






参考:
https://docs.ros.org/en/jazzy/Installation/Ubuntu-Install-Debians.html先要安装一个ubuntu,对老旧硬件最友好的版本Lubuntu:
过程:
按文档一步步走下去:

遇到问题查找通用案例或者询问人工智能大模型即可得到解决。
ROS 2 Jazzy Jalisco
开局就有1732个功能包!非常强大了。

果断安装desktop-full:
sudo apt install ros-jazzy-desktop-full
![]()
大模型在24年5月27日还没有识别这个版本的ROS2。
很抱歉,但"Jazzy Jalisco"并不是一个ROS 2的发行版名称。ROS 2的发行版通常以字母顺序命名,比如Foxy, Galactic, Humble等。因此,我无法为你提供一个针对"Jazzy Jalisco"的安装指南,因为这个版本名称可能是不存在的或者是一个误解。
不过,我可以为你提供一个通用的ROS 2安装过程概述,你可以根据这个概述来安装任何现有的ROS 2发行版。以下是在Ubuntu上安装ROS 2的大致步骤:
1. 设置语言环境
确保你的系统支持UTF-8编码。你可以通过以下命令来检查和设置:
bash复制代码
locale # 检查是否支持 UTF-8 | |
sudo apt update && sudo apt install locales | |
sudo locale-gen en_US en_US.UTF-8 | |
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8 | |
export LANG=en_US.UTF-8 | |
locale # 验证设置是否成功 |
2. 启动Ubuntu universe存储库
你可以通过图形化界面或命令行来启动Ubuntu universe存储库。以下是命令行方式:
bash复制代码
sudo apt update && sudo apt install software-properties-common | |
sudo add-apt-repository universe |
3. 设置软件源
首先,你需要添加ROS 2的APT密钥,并将ROS 2的软件源添加到系统中。这个过程可能会因ROS 2的不同发行版而略有不同。以下是一个通用的例子:
bash复制代码
sudo apt update && sudo apt install curl gnupg2 lsb-release | |
curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg | |
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(lsb_release -cs) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null |
4. 安装ROS 2
在设置了软件源之后,你可以使用APT来安装ROS 2。以下是一个安装ROS 2桌面版的例子:
bash复制代码
sudo apt update | |
sudo apt install ros-<distro>-desktop |
请将<distro>替换为你想要安装的ROS 2发行版的名称,比如foxy、galactic、humble等。
5. 配置环境
安装完成后,你需要将ROS 2的环境变量添加到你的bash配置文件中,以便在每次打开新的终端时都能自动加载。以下是一个例子:
bash复制代码
echo "source /opt/ros/<distro>/setup.bash" >> ~/.bashrc | |
source ~/.bashrc |
同样,请将<distro>替换为你安装的ROS 2发行版的名称。
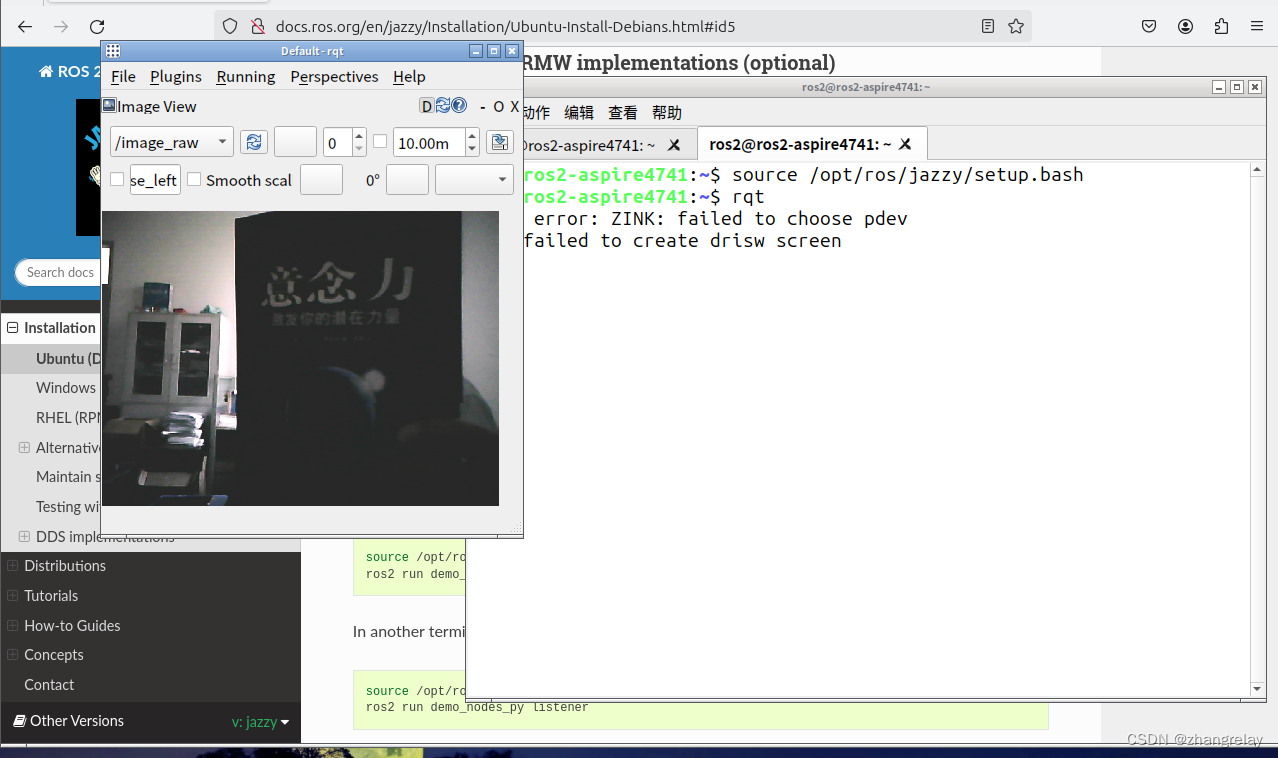
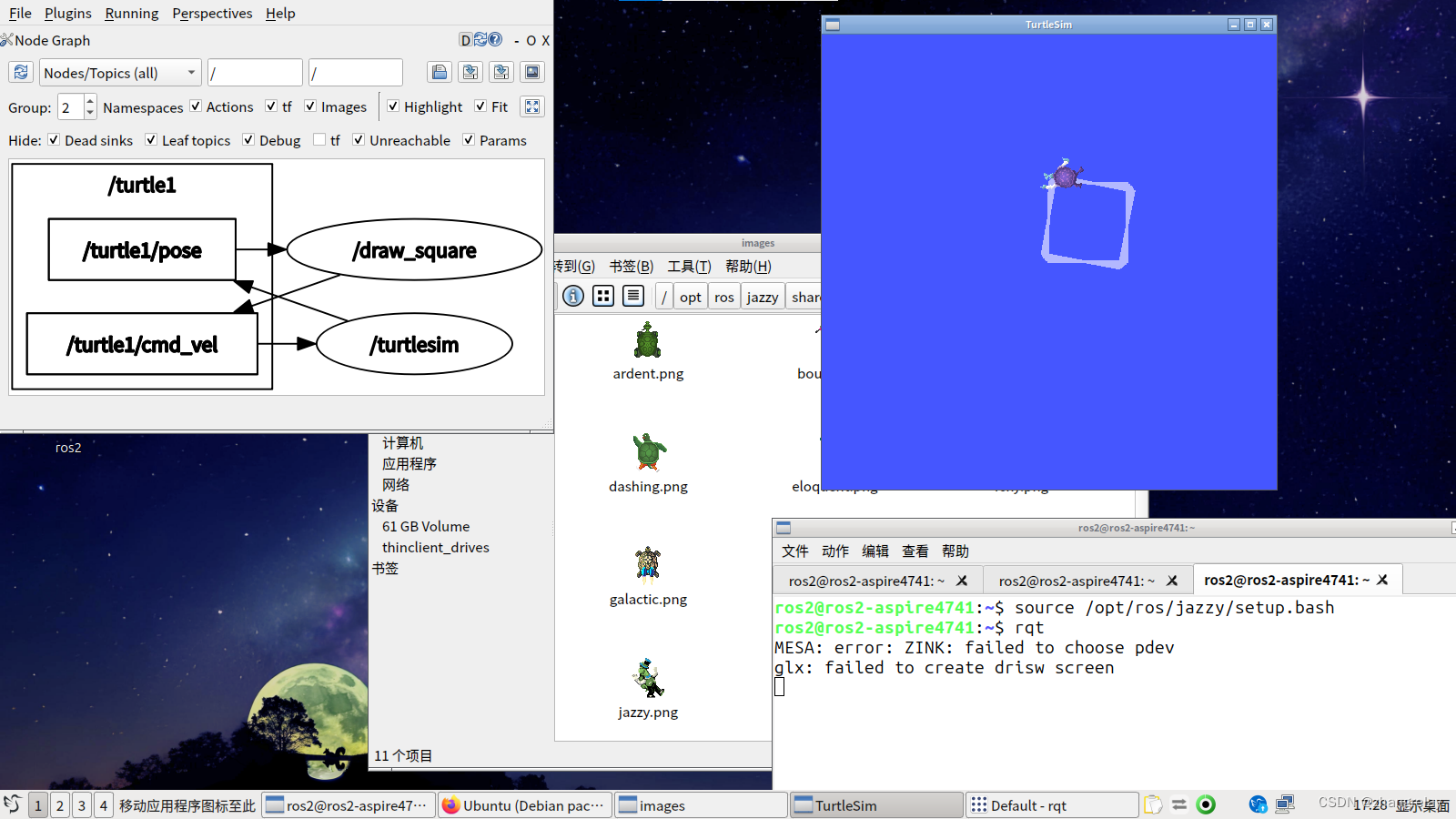
6. 测试ROS 2安装
你可以通过运行一些示例节点来测试你的ROS 2安装是否成功。比如:
bash复制代码
ros2 run demo_nodes_cpp talker |
在另一个终端中运行:
bash复制代码
ros2 run demo_nodes_cpp listener |
如果你能看到talker节点发布消息,并且listener节点能够接收到这些消息,那么你的ROS 2安装就是成功的。


















 4301
4301

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











