











第一作者:李欣岩, Zhuohui Liu, Ang Gao
通讯作者:张庆华, 葛琛, 谷林
通讯单位:中国科学院物理研究所,清华大学等
论文速览:
本研究通过原位可视化技术,揭示了ZrO2纳米晶体中铁电-铁弹性耦合作用下,正交相到类单斜相变的可逆性。
研究发现,90°的铁电-铁弹性开关可以保护从正交相到压缩应变的类单斜相(M')的可逆剪切变形路径。然而,随着M'状态逐渐累积局部应变,临界的拉伸应变可以使铁弹性域固定,导致不可逆的M'-M应变松弛和铁电性的丧失。
这些发现展示了铁弹性开关在相变可逆性中的关键作用,并为稳定氟氧化物薄膜中亚稳态铁电相提供了拉伸应变阈值。
图文导读:
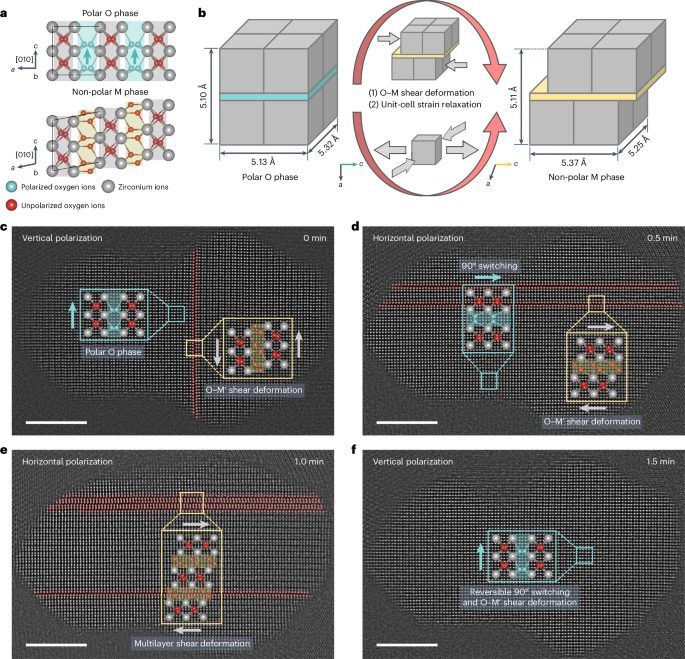
图1:展示了ZrO2纳米晶体中90°铁电-铁弹性开关和O-M'马氏体相变的可逆性。图像显示了从0到1.5分钟的时间内,O相ZrO2纳米晶体的结构演变。
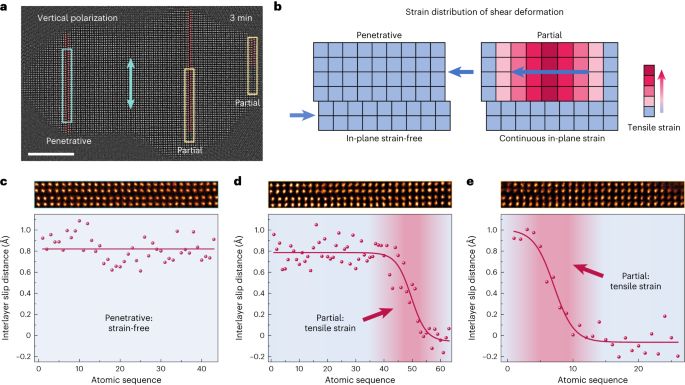
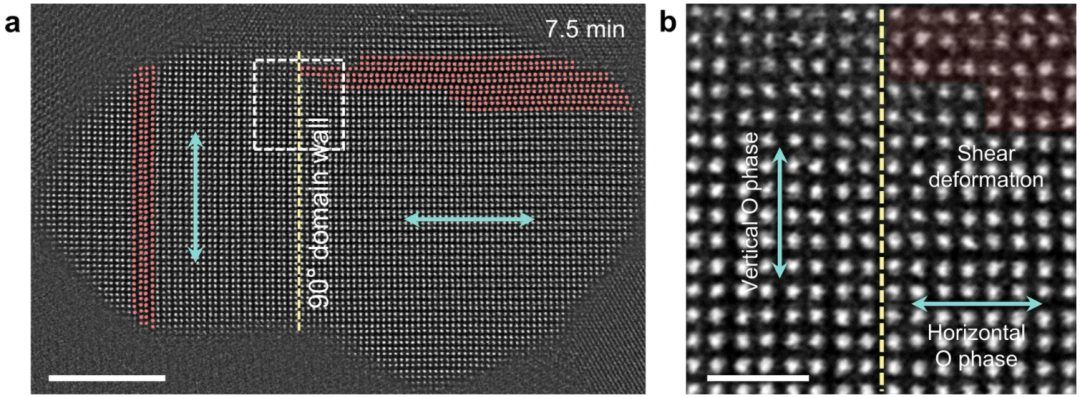
图2:描述了剪切变形区域中的应变分布情况。图示了两种剪切变形结构的类型,以及它们在O-M'马氏体相变中的应变分布差异。
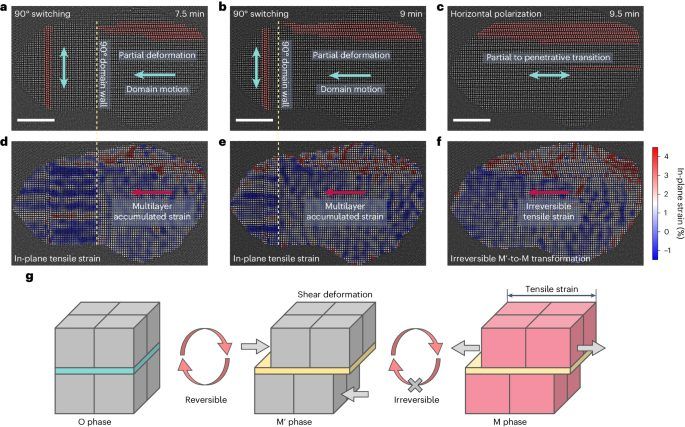
图3:展示了从7.5到9分钟的90°铁电-铁弹性开关过程中,不可逆的M'-M马氏体相变。图像揭示了在开关过程中,局部拉伸应变的累积和铁弹性域的固定。

图4:对比了可逆的O-M'和不可逆的M'-M马氏体相变中的应变情况。图像显示了在不同时间点下,O和M'相以及O和M相的共存状态和应变分布。
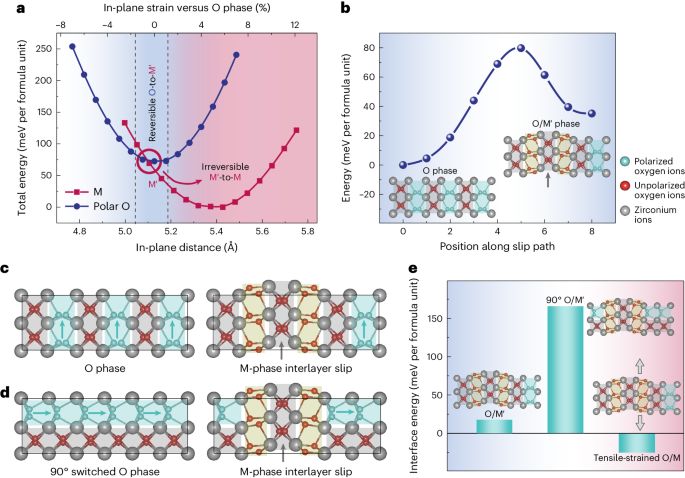
图5:根据第一性原理计算,探讨了应变对O-M马氏体相变和铁弹性开关的影响。图中展示了M和极性O相在单轴应变下的总能量变化,以及M相滑移在O相中的能量障碍。
亮点介绍:
1. 原子尺度的原位可视化:通过高角环形暗场扫描透射电子显微镜(HAADF-STEM)技术,直接观察到了ZrO2纳米晶体中的O-M'马氏体相变过程。
2. 铁电-铁弹性耦合机制:研究发现90°铁电-铁弹性开关对于保护O相到M'相的可逆剪切变形路径至关重要。
3. 应变阈值的确定:*研究提供了稳定氟氧化物薄膜中亚稳态铁电相的拉伸应变阈值,为材料设计提供了重要参考。
4. 不可逆相变的机制揭示:*揭示了局部拉伸应变如何导致铁弹性域固定和铁电性的丧失,为理解和控制铁电材料的稳定性提供了新的视角。
5. 理论和实验的结合:通过第一性原理计算与实验结果的结合,深入理解了氟氧化物中极性-非极性相变的动力学过程。
高端表征:
1. 原位透射电镜技术:作者使用了高角环形暗场扫描透射电子显微镜进行原位结构演变的捕捉。这种技术能够在原子尺度上直接观察到ZrO2纳米晶体中铁电-铁弹性耦合下的相变过程。
通过原位TEM实验,作者能够实时监测ZrO2纳米晶体在电子束辐照下的相变过程,包括从正交相到类单斜相的转变以及铁电-铁弹性开关的动态过程。
2. 电子能量损失谱:在进行HAADF-STEM成像的同时,作者还收集了EELS数据,以获取样品的化学和电子结构信息。
EELS数据的收集采用了双EELS模式,能够同时获得零损失光谱和核心损失光谱,为分析样品的局部化学环境和元素分布提供了重要信息。
计算模拟:
在本论文中,作者采用了第一性原理计算来深入理解ZrO2纳米晶体中相变过程的热力学和动力学特性。
作者使用了基于密度泛函理论(Density Functional Theory, DFT)的VASP软件进行计算模拟。通过 PBE泛函和广义梯度近似(GGA)的形式来处理交换相关能。
计算了极性O相和非极性M相在c轴单轴应变下的总能量,并分析了两相之间的能量差异。利用NEB)方法计算了M相滑移在O相中的能量障碍,以及O/M'相界面的能量。
通过计算模拟,作者揭示了O相和M'相之间的热力学相似性,以及90°铁弹性开关为可逆O–M'相变提供的动力学途径。
文献信息:
标题:Ferroelastically protected reversible orthorhombic to monoclinic-like phase transition in ZrO2 nanocrystals
期刊:Nature Material

















 1166
1166

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









