









不管是vins-fusion还是ORBSLAM3,如果接收到的是rgb图像,也是先转为灰度图再进行处理的
ORBSLAM3是会把图像转为灰度图去处理的
https://www.cnblogs.com/yiqian/p/14899026.html
cvtColor(mImGray,mImGray,cv::COLOR_RGB2GRAY);
/ORB_SLAM3/src/Tracking.cc
cv::Mat Tracking::GrabImageMonocular(const cv::Mat &im, const double ×tamp, string filename)
{
mImGray = im;
if(mImGray.channels()==3)
{
if(mbRGB)
cvtColor(mImGray,mImGray,cv::COLOR_RGB2GRAY);
else
cvtColor(mImGray,mImGray,cv::COLOR_BGR2GRAY);
}
else if(mImGray.channels()==4)
{
if(mbRGB)
cvtColor(mImGray,mImGray,cv::COLOR_RGBA2GRAY);
else
cvtColor(mImGray,mImGray,cv::COLOR_BGRA2GRAY);
}
if (mSensor == System::MONOCULAR)
{
if(mState==NOT_INITIALIZED || mState==NO_IMAGES_YET ||(lastID - initID) < mMaxFrames)
mCurrentFrame = Frame(mImGray,timestamp,mpIniORBextractor,mpORBVocabulary,mpCamera,mDistCoef,mbf,mThDepth);
else
mCurrentFrame = Frame(mImGray,timestamp,mpORBextractorLeft,mpORBVocabulary,mpCamera,mDistCoef,mbf,mThDepth);
}
else if(mSensor == System::IMU_MONOCULAR)
{
if(mState==NOT_INITIALIZED || mState==NO_IMAGES_YET)
{
mCurrentFrame = Frame(mImGray,timestamp,mpIniORBextractor,mpORBVocabulary,mpCamera,mDistCoef,mbf,mThDepth,&mLastFrame,*mpImuCalib);
}
else
mCurrentFrame = Frame(mImGray,timestamp,mpORBextractorLeft,mpORBVocabulary,mpCamera,mDistCoef,mbf,mThDepth,&mLastFrame,*mpImuCalib);
}
if (mState==NO_IMAGES_YET)
t0=timestamp;
mCurrentFrame.mNameFile = filename;
mCurrentFrame.mnDataset = mnNumDataset;
#ifdef REGISTER_TIMES
vdORBExtract_ms.push_back(mCurrentFrame.mTimeORB_Ext);
#endif
lastID = mCurrentFrame.mnId;
Track();
return mCurrentFrame.mTcw.clone();
}
vins-fusion如果收到rgb图也是转为灰度图再处理的
vins_estimator/src/rosNodeTest.cpp · 马熙/VINS-Fusion - Gitee.com
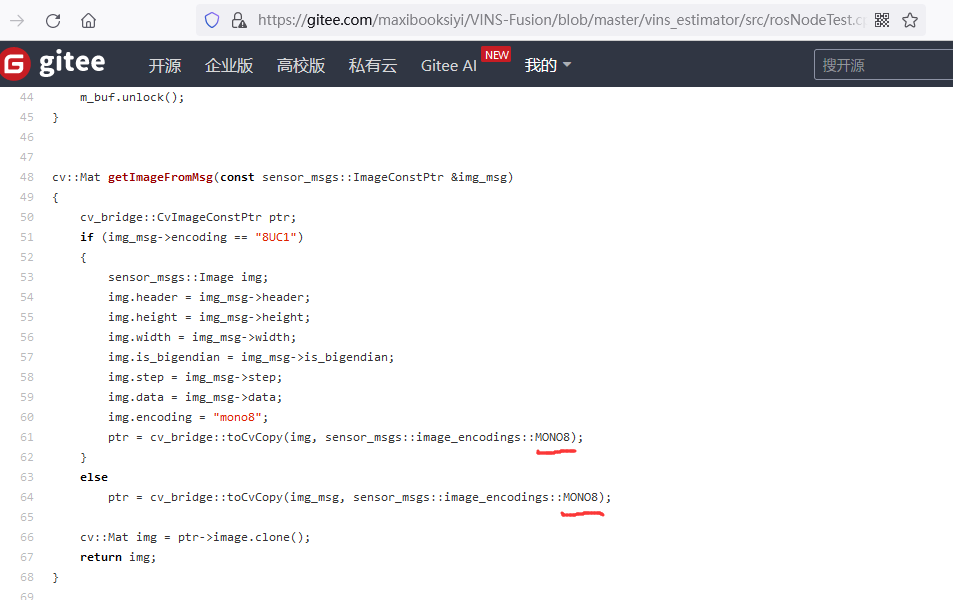
cv::Mat getImageFromMsg(const sensor_msgs::ImageConstPtr &img_msg)
{
cv_bridge::CvImageConstPtr ptr;
if (img_msg->encoding == "8UC1")
{
sensor_msgs::Image img;
img.header = img_msg->header;
img.height = img_msg->height;
img.width = img_msg->width;
img.is_bigendian = img_msg->is_bigendian;
img.step = img_msg->step;
img.data = img_msg->data;
img.encoding = "mono8";
ptr = cv_bridge::toCvCopy(img, sensor_msgs::image_encodings::MONO8);
}
else
ptr = cv_bridge::toCvCopy(img_msg, sensor_msgs::image_encodings::MONO8);
cv::Mat img = ptr->image.clone();
return img;
}
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









