









mujoco机器人建模教程和优质资源总结-长期更新
前言
最近要利用mujoco搭建一个定制化的击球模型,有一些基础的功能我找不到实现的例程。因此想着能不能做一个归纳和总结,在准备向社区“白嫖”之前,先分享一下我之前的一些经验。
将分为下面几个步骤开始:
- mujoco安装教程
- mujoco的注册问题
- mujoco-py常见bug;
- mujoco-py的系列例程
- 基于mujoco-py的机器人仿真优质代码库推荐;
- 优质博客推荐
- 待解决问题
一、mujoco安装教程:
-
Linux系统完善教程,兼容Ubuntu16.04和Ubuntu18.04:
快速安装最新版mujoco200, mujoco-py2.2.0.7,gym[all],robosuite,解决gcc等报错问题 -
Windows安装,没有试过;
-
云服务器安装,也没有试过,如果能有权限安装的话,和Linux安装应该区别不大。
二、mujoco激活过期问题
这个应该困扰了不少同学,我之前甚至搜到有人自己想办法pj注册码,但是那位没有公开方法~
其实不用那么复杂,一台主机,一年准备一个新的教育邮箱就行了。实验室做cv的师兄弟们终于又有用了~
不用管Linux_id是不是一样,它只管你的邮箱是不是被注册过。
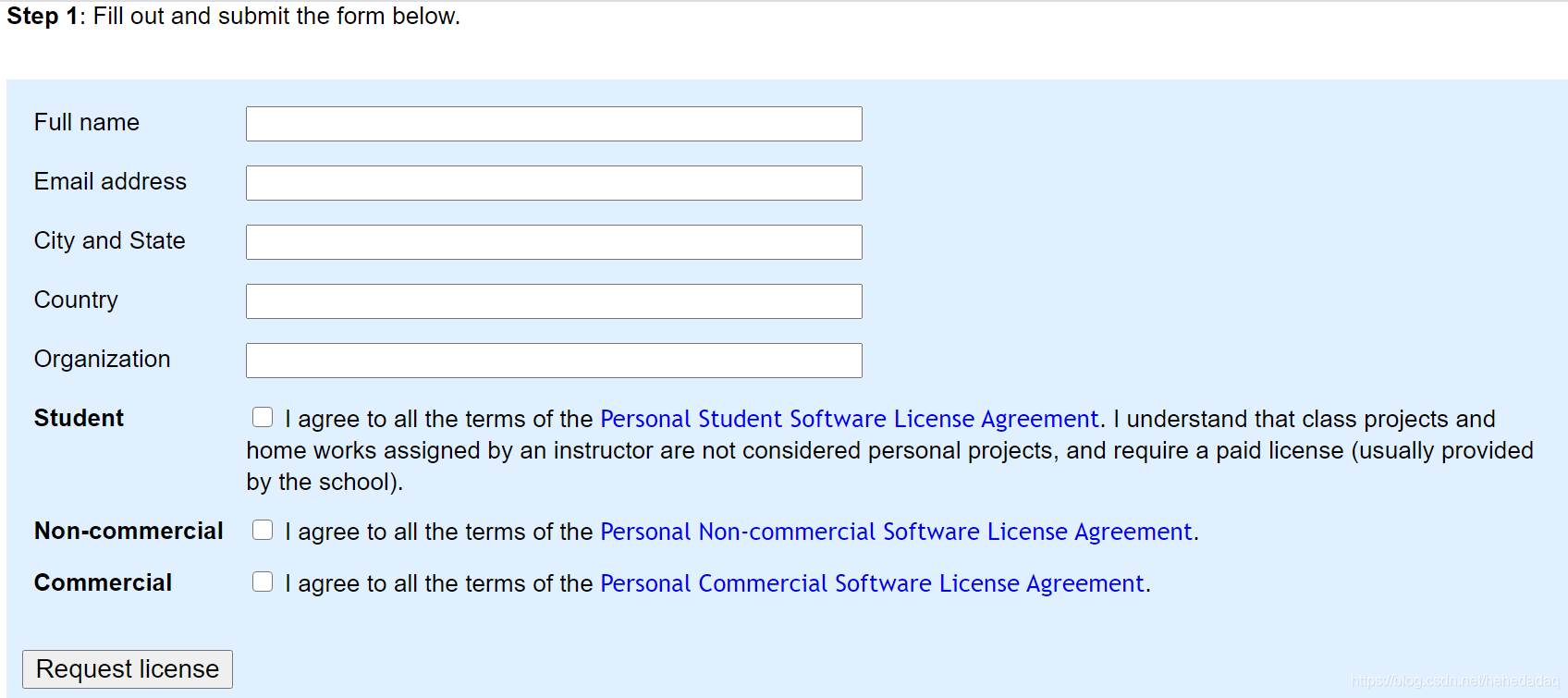
注(白)册(嫖)流程:
-
自己的教育邮箱注册一个月试用,白嫖一个月,IP地址和Linux_id不重要,正常操作就行;
-
一个月没用完之前,记得用自己的教育邮箱提前申请一年的学生账号,这个申请时间比较长,记得稍微提前三五个工作日。
-
申请成功后,会收到下面的邮件:
Dear XXX,
Thank you for your interest in MuJoCo Pro. Your account is now active. The account number is
----F4C7E388C5463A29F7------
You can use it to register your Computer id on our website. An activation key needed to run MuJoCo Pro will be emailed to you automatically after successful registration.
The Personal Student Software License Agreement is attached for your reference.
Roboti LLC Licensing
复制粘贴其中的account number,输入到下面,其中的computer id其实之前用过一点关系都没有,也不用管IP地址。
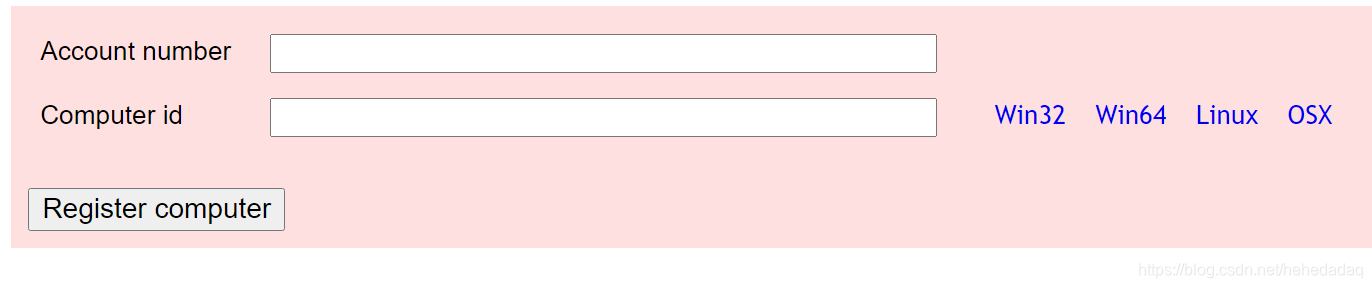
- 立刻会收到mjkey.txt,如果没有立刻收到邮件,可能是你们学校的教育邮箱对这些邮件有拦截,看看是不是在垃圾箱。如果是jg相关的院校,可能是直接被防火墙给拦截一段时间。
- 复制粘贴覆盖原本过期的就行了。又能使用一年。
- 下一年得换个邮箱,先白嫖一个月,再白嫖一年。
三、mujoco-py常见bug
mujoco-py安装会有各种各样的bug.
常见的基本上在上面的教程中都有体现;
如果有其他的bug,可以先去mujoco-py的issues上看看,一般都能找到解决方案;
有典型的欢迎大家一起讨论~
四、mujoco-py的例程
待更新
1. 创建系统默认对象
2. 渲染场景
3. 设定对象常见属性
3.1 设定物体的初始速度:
示例提问和回答:
Q1:请问mujoco仿真可以在哪里设置模型的初始速度吗?不知道是应该在xml文件里设置还是在控制程序里设置?
A1:通过sim.data.set_joint_qvel函数设定,或者sim.data.qvel[i]=5直接赋值。
其中sim.data.qvel[i]是得给定joint的index,set_joint_qvel函数,顾名思义是给定joint的name,才能设定速度值。
示例图片:
4. 修改对象常见属性
5. 驱动对象
6. 弹性碰撞
7. 获取传感器信息
8. 场景设置:空气、灯光、相机
9. 其他域随机化操作
- robosuite最新版有了一些相机、纹理的域随机化操作。
- 也可以定制化一些灯光的随机化,需要的话可以加群讨论
10. 创建复合对象
- robosuite最新版有例程,我没试过;
11. 外部导入机器人模型
- 在MUJOCO建立机器人模型:BUILDING MODELS IN MUJOCO
包括如何从Skechup(草图大师)创建模型,导出stl文件;
到提供xml文件模板,比较齐全
12. 模块化搭建机器人模型:robosuite
超详细的文档!http://robosuite.ai/docs/overview.html
五、基于mujoco-py的机器人仿真优质代码库推荐:
- gym-fetch:机械臂系列:slide,push,pick and place。
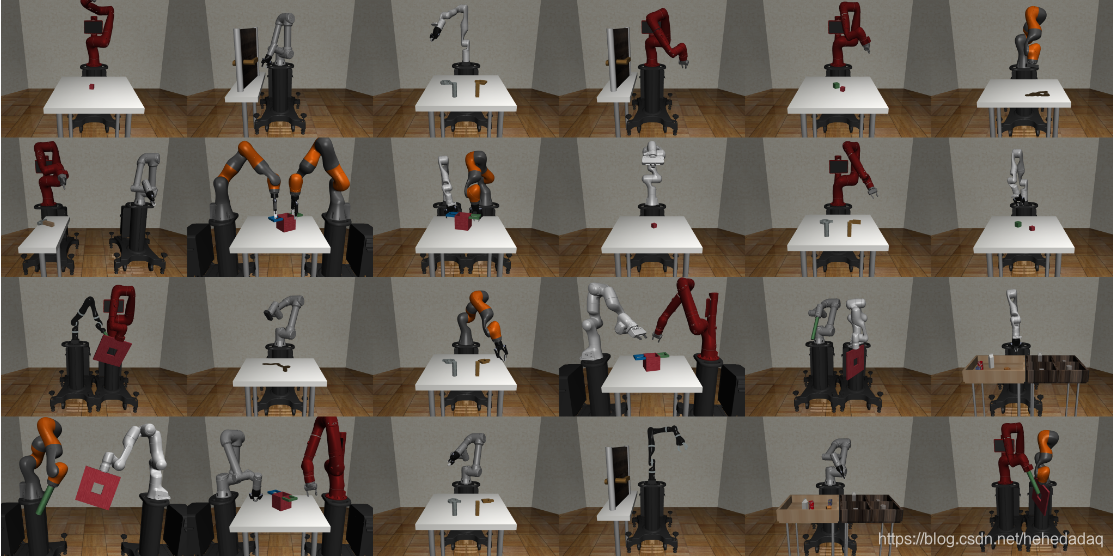
- robosuite:如果做机械臂相关的必看!斯坦福开源的Surreal机器人项目,基于Mujoco,包含单/双臂与多种手爪组合配置,task包括pick&place、装配协作等。
- flow-rl:如果做击球相关的,可以参考一下。
六、优质博客推荐:
PyBullet笔记(一)pybullet及其依赖项的安装、pybullet初探
联系方式:
ps: 欢迎做强化的同学加群一起学习:
深度强化学习-DRL:799378128
mujoco建模群:818977608
欢迎关注知乎帐号:未入门的炼丹学徒
CSDN帐号:https://blog.csdn.net/hehedadaq
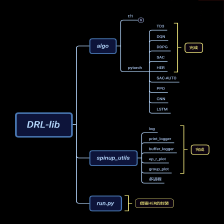
极简spinup+HER+PER代码实现:https://github.com/kaixindelele/DRLib


















 2399
2399

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











