







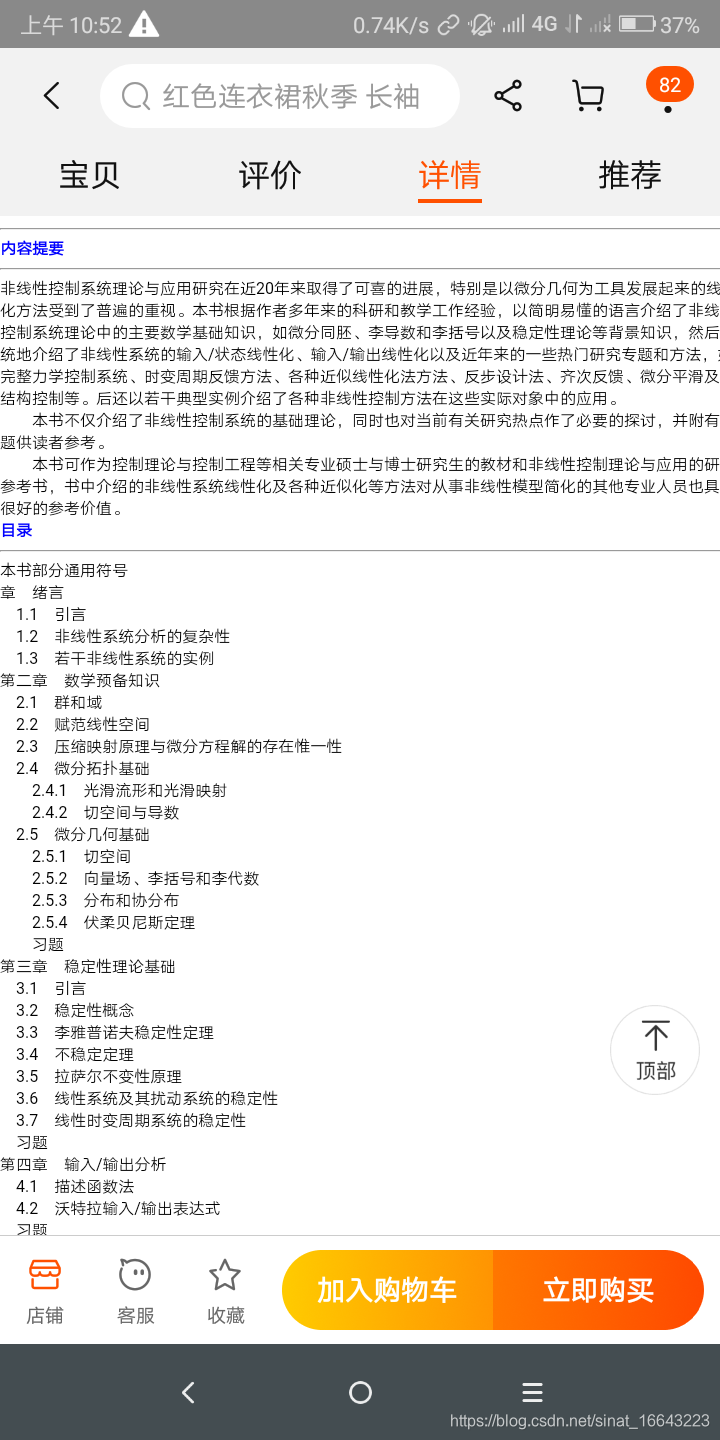
之前看别人论文里面什么稳定性,好像都是这个书里面有讲,我需要把这方面的基础知识补一下。
这个人把滑模控制放在非线性控制理论里面讲。
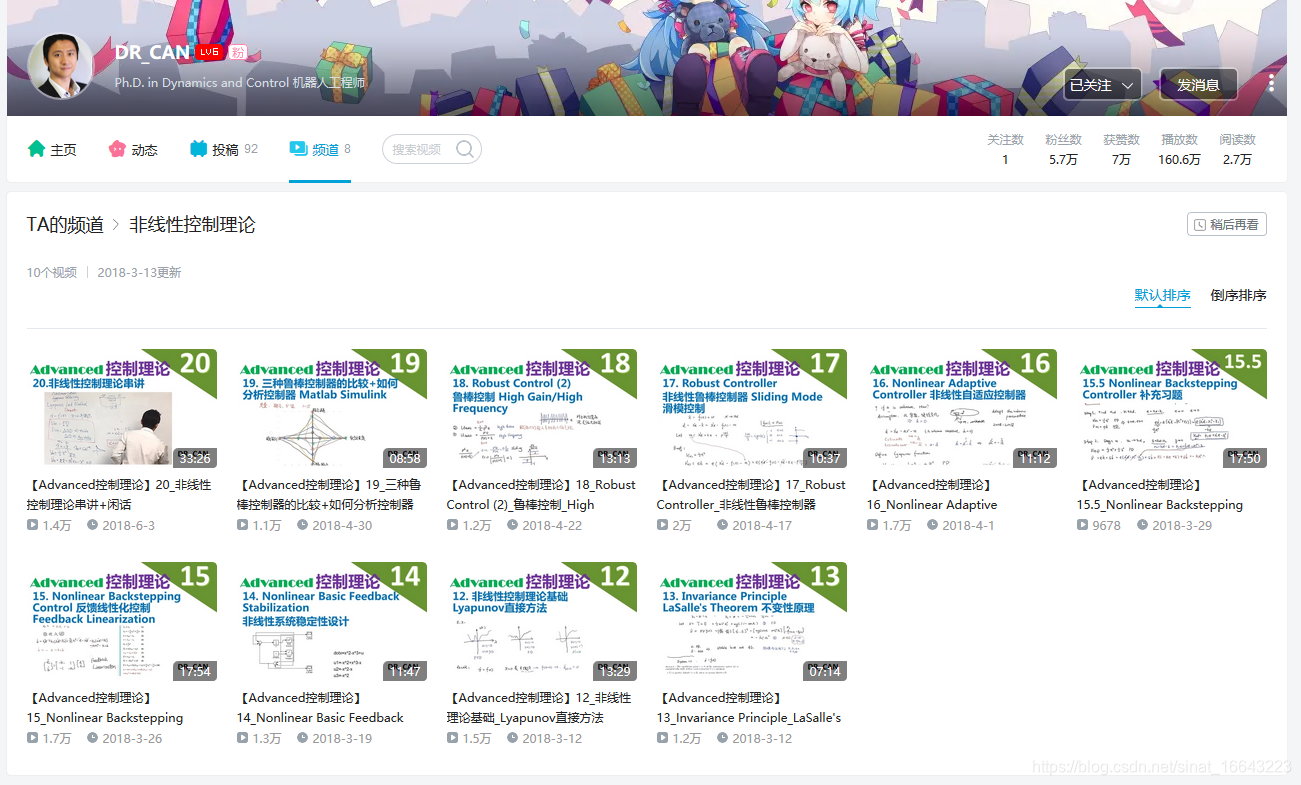
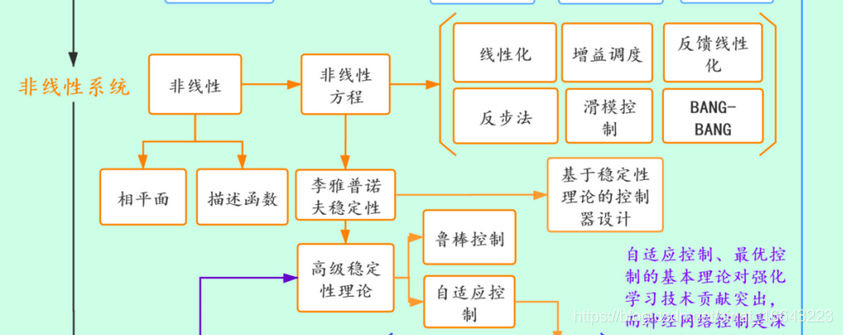
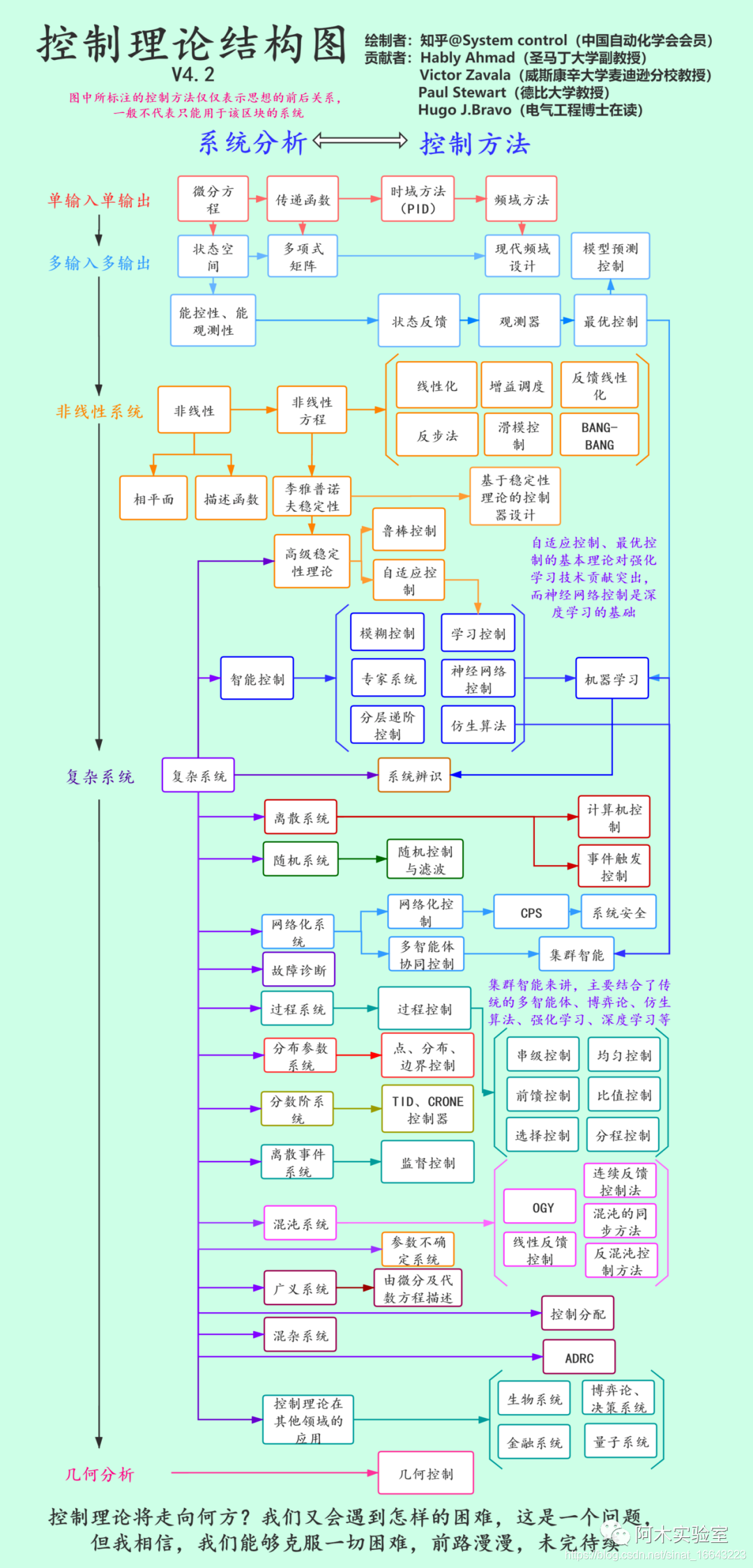
看这个控制理论结构图也能看得出来,从这个图也可以看出导师之前弄的复杂系统似乎更前一些。这几天看了这么多无人机或者欠驱动系统的控制方法,比较乱,现在看到这张图,顿时有一种理顺的感觉有没有。 PID是这里面最基础的方法。我还有很多东西需要学。
可以看到无人机里面很多控制方法就在这里
https://blog.csdn.net/sinat_16643223/article/details/106910379
还是去看最新版的图吧,在 https://blog.csdn.net/sinat_16643223/article/details/108882423



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











