():
// 根据输入调整 theta 和 phi
if user presses up:
theta += deltaTime * rotationSpeed // 向上旋转
if user presses down:
theta -= deltaTime * rotationSpeed // 向下旋转
if user presses left:
phi -= deltaTime * rotationSpeed // 向左旋转
if user presses right:
phi += deltaTime * rotationSpeed // 向右旋转
// 根据输入调整相机距离
if user scrolls up:
r -= deltaTime * zoomSpeed // 拉近
if user scrolls down:
r += deltaTime * zoomSpeed // 拉远
// 计算相机位置
cameraX = r * sin(theta) * cos(phi)
cameraY = r * sin(theta) * sin(phi)
cameraZ = r * cos(theta)
// 设置相机位置
setCameraPosition(cameraX, cameraY, cameraZ)
// 设置相机朝向目标物体
setCameraLookAt(targetX, targetY, targetZ)
5. 注意事项
- 角度限制:在实际应用中,通常需要限制θ 的范围(例如,0 到 π),以避免相机翻转。
- 平滑过渡:可以使用插值方法(如线性插值或球面线性插值)来平滑相机的移动和旋转,使得用户体验更加流畅。
- 相机碰撞检测:在某些情况下,需要实现相机的碰撞检测,以避免相机穿过物体。
总结
使用球坐标系来控制相机的旋转和移动,可以使得相机操作更加直观和灵活。通过调整角度和距离,玩家可以自由地探索三维场景,增强游戏的沉浸感和互动性。
当然!我们可以进一步探讨相机控制的实现细节、优化方法以及在实际应用中的一些常见问题和解决方案。
6. 相机控制的优化
在实际开发中,优化相机控制的体验是非常重要的。以下是一些优化建议:
6.1. 平滑旋转和缩放
-
插值:使用插值算法(如线性插值或球面线性插值)来平滑相机的旋转和缩放。例如,可以在每帧更新中逐渐接近目标角度和距离,而不是直接跳转到目标值。
// 平滑插值 theta = lerp(currentTheta, targetTheta, smoothFactor) r = lerp(currentR, targetR, smoothFactor)
6.2. 限制相机角度
-
限制上下视角:为了避免相机翻转,可以限制 ( \theta ) 的范围。例如,可以将 ( \theta ) 限制在 ( [0.1, \pi - 0.1] ) 之间。
if theta < 0.1: theta = 0.1 if theta > π - 0.1: theta = π - 0.1
6.3. 处理相机碰撞
-
碰撞检测:在某些情况下,相机可能会穿过场景中的物体。可以实现简单的碰撞检测,确保相机不会进入物体内部。可以使用射线检测或包围盒检测来实现。
if detectCollision(cameraPosition): adjustCameraPosition() // 调整相机位置以避免碰撞
7. 实际应用中的常见问题
7.1. 相机抖动
- 问题:在快速移动或旋转时,相机可能会出现抖动。
- 解决方案:确保相机的更新逻辑与帧率同步,使用固定时间步长进行更新,或者使用平滑插值来减少抖动。
7.2. 视角不自然
- 问题:相机的旋转和缩放可能会导致视角不自然,影响玩家的沉浸感。
- 解决方案:可以引入“视角平滑”技术,例如在相机旋转时稍微延迟目标物体的旋转,或者在缩放时使用非线性缩放函数,使得缩放效果更加自然。
7.3. 目标物体的选择
- 问题:在复杂场景中,玩家可能会希望相机聚焦于不同的目标物体。
- 解决方案:可以实现目标物体的选择机制,例如通过鼠标点击或键盘输入来切换相机的目标物体。
8. 进阶功能
8.1. 第一人称与第三人称视角切换
- 第一人称视角:相机直接放置在角色的位置,通常不需要调整 ( r )。
- 第三人称视角:相机在角色后方,使用球坐标系来控制相机与角色之间的距离和角度。
8.2. 动态相机
- 动态跟随:相机可以根据角色的移动动态调整位置。例如,在角色快速移动时,相机可以稍微滞后,以增加真实感。
9. 代码示例
以下是一个更完整的伪代码示例,展示了如何实现相机控制的各个方面:
// 初始化相机参数
float r = 10.0; // 相机与目标物体的距离
float theta = π / 4; // 初始上下视角
float phi = 0; // 初始左右视角
float smoothFactor = 0.1; // 平滑因子
function updateCamera(targetPosition):
// 根据输入调整 theta 和 phi
if user presses up:
theta += deltaTime * rotationSpeed
if user presses down:
theta -= deltaTime * rotationSpeed
if user presses left:
phi -= deltaTime * rotationSpeed
if user presses right:
phi += deltaTime * rotationSpeed
// 限制 theta 的范围
theta = clamp(theta, 0.1, π - 0.1)
// 根据输入调整相机距离
if user scrolls up:
r -= deltaTime * zoomSpeed
if user scrolls down:
r += deltaTime * zoomSpeed
// 计算相机位置
cameraX = r * sin(theta) * cos(phi) + targetPosition.x
cameraY = r * sin(theta) * sin(phi) + targetPosition.y
cameraZ = r * cos(theta) + targetPosition.z
// 设置相机位置
setCameraPosition(cameraX, cameraY, cameraZ)
// 设置相机朝向目标物体
setCameraLookAt(targetPosition.x, targetPosition.y, targetPosition.z)
// 碰撞检测
if detectCollision(cameraPosition):
adjustCameraPosition() // 调整相机位置以避免碰撞
总结
通过使用球坐标系来控制相机的旋转和移动,可以实现灵活且直观的相机控制。结合平滑插值、碰撞检测和动态跟随等技术,可以进一步提升用户体验。相机控制是3D游戏开发中的一个重要方面,合理的设计和实现可以显著增强游戏的沉浸感和可玩性。
当然!我们可以进一步探讨相机控制的高级特性、用户体验优化以及在不同类型游戏中的应用。
10. 高级相机控制特性
10.1. 自适应相机
- 自适应视角:根据场景的复杂性和玩家的行为动态调整相机的视角。例如,在狭窄的空间中,自动拉近相机以避免碰撞;在开阔的空间中,自动拉远相机以提供更好的视野。
10.2. 目标跟随
-
平滑跟随:相机可以平滑地跟随目标物体的移动,而不是直接跳转到目标位置。可以使用插值算法来实现这一点。
cameraPosition = lerp(cameraPosition, targetPosition, followSmoothFactor)
10.3. 视角切换
- 多种视角:允许玩家在第一人称、第三人称和鸟瞰视角之间切换。每种视角可以有不同的相机参数和控制方式。
11. 用户体验优化
11.1. 控制灵敏度
-
灵敏度设置:允许玩家自定义相机控制的灵敏度,以适应不同的游戏风格和个人偏好。可以通过调整旋转速度和缩放速度来实现。
rotationSpeed = baseRotationSpeed * userDefinedSensitivity zoomSpeed = baseZoomSpeed * userDefinedSensitivity
11.2. 视觉反馈
- 视觉效果:在相机移动或旋转时,添加一些视觉效果(如模糊、渐变等),以增强玩家的沉浸感。例如,在快速移动时,可以添加运动模糊效果。
11.3. 交互提示
- 提示信息:在游戏中提供相机控制的提示信息,帮助玩家理解如何操作相机。例如,在新手教程中,可以引导玩家使用鼠标或手柄进行相机控制。
12. 不同类型游戏中的应用
12.1. 动作冒险游戏
在动作冒险游戏中,通常需要快速的相机切换和动态跟随。相机可以在战斗时快速切换到第一人称视角,而在探索时使用第三人称视角。
12.2. 角色扮演游戏(RPG)
在角色扮演游戏中,玩家通常需要更细致的相机控制。可以实现自由旋转和缩放,以便玩家能够更好地观察角色和环境。
12.3. 竞速游戏
在竞速游戏中,相机通常需要快速跟随赛车,并提供宽广的视野。可以使用动态相机来调整视角,以便在高速移动时保持稳定。
12.4. 恐怖游戏
在恐怖游戏中,相机控制可以用来增强紧张感。可以使用固定视角、慢速移动和突然的视角切换来制造惊吓效果。
13. 代码示例:动态相机
以下是一个动态相机的伪代码示例,展示如何实现自适应相机和目标跟随:
// 初始化相机参数
float r = 10.0; // 相机与目标物体的距离
float theta = π / 4; // 初始上下视角
float phi = 0; // 初始左右视角
float followSmoothFactor = 0.1; // 跟随平滑因子
function updateCamera(targetPosition):
// 根据输入调整 theta 和 phi
if user presses up:
theta += deltaTime * rotationSpeed
if user presses down:
theta -= deltaTime * rotationSpeed
if user presses left:
phi -= deltaTime * rotationSpeed
if user presses right:
phi += deltaTime * rotationSpeed
// 限制 theta 的范围
theta = clamp(theta, 0.1, π - 0.1)
// 根据输入调整相机距离
if user scrolls up:
r -= deltaTime * zoomSpeed
if user scrolls down:
r += deltaTime * zoomSpeed
// 计算相机位置
cameraX = r * sin(theta) * cos(phi) + targetPosition.x
cameraY = r * sin(theta) * sin(phi) + targetPosition.y
cameraZ = r * cos(theta) + targetPosition.z
// 平滑跟随目标
cameraPosition = lerp(cameraPosition, Vector3(cameraX, cameraY, cameraZ), followSmoothFactor)
// 设置相机位置
setCameraPosition(cameraPosition.x, cameraPosition.y, cameraPosition.z)
// 设置相机朝向目标物体
setCameraLookAt(targetPosition.x, targetPosition.y, targetPosition.z)
// 碰撞检测
if detectCollision(cameraPosition):
adjustCameraPosition() // 调整相机位置以避免碰撞
14. 总结
相机控制是3D游戏开发中的一个重要组成部分,合理的相机控制可以显著提升玩家的游戏体验。通过使用球坐标系、动态跟随、自适应视角和用户体验优化等技术,可以实现灵活且直观的相机控制。不同类型的游戏可以根据其特性和需求,采用不同的相机控制策略,以增强游戏的沉浸感和互动性。
在游戏开发中,使用球坐标系来描述物体的运动是一种非常有效的方法,尤其是在涉及到旋转和球形轨道的场景中。以下是关于如何在球坐标系中实现物体运动的详细讨论,包括轨道运动和粒子系统的实现。
1. 球坐标系基础
在球坐标系中,一个点的位置由三个参数定义:
- r:点到原点的距离(半径)。
- θ:与 z 轴的夹角(极角),通常在 ( [0, π] ) 范围内。
- ϕ:与 x 轴的夹角(方位角),通常在 ( [0, 2π] ) 范围内。
通过这些参数,可以将球坐标转换为笛卡尔坐标系中的位置:
x=r⋅sin(θ)⋅cos(ϕ)
y=r⋅sin(θ)⋅sin(ϕ)
z=r⋅cos(θ)
2. 轨道运动
在轨道运动中,物体沿着一个固定的半径 ( r ) 进行旋转。可以通过不断更新 ( \phi ) 的值来实现物体的旋转。
2.1. 代码示例
以下是一个简单的伪代码示例,展示如何实现物体沿着球形轨道的运动:
// 初始化参数
float r = 10.0; // 半径
float theta = π / 4; // 极角
float phi = 0; // 方位角
float angularSpeed = 0.1; // 角速度
function updateObjectPosition():
// 更新方位角
phi += angularSpeed * deltaTime // deltaTime 是帧时间
// 计算新的位置
x = r * sin(theta) * cos(phi)
y = r * sin(theta) * sin(phi)
z = r * cos(theta)
// 设置物体的位置
setObjectPosition(x, y, z)
在这个示例中,物体将围绕 z 轴旋转,形成一个圆形轨道。通过调整 ( angularSpeed ) 的值,可以控制物体的旋转速度。
3. 粒子系统
在粒子系统中,使用球坐标系可以方便地生成粒子的初始位置和方向。粒子可以从一个中心点以球形方式发射,形成各种效果,如爆炸、烟雾等。
3.1. 粒子发射
可以随机生成θ 和 ϕ 的值,以确定粒子的发射方向。以下是一个简单的粒子发射示例:
function emitParticle(centerPosition):
// 随机生成极角和方位角
float theta = random(0, π) // 随机在 [0, π] 范围内
float phi = random(0, 2 * π) // 随机在 [0, 2π] 范围内
// 设定粒子发射的半径
float r = random(minRadius, maxRadius)
// 计算粒子的位置
x = centerPosition.x + r * sin(theta) * cos(phi)
y = centerPosition.y + r * sin(theta) * sin(phi)
z = centerPosition.z + r * cos(theta)
// 创建粒子并设置其初始位置
Particle particle = createParticle()
setParticlePosition(particle, x, y, z)
// 设置粒子的初始速度(可以根据需要进行调整)
setParticleVelocity(particle, randomVelocity())
在这个示例中,粒子从中心位置以随机方向发射,形成一个球形的发射效果。通过调整 ( minRadius ) 和 ( maxRadius ),可以控制粒子发射的范围。
4. 总结
使用球坐标系来描述物体的运动,特别是在涉及到旋转和球形轨道的场景中,能够提供更直观和灵活的控制。无论是行星的轨道运动还是粒子系统的发射效果,球坐标系都能有效地简化计算和实现。通过合理的参数设置和更新逻辑,可以创造出丰富多彩的运动效果,增强游戏的视觉体验。
在计算机图形学中,光照和阴影的计算是实现真实感渲染的关键部分。使用球坐标系来表示光源的位置和方向,可以简化光照模型的实现,特别是在处理点光源和聚光灯时。以下是关于如何在光照模型中使用球坐标系的详细讨论。
1. 光源位置的表示
在光照模型中,光源的位置可以用球坐标系来表示,特别是在需要动态调整光源位置的情况下。通过调整 r、θ 和
ϕ,可以轻松地改变光源的位置和方向。
1.1. 光源位置的转换
将光源的球坐标转换为笛卡尔坐标,可以使用以下公式:
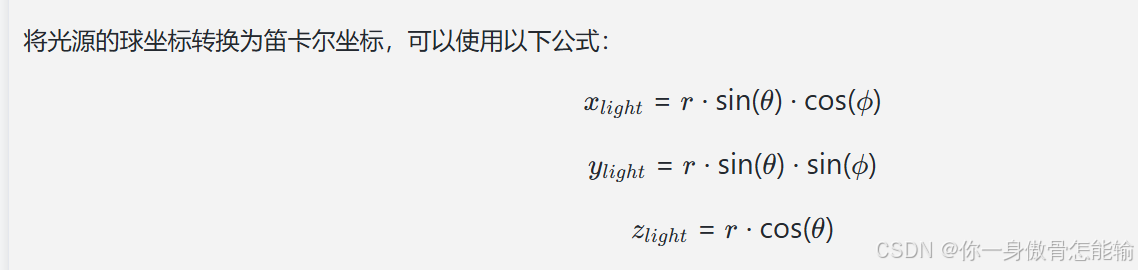
1.2. 代码示例
以下是一个简单的伪代码示例,展示如何使用球坐标系来更新光源的位置:
// 初始化光源参数
float r = 10.0; // 光源到原点的距离
float theta = π / 4; // 光源的极角
float phi = 0; // 光源的方位角
function updateLightPosition():
// 更新光源位置
x_light = r * sin(theta) * cos(phi)
y_light = r * sin(theta) * sin(phi)
z_light = r * cos(theta)
// 设置光源的位置
setLightPosition(x_light, y_light, z_light)
2. 环境光照计算
在计算环境光照时,使用球坐标系可以更方便地处理光线的传播和反射。环境光照通常是指在场景中均匀分布的光线,影响物体的整体亮度。
2.1. 环境光照模型
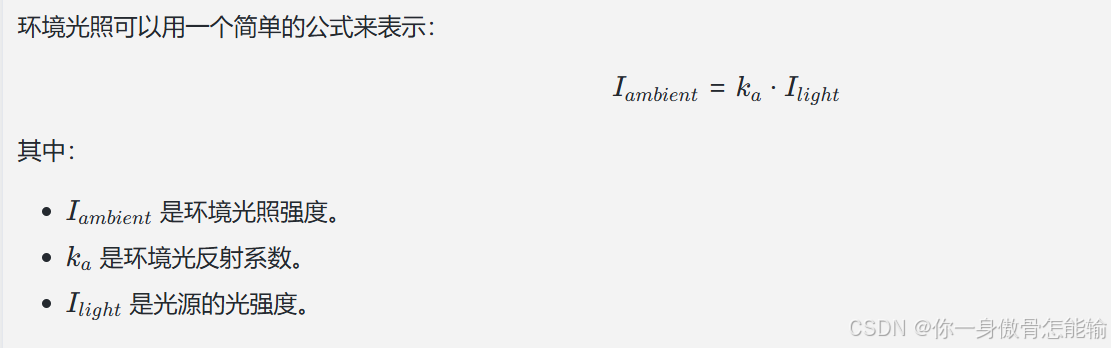
2.2. 代码示例
以下是一个简单的伪代码示例,展示如何计算环境光照:
// 初始化环境光参数
float k_a = 0.1; // 环境光反射系数
float I_light = 1.0; // 光源的光强度
function calculateAmbientLight():
// 计算环境光照强度
I_ambient = k_a * I_light
// 返回环境光照强度
return I_ambient
3. 光照模型中的阴影计算
在光照模型中,阴影的计算通常涉及到光源与物体之间的关系。使用球坐标系可以简化这一过程,特别是在处理动态光源时。
3.1. 阴影计算的基本思路
阴影的计算通常包括以下步骤:
- 确定光源的位置。
- 计算光线与物体的交点。
- 判断交点是否在光源的照射范围内。
3.2. 代码示例
以下是一个简单的伪代码示例,展示如何计算阴影:
function calculateShadow(objectPosition, lightPosition):
// 计算光线方向
direction = normalize(lightPosition - objectPosition)
// 检查光线与物体的交点
if intersects(object, direction):
// 如果有交点,返回阴影强度
return shadowIntensity
else:
// 如果没有交点,返回无阴影
return 0
4. 总结
使用球坐标系来表示光源的位置和方向,可以简化光照和阴影计算的实现。通过动态调整光源的参数,可以轻松地模拟点光源和聚光灯的效果。同时,使用球坐标系处理环境光照和阴影计算,可以提高计算的灵活性和效率。这些技术在游戏开发和计算机图形学中都具有重要的应用价值。
碰撞检测是计算机图形学和游戏开发中的一个重要方面,尤其是在处理物体之间的交互时。使用球坐标系可以简化碰撞检测的计算,特别是在处理球形物体或定义球形区域时。以下是关于如何在球坐标系中实现碰撞检测的详细讨论。
1. 球形碰撞检测
对于球形物体,碰撞检测的基本思路是计算两个球体之间的距离,并判断这个距离是否小于它们的半径之和。
1.2. 使用球坐标系进行碰撞检测
在球坐标系中,球体的中心位置可以用 r、θ 和 ϕ 表示。我们可以将球体的中心位置转换为笛卡尔坐标,然后进行距离计算。
代码示例
以下是一个简单的伪代码示例,展示如何使用球坐标系进行球形碰撞检测:
function isColliding(sphereA, sphereB):
// 将球体 A 的球坐标转换为笛卡尔坐标
x_A = sphereA.r * sin(sphereA.theta) * cos(sphereA.phi)
y_A = sphereA.r * sin(sphereA.theta) * sin(sphereA.phi)
z_A = sphereA.r * cos(sphereA.theta)
// 将球体 B 的球坐标转换为笛卡尔坐标
x_B = sphereB.r * sin(sphereB.theta) * cos(sphereB.phi)
y_B = sphereB.r * sin(sphereB.theta) * sin(sphereB.phi)
z_B = sphereB.r * cos(sphereB.theta)
// 计算距离
distance = sqrt((x_B - x_A)^2 + (y_B - y_A)^2 + (z_B - z_A)^2)
// 检查是否发生碰撞
return distance <= (sphereA.radius + sphereB.radius)
2. 区域检测
在游戏中,使用球坐标系可以定义某个区域(例如,攻击范围、视野范围等),通过 ( r ) 和角度来判断物体是否在该区域内。
2.1. 定义区域

2.2. 角度限制
如果需要进一步限制区域(例如,攻击范围只在某个角度范围内),可以使用θ 和 ϕ 来判断物体是否在该角度范围内。
代码示例
以下是一个简单的伪代码示例,展示如何使用球坐标系进行区域检测:
function isInArea(objectPosition, areaCenter, areaRadius, angleLimit):
// 计算物体与区域中心的距离
distance = sqrt((objectPosition.x - areaCenter.x)^2 +
(objectPosition.y - areaCenter.y)^2 +
(objectPosition.z - areaCenter.z)^2)
// 检查物体是否在半径范围内
if distance > areaRadius:
return false
// 计算物体的球坐标
r = distance
theta = acos((objectPosition.z - areaCenter.z) / r)
phi = atan2(objectPosition.y - areaCenter.y, objectPosition.x - areaCenter.x)
// 检查物体的角度是否在限制范围内
return (theta <= angleLimit.thetaMax) && (theta >= angleLimit.thetaMin) &&
(phi <= angleLimit.phiMax) && (phi >= angleLimit.phiMin)
3. 总结
使用球坐标系进行碰撞检测和区域检测可以显著简化计算,特别是在处理球形物体和定义球形区域时。通过计算物体之间的距离和角度,可以有效地判断是否发生碰撞或物体是否在特定区域内。这种方法在游戏开发中非常实用,能够提高性能并简化逻辑。
当然可以!我们可以进一步探讨碰撞检测的其他方面,包括更复杂的碰撞检测算法、不同形状的碰撞检测、以及如何在实际游戏开发中实现这些技术。以下是一些相关主题的详细讨论。
4. 复杂形状的碰撞检测
除了球形物体,游戏中还会涉及到其他形状的物体,如立方体、平面、多边形等。对于这些形状,碰撞检测的算法会更加复杂。
4.1. 轴对齐包围盒(AABB)
轴对齐包围盒是一种简单的碰撞检测方法,适用于长方体形状的物体。AABB的边界与坐标轴对齐,可以通过比较物体的最小和最大坐标来判断是否发生碰撞。
碰撞检测算法
对于两个AABB,假设它们的最小和最大坐标分别为:
- AABB1: ( (min_x1, min_y1, min_z1) ) 和 ( (max_x1, max_y1, max_z1) )
- AABB2: ( (min_x2, min_y2, min_z2) ) 和 ( (max_x2, max_y2, max_z2) )
可以通过以下条件判断是否发生碰撞:
if (max_x1 < min_x2) or (min_x1 > max_x2) or
(max_y1 < min_y2) or (min_y1 > max_y2) or
(max_z1 < min_z2) or (min_z1 > max_z2):
return false // 没有碰撞
return true // 发生碰撞
4.2. 有限元法(Convex Hull)
对于更复杂的形状,可以使用有限元法(Convex Hull)来进行碰撞检测。有限元法将物体的形状简化为一个凸包,碰撞检测可以通过检查两个凸包是否相交来实现。
碰撞检测算法
常用的算法包括GJK(Gilbert-Johnson-Keerthi)算法和EPA(Expanding Polytope Algorithm)。这些算法可以有效地判断两个凸形状是否相交。
5. 碰撞检测的优化
在游戏开发中,碰撞检测可能会成为性能瓶颈,因此需要进行优化。以下是一些常见的优化技术:
5.1. 空间划分
通过将场景划分为多个区域,可以减少需要进行碰撞检测的物体数量。常见的空间划分方法包括:
- 四叉树(Quadtree):适用于2D场景,将空间递归划分为四个象限。
- 八叉树(Octree):适用于3D场景,将空间递归划分为八个部分。
- 网格划分:将场景划分为固定大小的网格,物体只与同一网格中的物体进行碰撞检测。
5.2. 碰撞分组
将物体分为不同的组,只对可能发生碰撞的组进行检测。例如,动态物体与静态物体之间的碰撞检测可以单独处理。
5.3. 早期退出
在碰撞检测过程中,如果发现某个条件不满足,可以立即退出检测,避免不必要的计算。例如,在AABB碰撞检测中,如果发现两个AABB在某个维度上没有重叠,可以直接返回没有碰撞。
6. 实际应用中的碰撞检测
在实际的游戏开发中,碰撞检测通常与物理引擎结合使用。物理引擎提供了更复杂的碰撞检测和响应机制,能够处理物体之间的相互作用、摩擦、弹性等。
6.1. 使用物理引擎
常见的物理引擎包括:
- Box2D:适用于2D游戏,提供了简单的碰撞检测和物理模拟。
- Bullet:适用于3D游戏,支持复杂的物理模拟和碰撞检测。
- Unity Physics:Unity引擎内置的物理引擎,提供了丰富的碰撞检测和物理效果。
6.2. 碰撞事件处理
在游戏中,碰撞检测不仅仅是判断是否发生碰撞,还需要处理碰撞事件。例如,当角色与敌人发生碰撞时,可能需要减少生命值、播放动画等。可以通过事件系统来处理这些碰撞事件。
7. 总结
碰撞检测是游戏开发中的一个重要组成部分,涉及到多种形状和复杂的算法。使用球坐标系可以简化球形物体的碰撞检测,而对于其他形状,则需要使用不同的算法和优化技术。通过空间划分、碰撞分组和早期退出等方法,可以提高碰撞检测的性能。在实际应用中,结合物理引擎可以实现更复杂的碰撞响应和物理效果。
在角色动画和控制中,球坐标系确实可以提供一些独特的优势,特别是在处理旋转和路径动画时。以下是对这两个方面的详细讨论。
1. 角色旋转
角色的旋转通常涉及到多个关节的运动,使用球坐标系可以简化这些旋转的计算,尤其是在需要实现自然的运动时。
1.1. 角色的关节旋转
在球坐标系中,角色的关节(如头部、身体、四肢)可以通过调整角度 ( \theta )(极角)和 ( \phi )(方位角)来实现旋转。以下是如何使用球坐标系来控制角色关节旋转的基本思路:
- 头部旋转:通过调整头部的 ( \theta ) 和 ( \phi ) 值,可以实现头部的上下和左右旋转。
- 身体旋转:身体的旋转可以通过调整身体的 ( \theta ) 值来实现,通常与头部的旋转相结合。
- 四肢旋转:四肢的旋转可以通过调整相应的关节角度来实现,使用球坐标系可以更直观地控制四肢的运动。
代码示例
以下是一个简单的伪代码示例,展示如何使用球坐标系来控制角色的头部旋转:
function rotateHead(character, deltaTheta, deltaPhi):
character.head.theta += deltaTheta
character.head.phi += deltaPhi
// 更新头部的方向向量
character.head.direction.x = sin(character.head.theta) * cos(character.head.phi)
character.head.direction.y = sin(character.head.theta) * sin(character.head.phi)
character.head.direction.z = cos(character.head.theta)
1.2. 自然运动
使用球坐标系可以更容易地实现自然的运动。例如,当角色转头时,身体和四肢的运动可以通过相对的角度调整来实现,从而使得动画看起来更加流畅和自然。
2. 路径动画
在某些情况下,角色可以沿着球形路径移动,使用球坐标系可以方便地计算角色在路径上的位置。
2.1. 球形路径的定义
球形路径可以通过定义一个中心点和一个半径来表示。角色在路径上的位置可以通过调整角度 ( \theta ) 和 ( \phi ) 来实现。
代码示例
以下是一个简单的伪代码示例,展示如何在球形路径上移动角色:
function moveAlongSpherePath(character, deltaTheta, deltaPhi):
// 更新角色的球坐标
character.position.theta += deltaTheta
character.position.phi += deltaPhi
// 计算角色的新位置
character.position.x = character.radius * sin(character.position.theta) * cos(character.position.phi)
character.position.y = character.radius * sin(character.position.theta) * sin(character.position.phi)
character.position.z = character.radius * cos(character.position.theta)
2.2. 路径动画的应用
路径动画可以用于多种场景,例如:
- 角色在球形场景中的移动:角色可以在一个球形的环境中自由移动,使用球坐标系可以方便地计算角色在场景中的位置。
- 摄像机跟随:摄像机可以沿着球形路径移动,以保持对角色的跟随视角。
- 特效和粒子系统:在某些特效中,粒子可以沿着球形路径发射,使用球坐标系可以简化粒子的运动计算。
3. 结合物理引擎
在实际的游戏开发中,角色动画和控制通常与物理引擎结合使用,以实现更真实的运动和碰撞效果。物理引擎可以处理角色的重力、摩擦和碰撞等因素,从而使得角色的运动更加自然。
4. 总结
使用球坐标系在角色动画和控制中可以简化旋转和路径动画的计算。通过调整角度 ( \theta ) 和 ( \phi ),可以实现角色的自然运动和沿球形路径的移动。这种方法在游戏开发中非常实用,能够提高动画的流畅性和表现力。



















 2350
2350

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











