







 本文介绍了一种名为DeepVCP的端到端深度学习点云配准框架,它能实现与最新几何方法相当的配准精度。DeepVCP的关键创新在于学习匹配概率生成对应点,提高了配准准确性。该方法在KITTI和Apollo SouthBay数据集上验证,显示出与传统几何方法相当的精度和更高的鲁棒性,尤其在处理不精确初始姿态时。
本文介绍了一种名为DeepVCP的端到端深度学习点云配准框架,它能实现与最新几何方法相当的配准精度。DeepVCP的关键创新在于学习匹配概率生成对应点,提高了配准准确性。该方法在KITTI和Apollo SouthBay数据集上验证,显示出与传统几何方法相当的精度和更高的鲁棒性,尤其在处理不精确初始姿态时。
点云配准的端到端深度神经网络:ICCV2019论文解读
DeepVCP: An End-to-End Deep Neural Network
for Point Cloud Registration
论文链接:
http://openaccess.thecvf.com/content_ICCV_2019/papers/Lu_DeepVCP_An_End-to-End_Deep_Neural_Network_for_Point_Cloud_Registration_ICCV_2019_paper.pdf
摘要
本文提出了一种新的基于端到端学习的三维点云配准框架DeepVCP,其配准精度可与现有的最新几何方法相媲美。与通常需要RANSAC过程的其他基于关键点的方法不同,本文使用不同的深度神经网络结构来建立端到端的可训练网络。本文的关键点检测器通过这种端到端的结构进行训练,使系统能够避免动态对象的干扰,充分利用静止对象上的显著特征,从而实现高鲁棒性。与其在现有的点之间寻找对应的点,关键的贡献在于本文创新性地基于一组候选点之间的学习匹配概率生成它们,从而提高了配准的准确性。本文使用KITTI数据集和Apollo SouthBay数据集全面验证了本文的方法的有效性。结果表明,本文的方法与目前最先进的基于几何的方法相比,具有相当的配准精度和运行效率,但对不精确的初始姿态具有更高的鲁棒性。包括详细的消融和可视化分析,以进一步说明本文网络的行为和见解。该方法具有配准误差小、鲁棒性强的特点,对依赖点云配准的实际应用具有一定的吸引力。
- Introduction
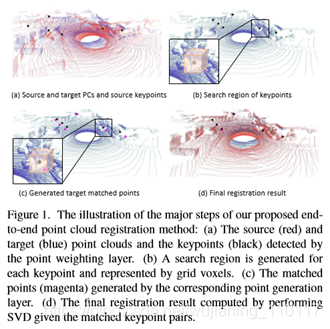
在这篇题为“DeepVCP”(虚拟对应点)的工作中,本文提出了一种基于端到端学习的方法来精确对齐两个不同的点云。DeepVCP这个名字准确地抓住了虚拟对应点生成步骤的重要性,这是本文方法中提出的关键创新设计之一。本文的框架的概述如图1所示。本文首先使用最新的点云特征提取网络PointNet++[31]从源点云和目标点云中提取每个点的语义特征。它们被期望具有一定的语义,以使本文的网络能够避免动态对象,并关注那些有利于配准的稳定和独特的特征。为了进一步实现这一目标,本文在源点云中选择对配准任务最重要的关键点,利用点加权层通过学习过程为提取的特征分配匹配权重。为了解决点云的局部稀疏性问题,提出了一种基于特征描述子提取过程的点云生成方法。本文相信这是提高配准精度的关键贡献。最后,除了利用源关键点与生成的对应点之间的L1距离作为损失外,本文还提出了通过自适应地合并关键点权重并使用TensorFlow中新引入的SVD算子执行一次优化迭代来构造另一个对应点。关键点和这个新生成的对应点之间的L1距离再次被用作另一个损失。与第一个仅使用局部相似性的损失不同,这个新引入的损失在局部关键点之间建立了统一的几何约束。通过端到端的闭环训练,DNNs可以很好地进行泛化,选择最佳的关键点进行配准。
总之,本文的主要贡献是:
•据本文所知,本文的工作是第一个基于端到端学习的点云配准框架,其结果与以前的原始几何状态相当。
•本文的基于学习的关键点检测、新的对应点生成方法以及融合了局部相似性和全局几何约束的损失函数,在基于学习的配准任务中实现了高精度。
•使用KITTI[13]和Apollo SouthBay[25]数据集进行严格的测试和详细的融合分析,以充分证明所提出方法的有效性。
- Related Work
F.Pomerleau等人的调查工作。[29]对传统点云配准算法的发展进行了很好的概述。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









