










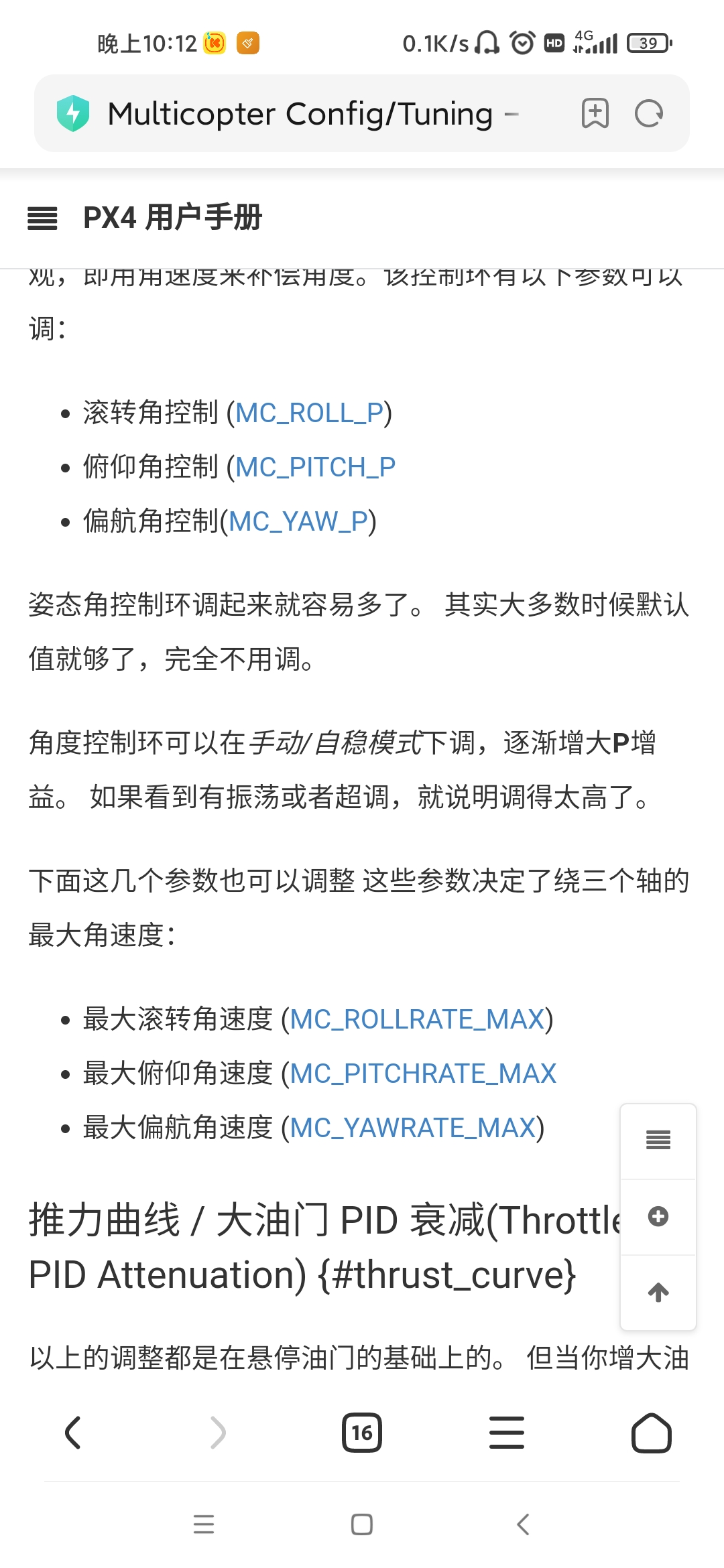
看到可以设置最大偏航角速度
https://www.bookstack.cn/read/px4-user-guide/zh-config_mc-pid_tuning_guide_multicopter.md
可以看到单位是角度,不是弧度,默认值是最大200度每秒。
https://www.bookstack.cn/read/px4-user-guide/zh-advanced_config-parameter_reference.md#MC_YAWRATE_MAX

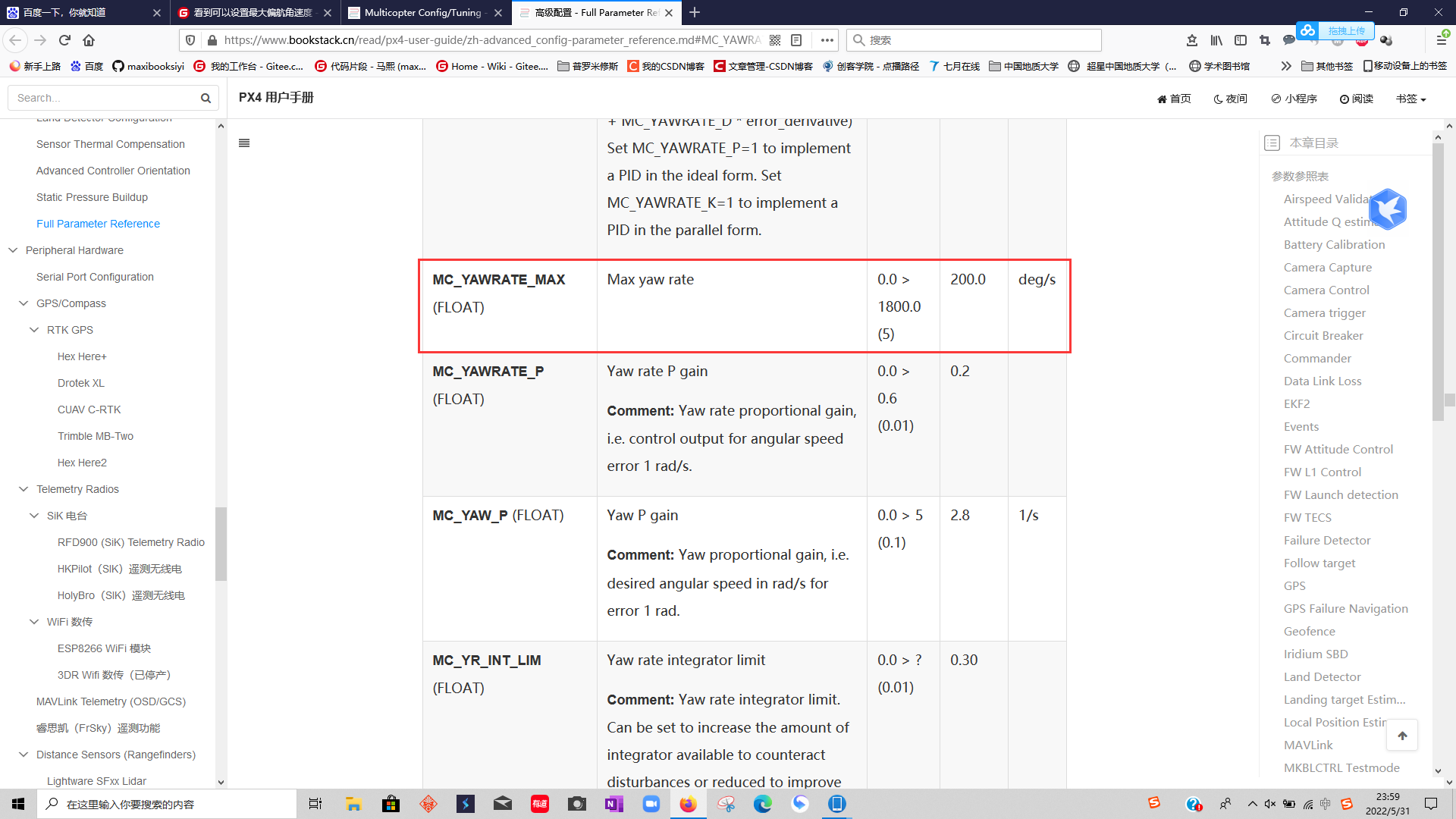
话说这个能限制offboard下的偏航角速度么?感觉可能不是,开头是MC不是MPC...














 3596
3596











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









