







13.目标速度控制-运动学逆解
写在前面
- 当前平台文章汇总地址:ROS2机器人从入门到实战
- 获取完整教程及配套资料代码,请关注公众号<鱼香ROS>获取
- 教程配套机器人开发平台:两驱版| 四驱版
- 为方便交流,搭建了机器人技术问答社区:地址 fishros.org.cn
你好,我是小鱼。上一节我们推导并在代码中实现了运动学正解,本节我们来学习下运动学逆解,实现给定线速度和角速度,计算出轮子达到怎样的转速才能达到这个速度。
一、逆解推导
我们直接用正解结果进行求逆解即可。
v
=
(
v
l
+
v
r
)
/
2
ω
=
(
v
r
−
v
l
)
/
l
v=(v_l+v_r)/2 \\ {\omega} = (v_r-v_l)/l
v=(vl+vr)/2ω=(vr−vl)/l
所以有
v
l
=
v
−
ω
l
/
2
v
r
=
v
+
ω
l
/
2
v_l = v-\omega l/2 \\ v_r = v+\omega l/2
vl=v−ωl/2vr=v+ωl/2
二、编写代码
继续在上一节中的代码Kinematics.cpp中完善即可。
void Kinematics::kinematic_inverse(float linear_speed, float angular_speed, float &out_wheel1_speed, float &out_wheel2_speed)
{
out_wheel1_speed =
linear_speed - (angular_speed * wheel_distance_) / 2.0;
out_wheel2_speed =
linear_speed + (angular_speed * wheel_distance_) / 2.0;
}
三、下载测试
下载代码,运行agent,点击RST按键。
sudo docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged --net=host microros/micro-ros-agent:$ROS_DISTRO udp4 --port 8888 -v6
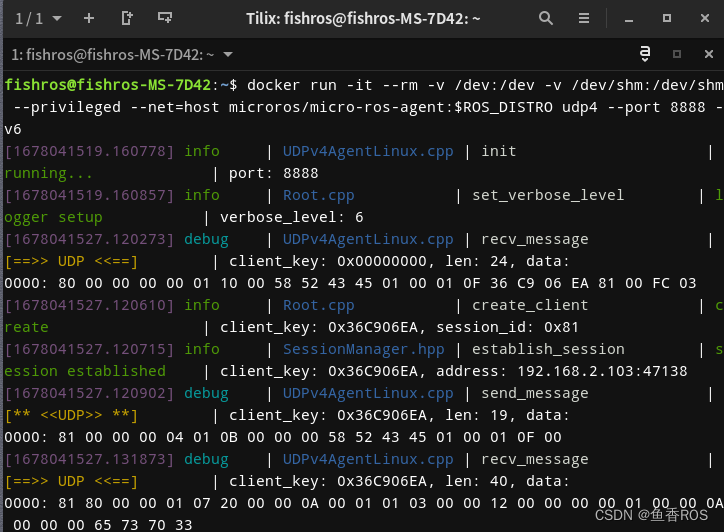
看到连接建立表示通信成功,接着用ros2 topic list
ros2 topic list
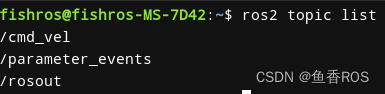
看到/cmd_vel表示正常,接着我们使用teleop_twist_keyboard进行键盘控制
ros2 run teleop_twist_keyboard teleop_twist_keyboard
先调整下速度,降低到0.05左右(50cm/s),然后使用i\j\j\k,测试。
四、总结
没啥好说的,记得提交下代码
git commit -m "feat(13.13):完成运动学逆解"
代码提交也是有规范的,我们一起来学习下:https://fishros.org.cn/forum/topic/390
我们采用用的比较多的Angular 规范
git commit -m "<type>(<scope>): <subject>"
其中 type(必选)、scope(可选)和 subject(必选)
Type
- feat:新功能(feature)。
- fix/to:修复bug,可以是QA发现的BUG,也可以是研发自己发现的BUG。
- fix:产生diff并自动修复此问题。适合于一次提交直接修复问题
- to:只产生diff不自动修复此问题。适合于多次提交。最终修复问题提交时使用fix
- docs:文档(documentation)。
- style:格式(不影响代码运行的变动)。
- refactor:重构(即不是新增功能,也不是修改bug的代码变动)。
- perf:优化相关,比如提升性能、体验。
- test:增加测试。
- chore:构建过程或辅助工具的变动。
- revert:回滚到上一个版本。
- merge:代码合并。
- sync:同步主线或分支的Bug。
scope(可选)
scope用于说明 commit 影响的范围,比如电机控制层、通信层等等,视项目不同而不同。
例如在FishBot嵌入式中,可以是motors,uart等。如果你的修改影响了不止一个scope,你可以使用*代替。
subject(必选)
subject是commit目的的简短描述,不超过50个字符。
结尾不加句号或其他标点符号。
举个例子
小鱼给FishBot增加了oled支持
git commit -m "feat(13.13):完成运动学逆解"















 1044
1044











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









