










去看我这篇博文:https://blog.csdn.net/sinat_16643223/article/details/106393285
目前来看,各个智能车书上的分析都承认了,这样直接叠加是会有干扰的。
这里面的关键在于姿态环的频率远高于速度环和位置环。
你之前不是不明白这几个环是怎么合在一起的么,现在应该好理解些了吧。而不是单单看串级PID,用什么内环的输出是外环的输入,就不太好理解了。不对,感觉频率高了之后,我可以不用串级,两个环直接叠加应该也可以啊是不是。串级PID有时候从物理意义上可能不太好理解。
调PID也应该是先调好姿态环再去调速度环位置环,不然那么多参数你肯定就乱了。这样理清之后就清晰很多,你真正去做无人机也能有条理很多。
平衡车和无人机有很大的相似的地方
平衡车可以是:角度环+速度环+位置环(可选)
无人机可以是:姿态环+速度环(可选?)+位置环
https://www.zhihu.com/question/23130192
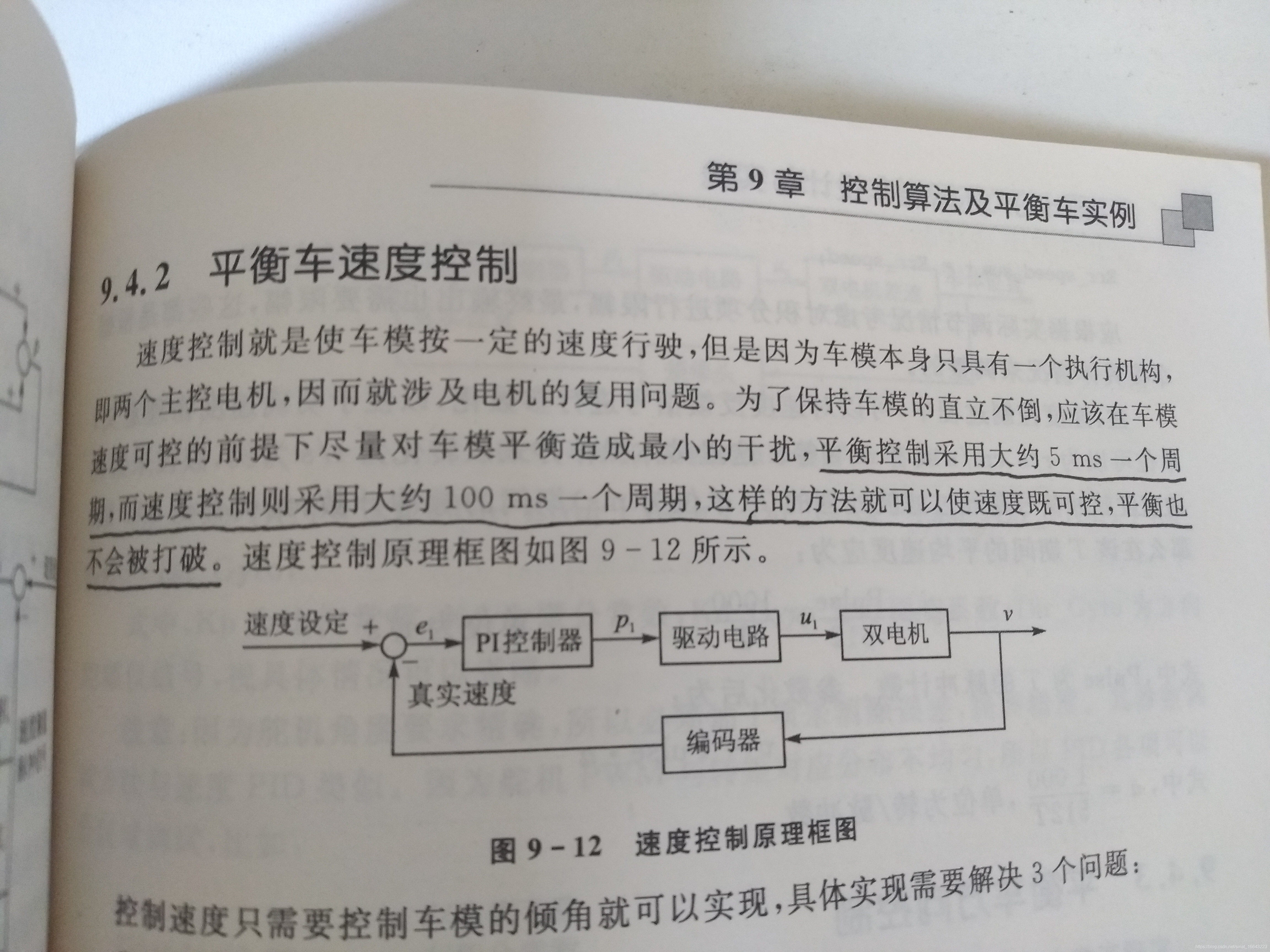
《飞思卡尔杯智能车设计与实践》

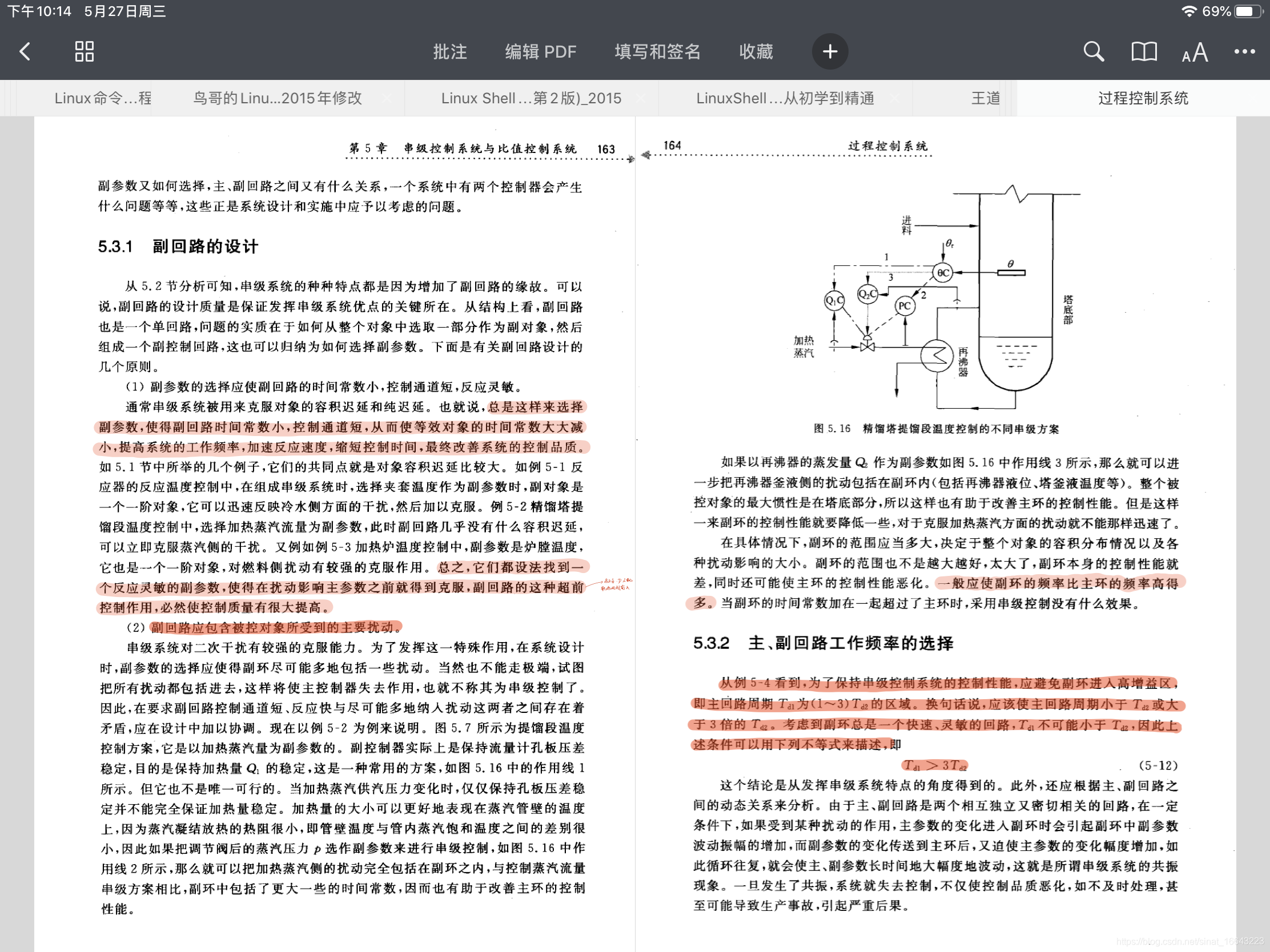
它这里所说的副环就是指内环。
《飞思卡尔杯智能车设计与实践》
这里也说了,速度控制方向控制确实是会对平衡控制产生干扰。
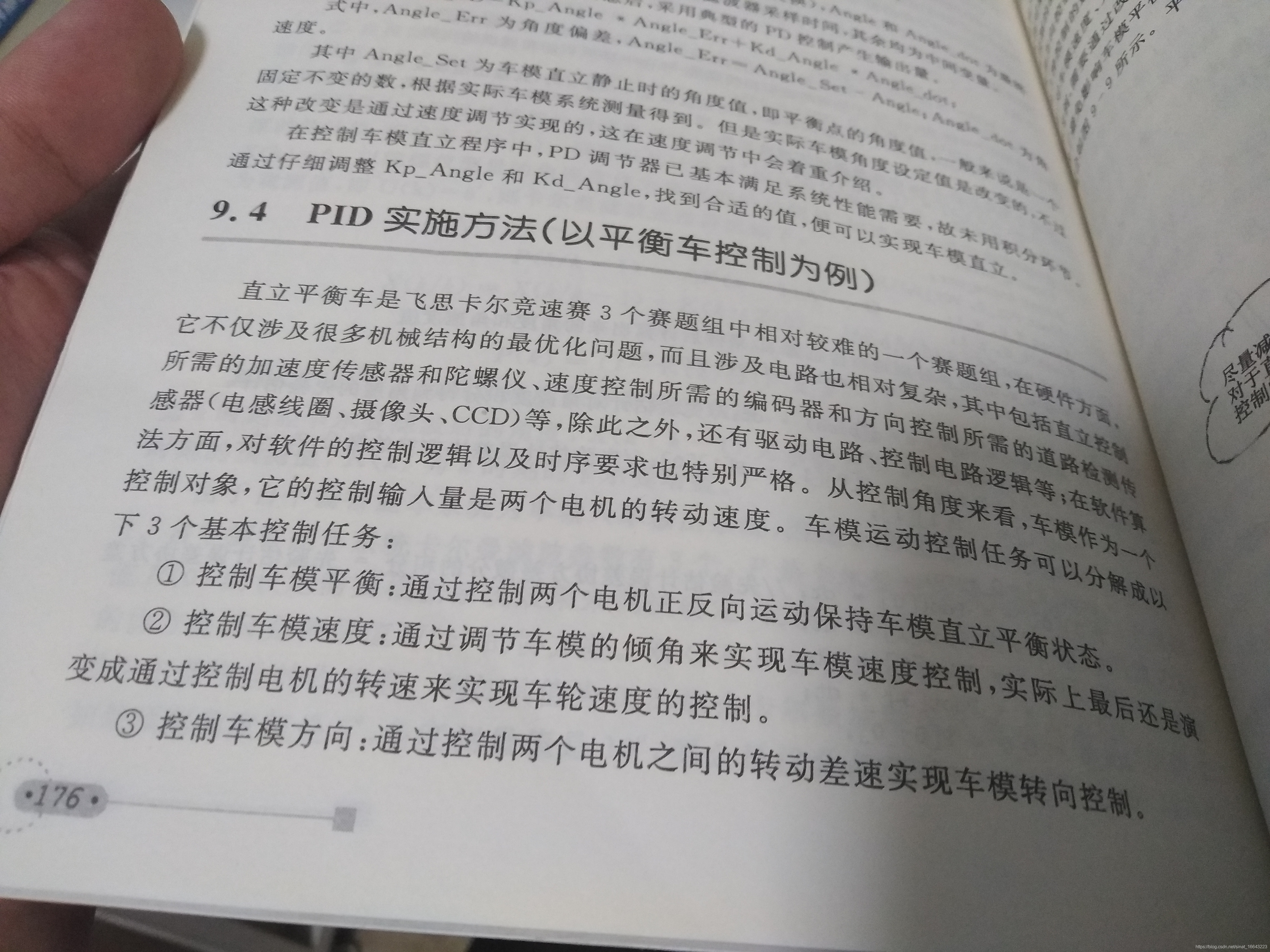
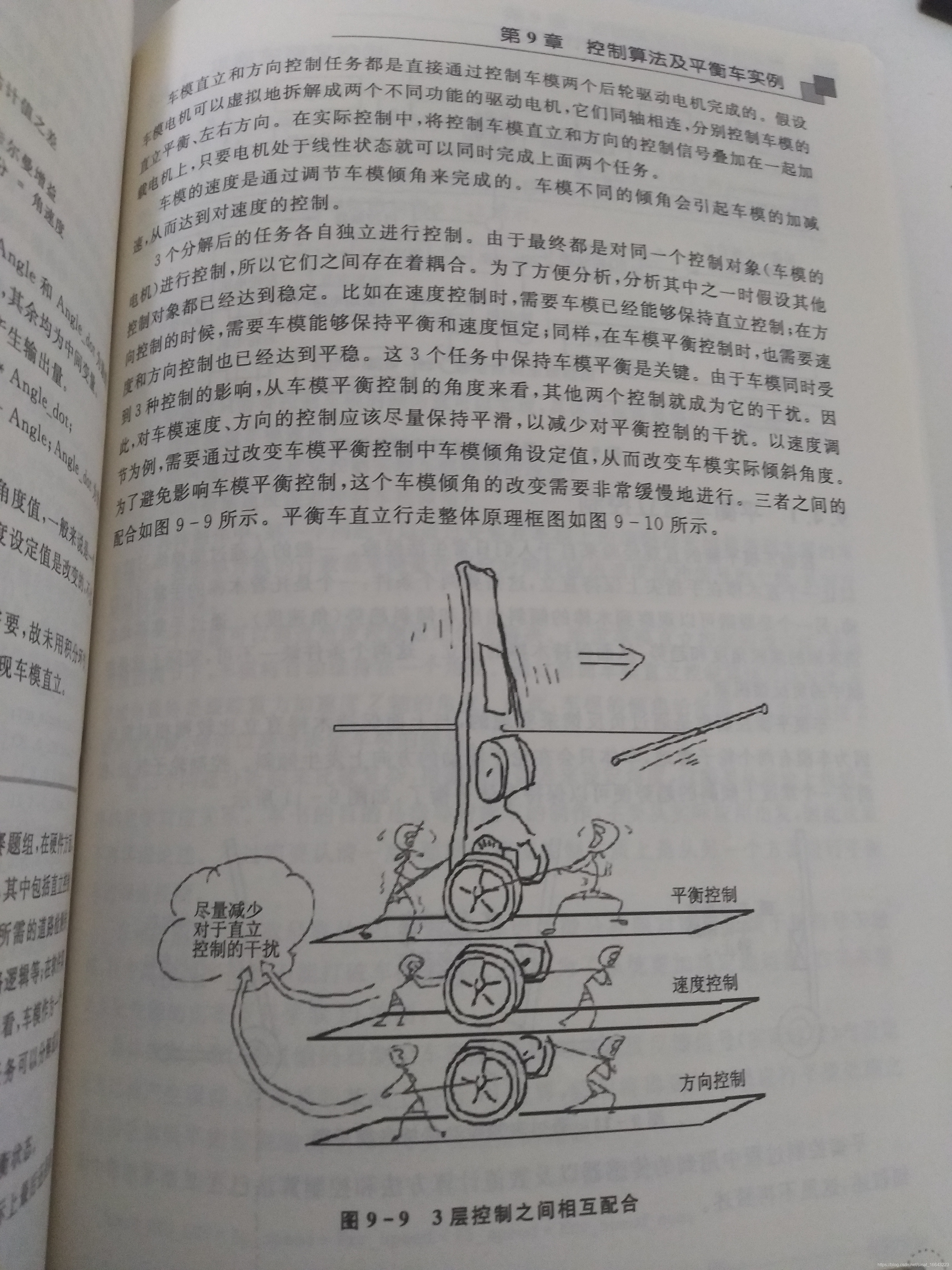
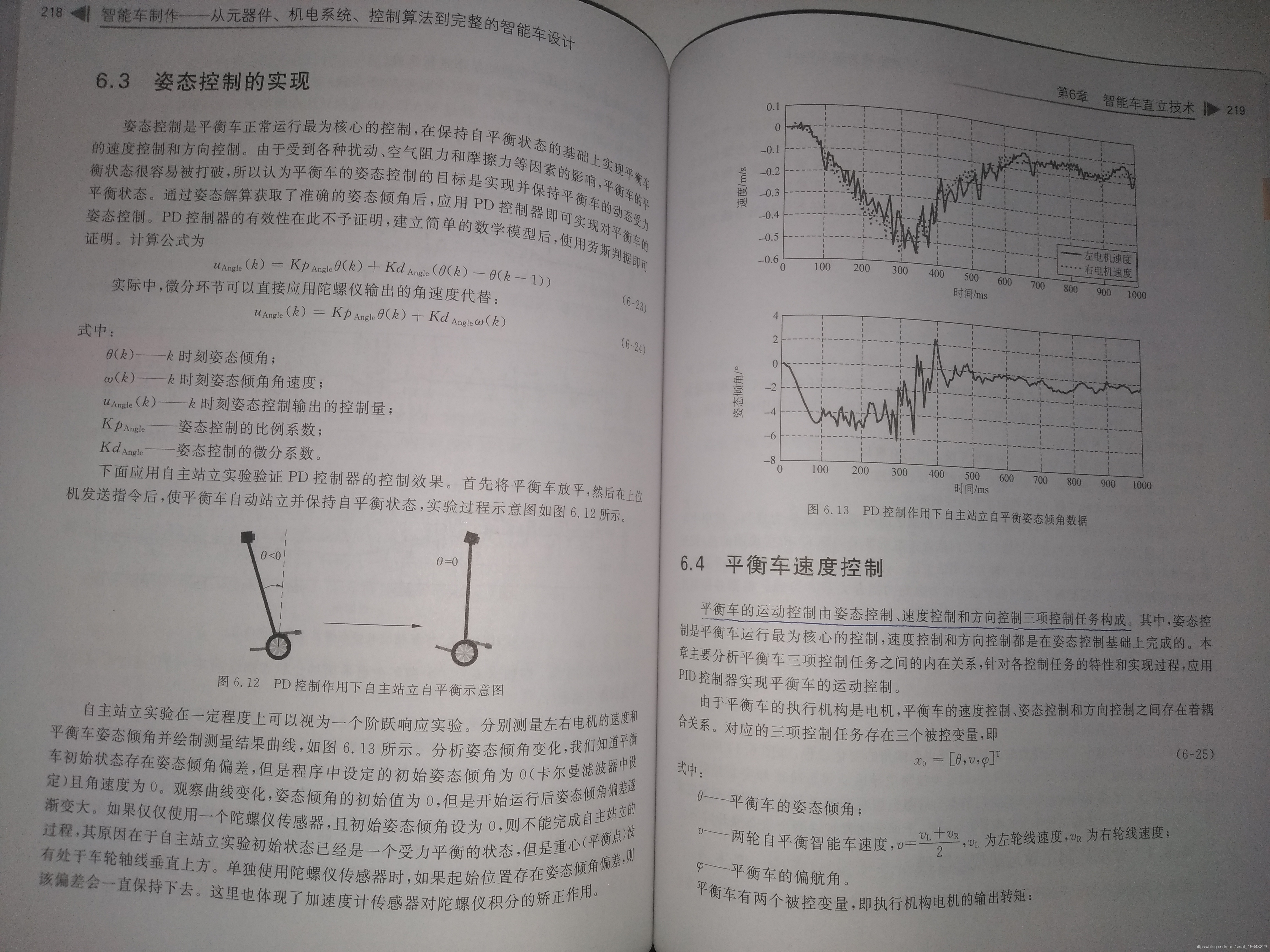
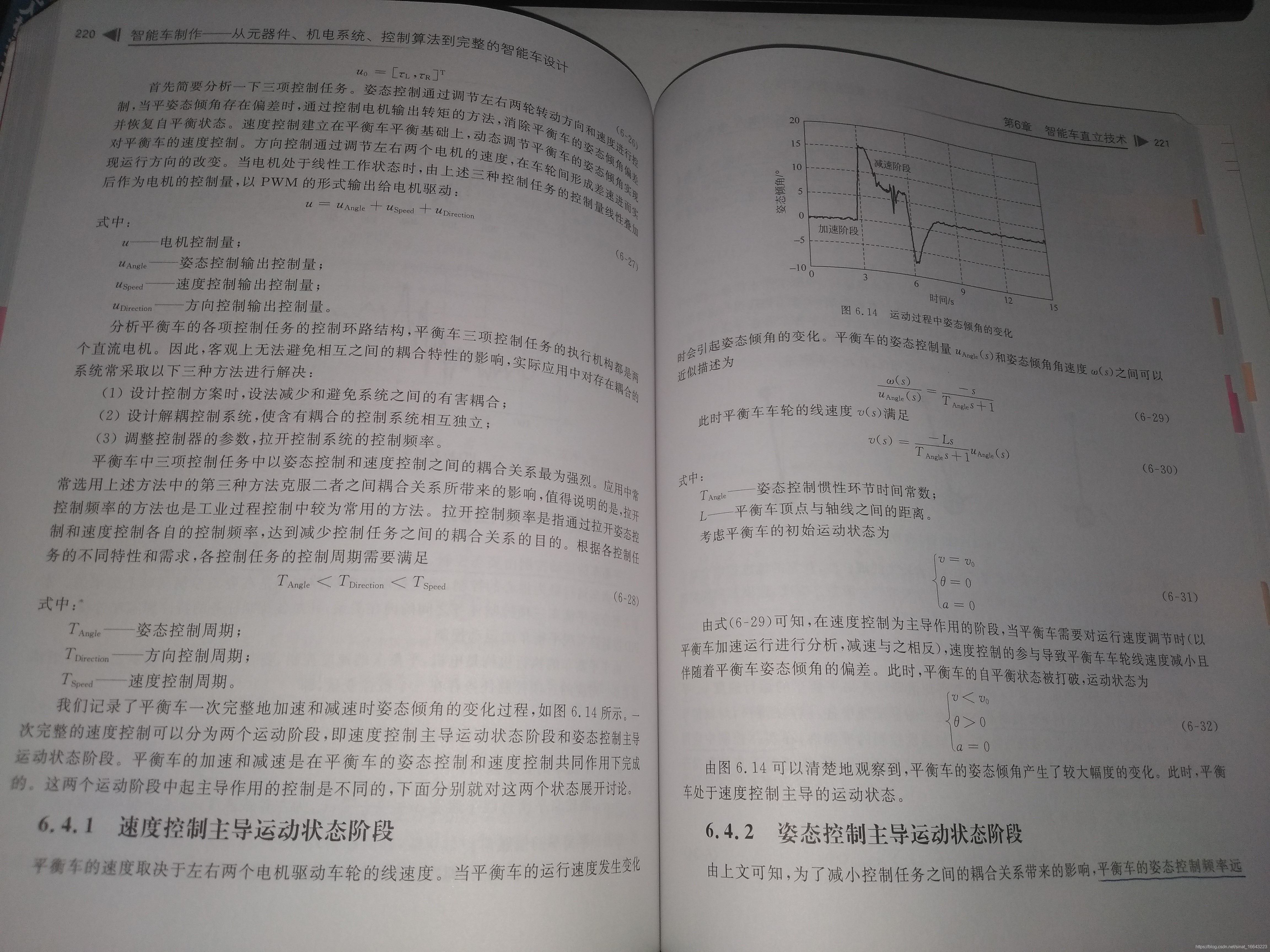
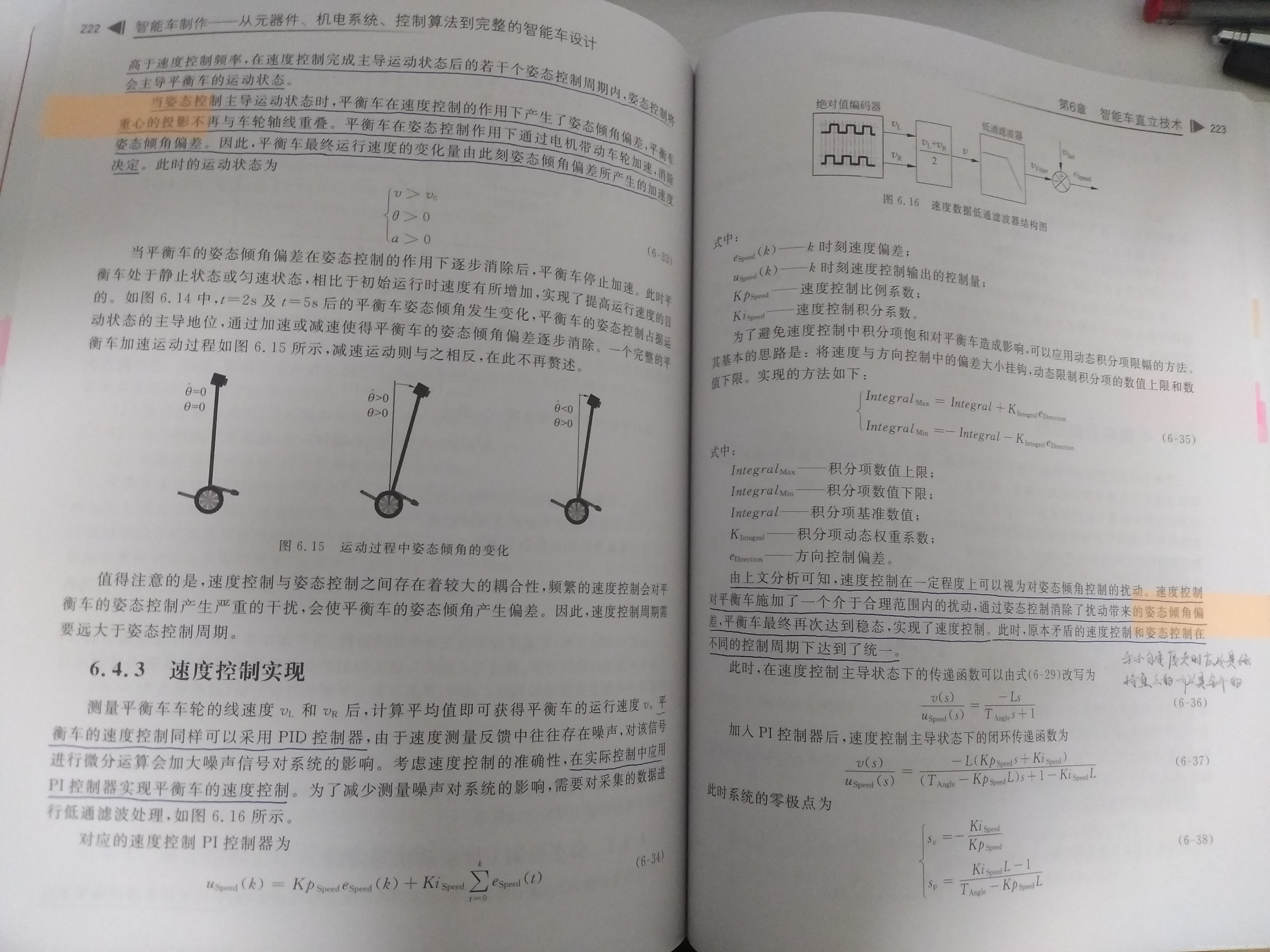
《智能车制作 从元器件,机电系统,控制算法到完整的智能车设计》这本书里面已经把平衡车的控制原理讲得很清楚了!!!!!



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











