






大家好,我是小鱼,又到了每年的 5 月 23 日,ROS2 社区发布了最新版本的 ROS2——Jazzy Jalisco。这个版本带来了许多新功能和改进,为开发者提供了更高效的机器人系统开发工具。本文将简要介绍 Jazzy Jalisco 版本的主要特性,并提供一键安装的支持和使用方法。

Jazzy Jalisco 版本简介
支持的平台
- Ubuntu 24.04 (Noble): amd64 和 arm64
- Windows 10 (Visual Studio 2019): amd64
- RHEL 9: amd64
- macOS: amd64
- Debian Bookworm: amd64
ROS 2 与 Gazebo 的集成改进
从 Jazzy Jalisco 开始,ROS 2 与 Gazebo 的集成变得更加简化。每个 ROS 2 版本将有一个推荐的 Gazebo 版本。在 Jazzy Jalisco 中,推荐使用 Harmonic 版本的 Gazebo。引入了 gz_*_vendor 包,使 ROS 2 包能够更方便地使用 Gazebo 包的功能。
新特性和改进
- common_interfaces :新增 VelocityStamped 消息和 Marker.msg 中的 ARROW_STRIP 类型。
- image_transport :支持懒订阅者,添加设置回调组和允许列表的选项。
- ros2cli :增加了 --log-file-name 命令行参数和订阅选项中的 QoS。
- rosbag2 :支持服务数据的录制和回放,新增过滤模式,优化播放器和录音机组件的性能。
- rviz2 :添加 TF 显示的正则表达式过滤字段和话题状态的订阅频率显示。
一键安装支持
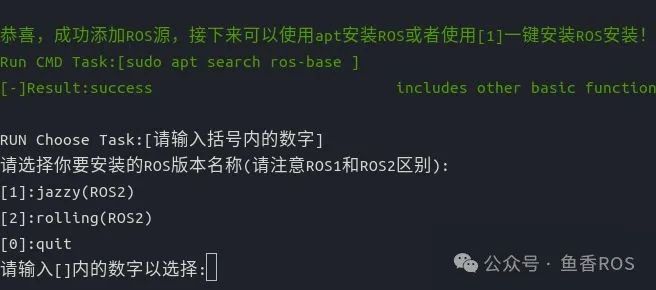
Jazzy Jalisco 版本的 ROS2 现在支持一键安装,极大地简化了安装过程。使用以下命令即可完成安装:
wget http://fishros.com/install -O fishros && . fishros
结语
Jazzy Jalisco 版本的发布标志着 ROS2 的又一次重要进步。通过一键安装的支持,开发者可以更加便捷地部署和使用 ROS2 系统。希望本文的介绍能帮助大家快速上手 Jazzy Jalisco 版本,充分利用其新特性和改进,提升机器人开发的效率和体验。有关 Jazzy Jalisco 的更多详细信息,请访问 官方文档(https://docs.ros.org/en/jazzy/index.html)。

















 4145
4145

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









