







👉👉👉**推荐硬件链接,店家提供全程指导**👈👈👈
文章目录
前言
交流学习加qq:2096723956
更多保姆级PX4+ROS学习视频:https://b23.tv/ZeUDKqy
硬件:pix2.4.8飞控,天捷力新小胖固定翼航模
软件:PX4 1.14.0,QGC地面站

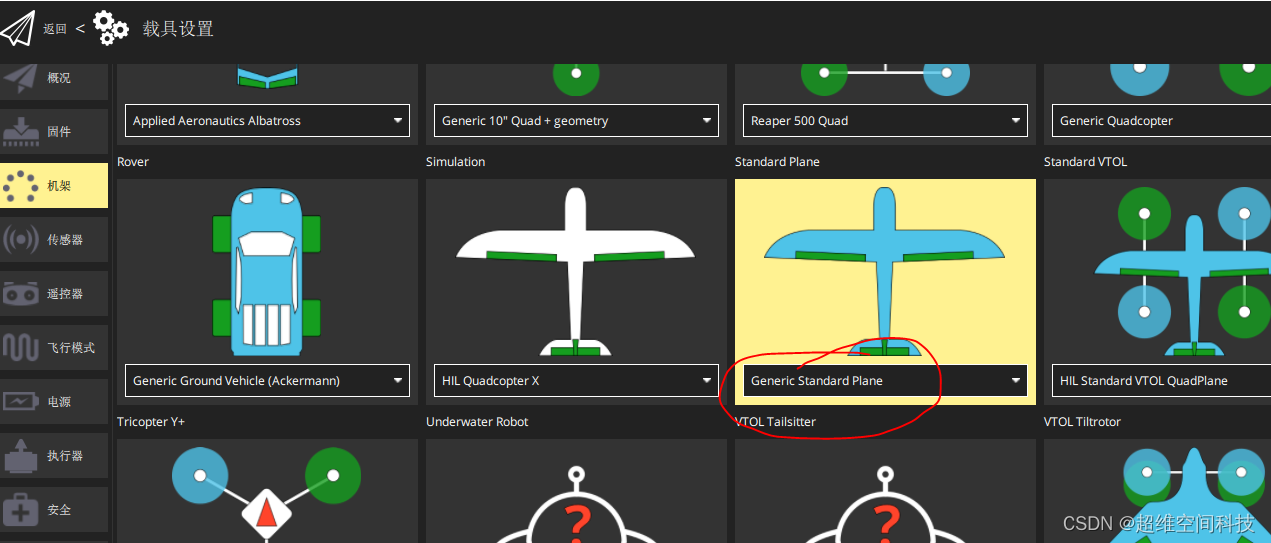
一、设置机型
选择机架类型为
二、分配输出
接口分配如下:注意本文使用的新小胖为V尾,而不是垂尾,所以要设置Servo3为Letf V-Tail,Servo4为Right V-Tail。
对应的输出通道分配为辅助通道PWM AUX。4个舵机设置为前四个通道,PWM 50Hz(很多舵机不支持400Hz,使用400Hz容易烧)。电机设置为第五个通道,PWM400Hz。

然后将舵机和电机的信号线按顺序接到飞控的AUX1-5.

飞控IO通道的12接两个副翼,3接升降舵,4接方向舵,5接电机
接好线的飞机内部图如下:
PIXHAWK4原装的PM07电流计体积较大,这里推荐采用pm02电流计,方便安装.需要注意的是,我这里采用的电调是自带5V输出的,如果电调没有5V输出的话,需要外接一个UBEC(将电池电压转换为5V的稳压模块)给舵机供电,UBEC的正负极接电源,输出插在飞控的信号输出排针上.
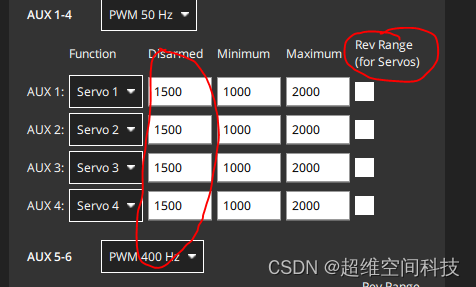
三、调平舵面及设置PWM输出正反
接好线后,给飞机上电,如果初始舵面不平,可以调节对应通道的Disarmed值,直到舵面和翼面持平,调完Disarmed值后,Minimum和Maxmum也相应的增加或减小。如果舵面的响应反了,勾选右侧的Rev Range即可。


















 5475
5475

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











