









 第一作者:Chengcheng Han
第一作者:Chengcheng Han
通讯作者:王中林、吴治峄
通讯单位:中科院北京纳米能源所,中国科学院大学
论文速览
随着机器触觉领域的发展,实现多维力感测变得越来越重要。本研究提出了一种3D柔性力传感器,该传感器由轴对称的半球形凸起和四个等大的四分之一圆电极组成。
通过模拟,发现当剪切力的大小保持不变且其方向在0−360°内变化时,可以通过四个电极之间的电压关系来表达力的大小和方向。实验结果显示,在0−90°范围内,该传感器能够达到15°的分辨率。
此外,我们将传感器安装在机器手上,使其能够感知触摸和抓取动作的力的大小和方向。基于此,设计的3D柔性触觉力传感器为多维力检测和应用提供了宝贵的见解。
图文导读
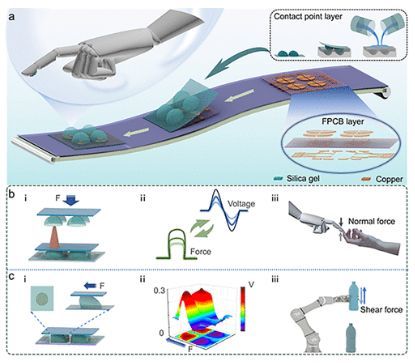
图1:3D柔性触觉传感器的制备与响应。
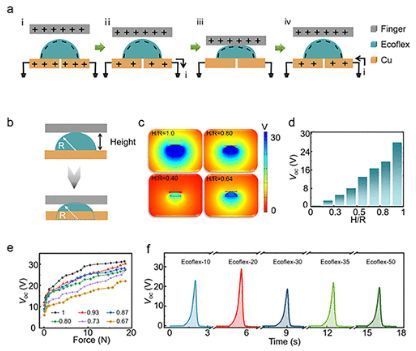
图2:触觉传感器的工作机理与模拟。
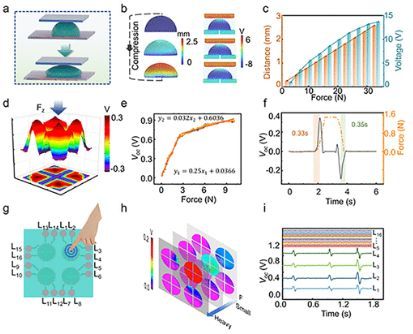
图3:响应与恢复时间及实时数据图。

图4:剪切力检测与分析。
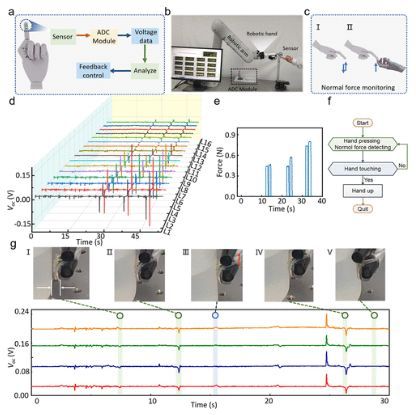
图5:机器手控制系统与触觉传感器反馈。
总结展望
本研究提出的基于单电极模式的三维柔性触觉传感器,通过模拟和实验验证了其在检测正压力和剪切力方面的性能。该传感器在0−10 N的正压力范围内显示出两个线性响应范围,并且在剪切力大小恒定时,通过四个电极之间的电压关系能够表示剪切力的大小和方向,剪切力检测的分辨率达到15°。
此外,将传感器集成到机器手表面,实现了对力的方向和强度的感知,展示了在人机交互应用中的潜力。该研究的亮点在于其高灵敏度、高分辨率以及在实际应用中的稳定性和可靠性,为未来机器人触觉传感技术的发展提供了新的方向。
文献信息
标题:Flexible Tactile Sensors for 3D Force Detection 期刊:Nano Letters


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









