







【【3D视觉工坊】第八期公开课:立体视觉之立体匹配理论与实战-哔哩哔哩】 https://b23.tv/kESlk29


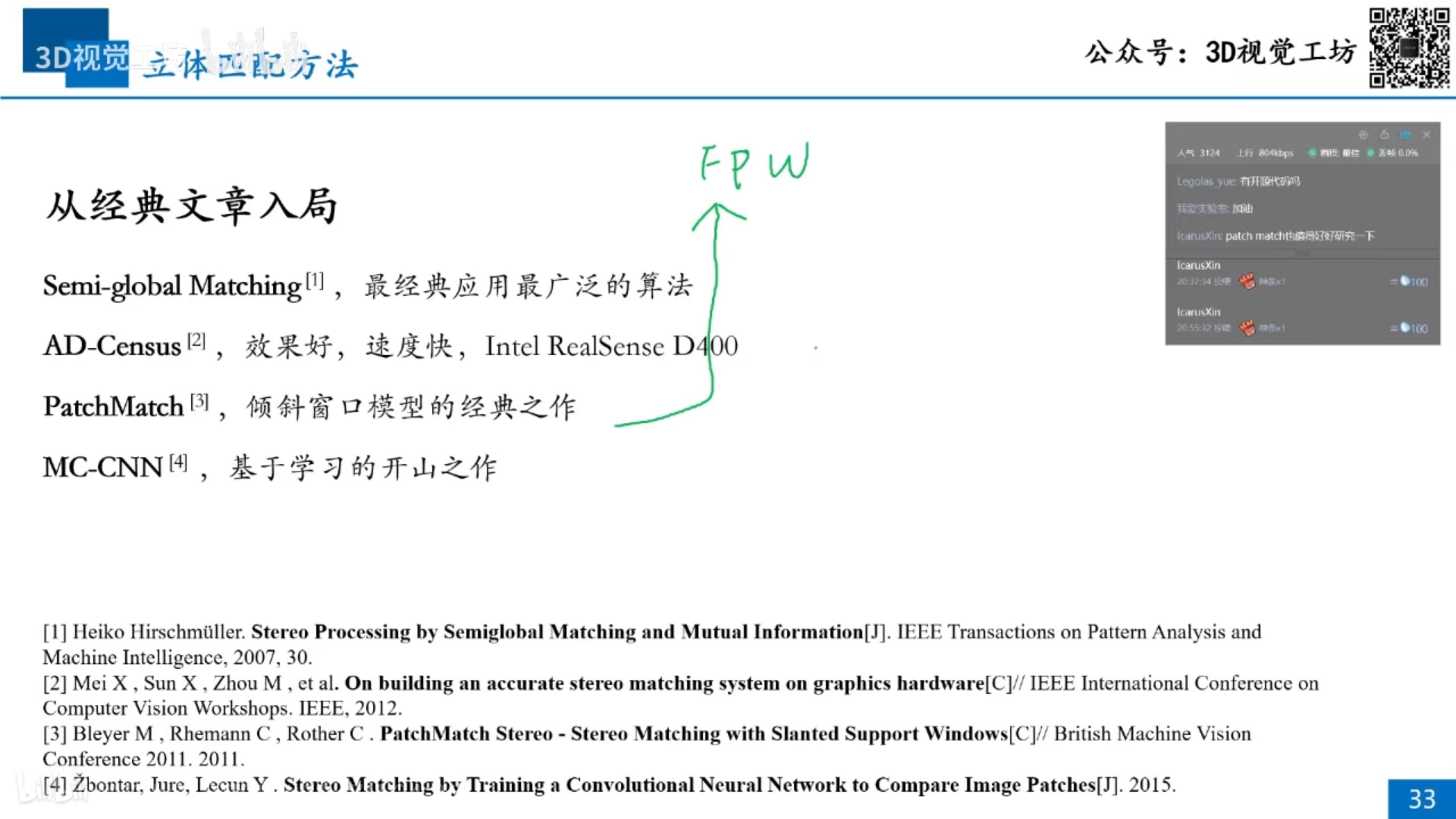
他在github开源了两个经典的算法,SGM和patchmatchstereo

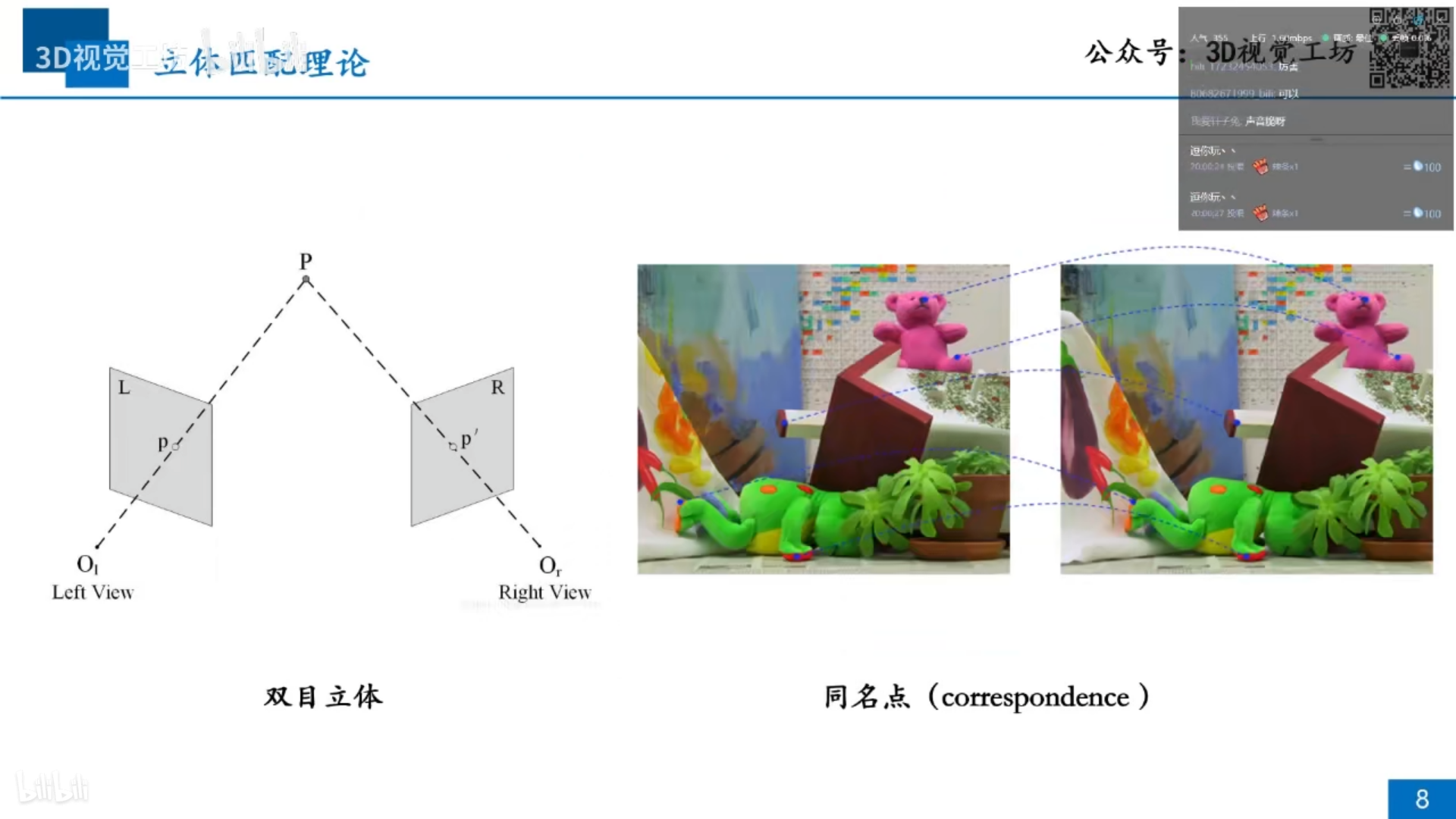
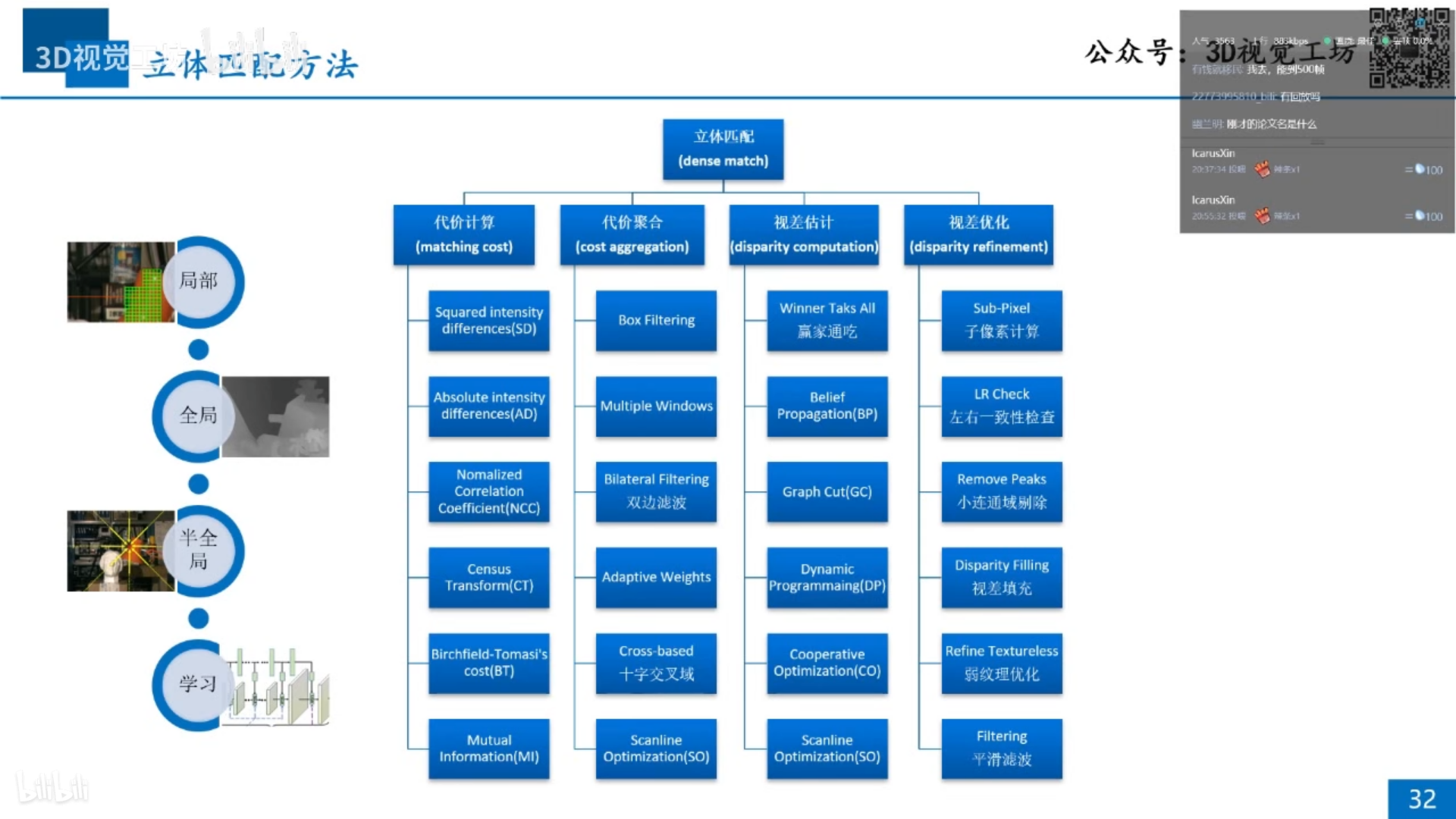
立体匹配也解决的问题是,在图像中寻找那些同名点对。根据同名点数量的多少,我们可以分为稀疏分为稀疏的立体匹配和稠密的立体匹配。稀疏的立体匹配它是寻找有限个同名点,稠密立体匹配它是尽可能把图像中所有像素的同名点对都要寻找出来。我们今天的报告主要是针对稠密点立体匹配。
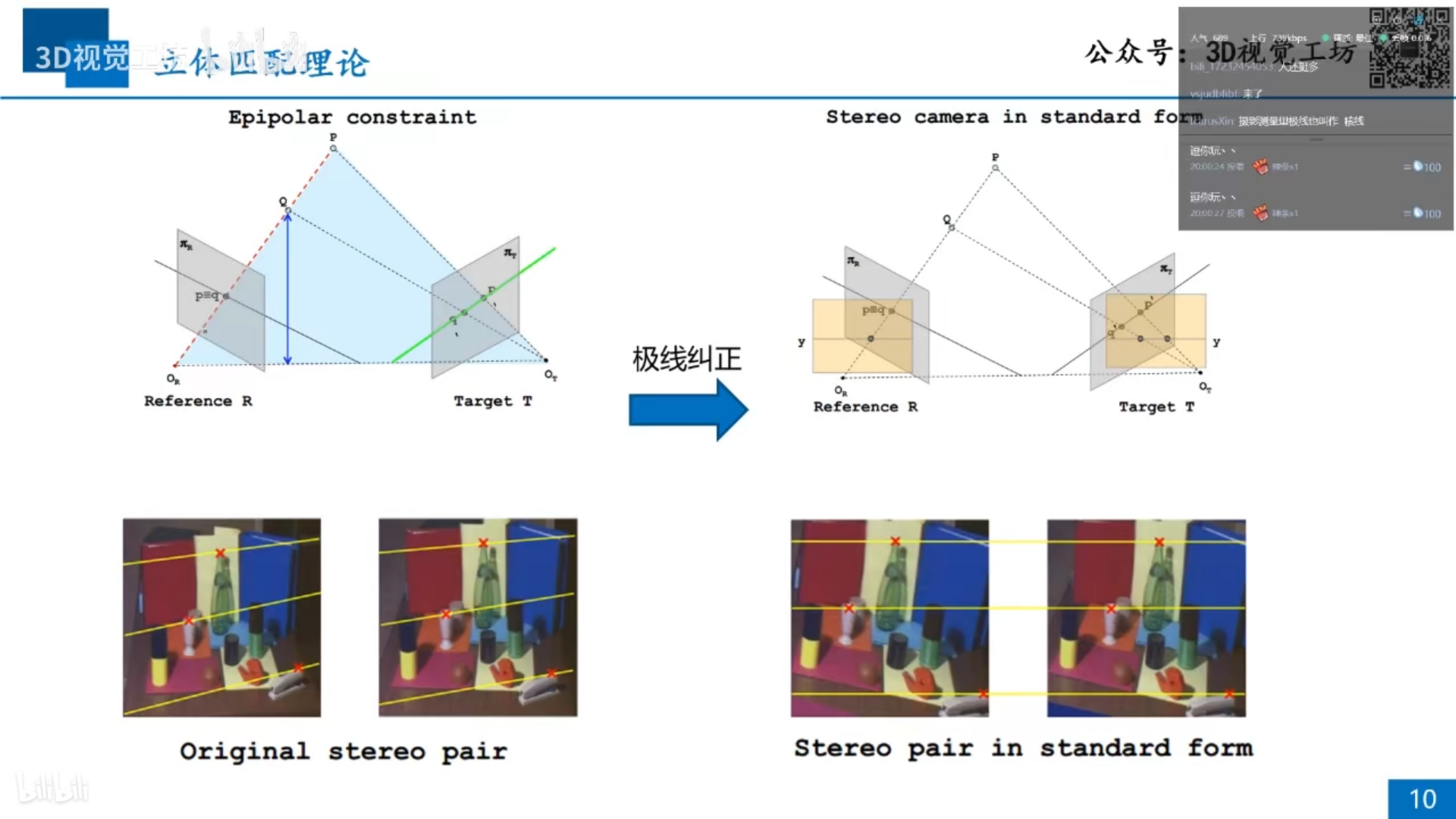
摄影测量里面极线又叫核线
极线纠正后,极线和图像的行平行了,而且对应的级线对,它的行坐标y值是相等的。
极线纠正其实就是吧图像做个旋转
可以方便我们进行算法设计,让算法的实现复杂度进一步降低。
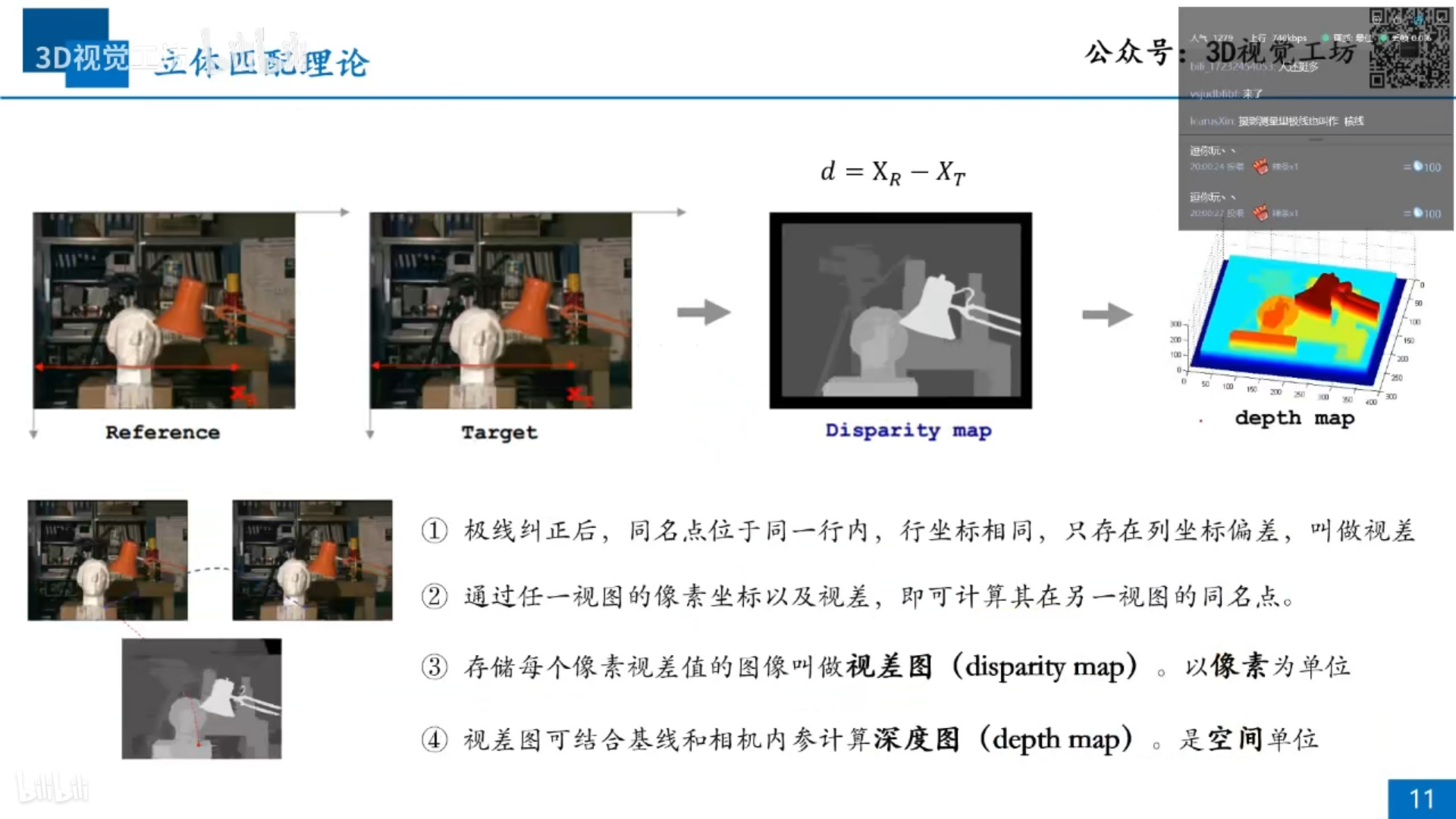
极线纠正后,同名点行坐标相同,只存在列坐标的偏差,这个偏差就叫视差。(这个感觉很美)
广义的视差是有行视差和列视差的,但是极线纠正之后,行坐标相同,只有列坐标的视差,所以立体匹配里面说到视差单指列坐标的偏差。
视差是用左视图减去右视图,虽然右视图减左视图没什么问题,但是大家都是这么用的。
深度公式2是深度公式1的特殊形式
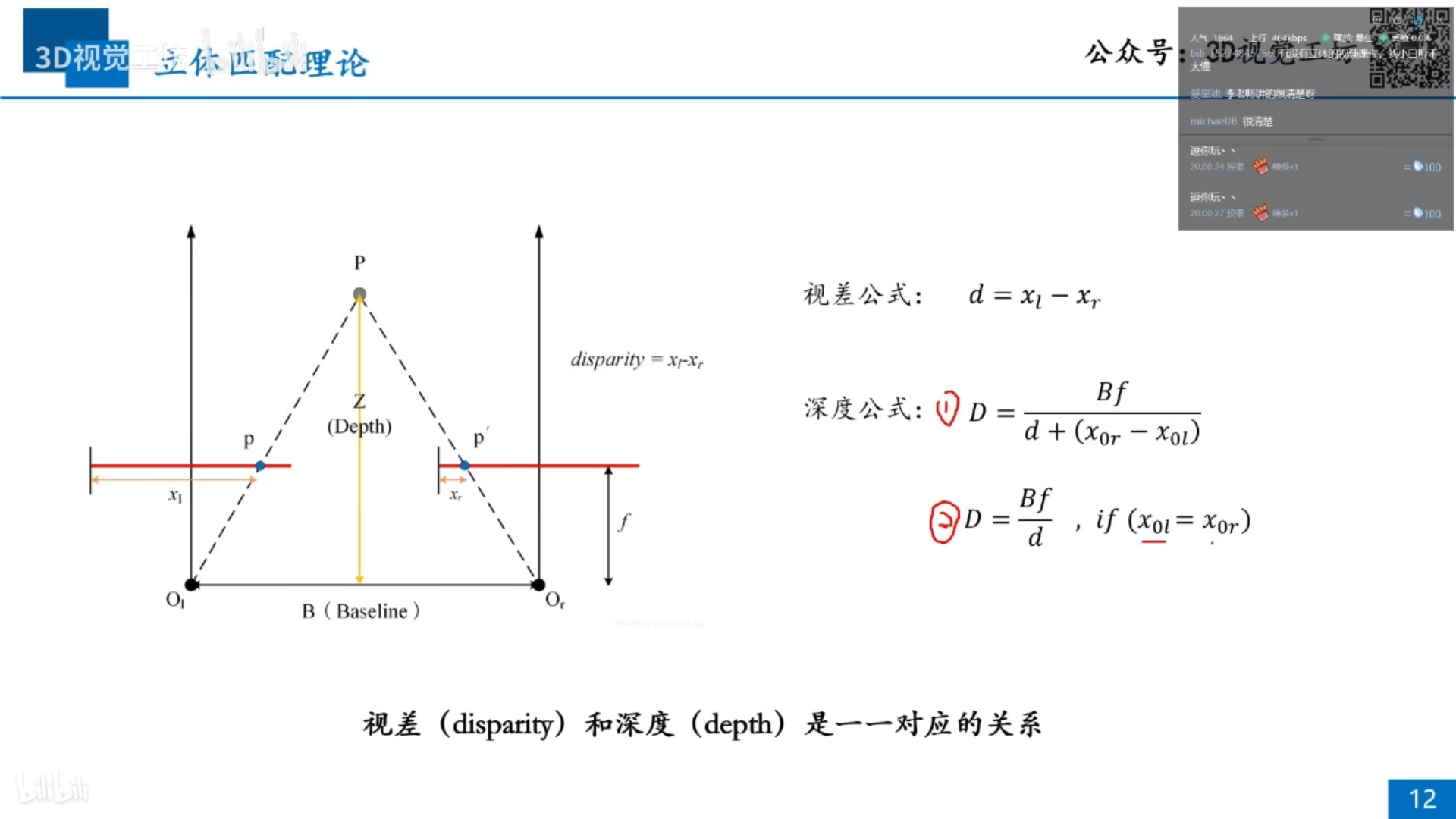
对深度公式进行了推导,推导不难,利用相似三角形原理。
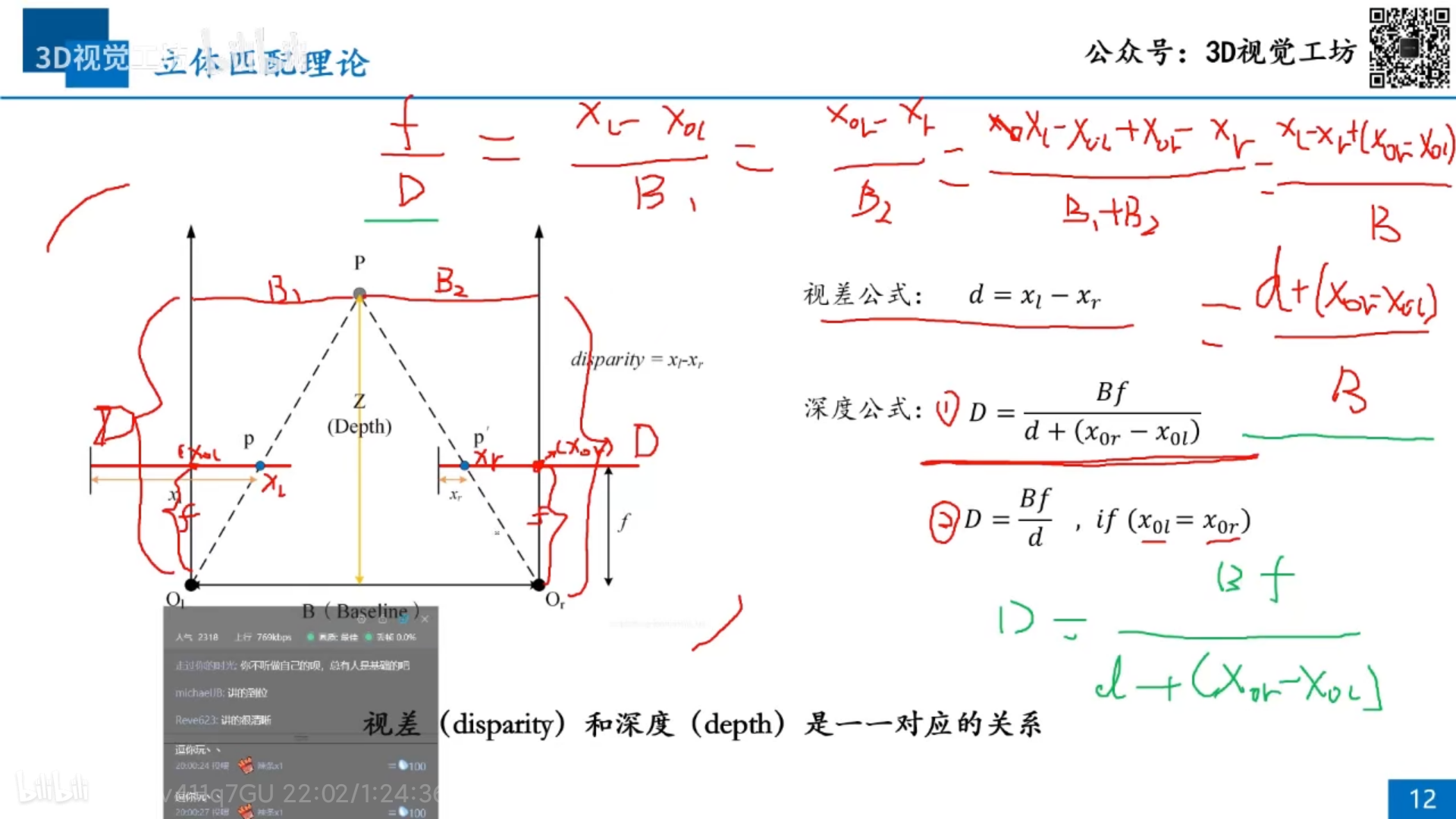
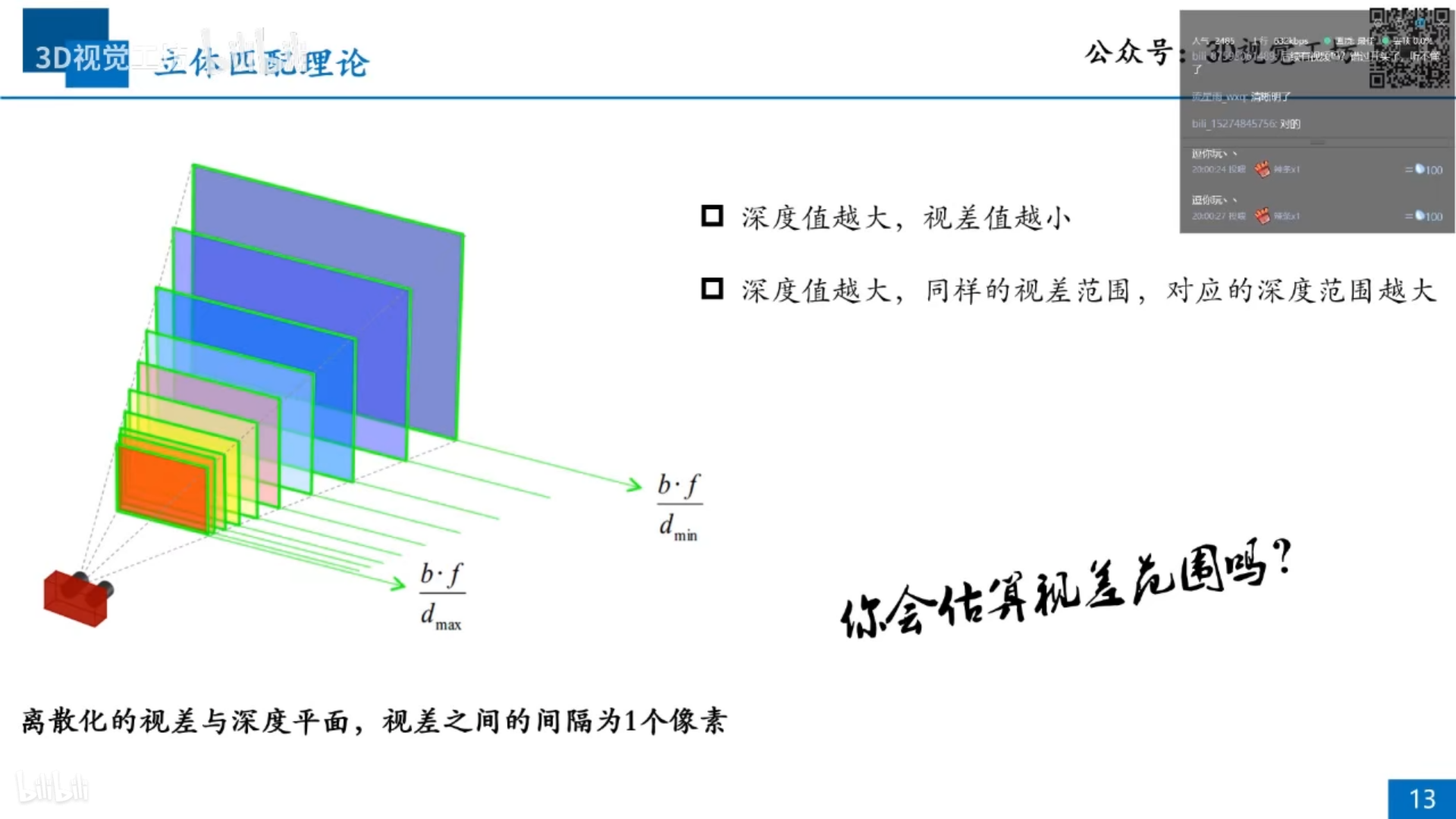
视差是离散的整数,换算出的深度也是离散的,同样是间隔一个视差,离这个相机越远,这个深度间隔就越来越大了。深度越大的时候,同样一个像素对应的深度范围越来越大。如果我的算法精度是一个像素,我稍微偏了一个像素,离相机越远,深度就会偏得越远,同样一个算法,离相机越远,空间精度就会越差。
时间关系,我们这一次的重点还是在实战上面。所以理论就不说太多了。




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











