







5.使用RCLPY编写节点
写在前面
- 当前平台文章汇总地址:ROS2机器人从入门到实战
- 获取完整教程及配套资料代码,请关注公众号<鱼香ROS>获取
- 教程配套机器人开发平台:两驱版| 四驱版
- 为方便交流,搭建了机器人技术问答社区:地址 fishros.org.cn
1.创建Python功能包
创建一个名字叫做example_py python版本的功能包。
cd chapt2/chapt2_ws/src/
ros2 pkg create example_py --build-type ament_python --dependencies rclpy
创建完成后的目录结构
.
├── example_py
│ └── __init__.py
├── package.xml
├── resource
│ └── example_py
├── setup.cfg
├── setup.py
└── test
├── test_copyright.py
├── test_flake8.py
└── test_pep257.py
3 directories, 8 files
2.编写程序
编写ROS2节点的一般步骤
1. 导入库文件
2. 初始化客户端库
3. 新建节点
4. spin循环节点
5. 关闭客户端库
在example_py/example_py下创建node_02.py接着我们开始编写代码。跟着小鱼一起边理解输入下面的代码,注释不用输。
import rclpy
from rclpy.node import Node
def main(args=None):
"""
ros2运行该节点的入口函数
编写ROS2节点的一般步骤
1. 导入库文件
2. 初始化客户端库
3. 新建节点对象
4. spin循环节点
5. 关闭客户端库
"""
rclpy.init(args=args) # 初始化rclpy
node = Node("node_02") # 新建一个节点
node.get_logger().info("大家好,我是node_02.")
rclpy.spin(node) # 保持节点运行,检测是否收到退出指令(Ctrl+C)
rclpy.shutdown() # 关闭rclpy
代码编写完成用Crtl+S进行保存。接着修改setup.py。
entry_points={
'console_scripts': [
"node_02 = example_py.node_02:main"
],
},
)
setup.py这段配置是声明一个ROS2的节点,声明后使用colcon build才能检测到,从而将其添加到install目录下。
完成上面的工作后,就可以编译运行了。
3.编译运行节点
打开vscode终端,进入chapt2/chapt2_ws/
3.1 编译节点
cd chapt2/chapt2_ws/
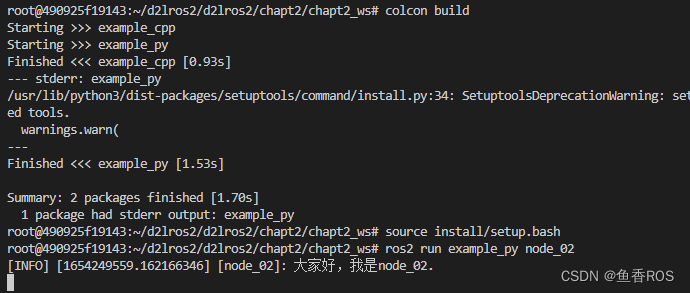
colcon build
--- stderr: example_py /usr/lib/python3/dist-packages/setuptools/command/install.py:34: SetuptoolsDeprecationWarning: setup.py install is deprecated. Use build and pip and other standards-based tools. warnings.warn( ---如果在编译中看到上述错误没关系,不影响使用,ros2官方正在修复。
错误原因是setuptools版本太高造成,使用下面的指令可以进行版本的回退。sudo pip install setuptools==58.2.0 --upgrade
3.2 source环境
source install/setup.bash
3.3 运行节点
ros2 run example_py node_02
运行结果
4.测试
当节点运行起来后,可以再尝试使用ros2 node list 指令来查看现有的节点。这个时候你应该能看到:
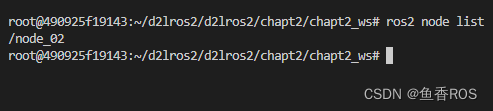
这说明你的节点已经运行起来了。
5.总结
本节我们学习了使用Python在工作空间的功能包里编写一个节点,代码是相同的,但是多了一些配置。
当然除了使用这种方法编写一个节点,还有其他方式,小鱼将其放到了进阶篇来讲。















 1973
1973











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









