









第一作者:Shixuan Zhao, Bin Liu, Kailang Li
通讯作者:巩金龙、王拓
通讯单位:天津大学
成果速览
本研究开发了一种新型的硅光电极,该电极表面覆盖有TiO2/不锈钢双层结构,用于太阳能驱动的海水分解。通过在不锈钢和TiO2的协同作用下,实现了高效的氧气进化反应和对海水中腐蚀性离子的阻隔。
实验结果显示,该光电极在含有氯离子的碱性电解液中稳定性达到167小时,并且在碱性自然海水中表现出超过50小时的稳定性能,光子转换效率为2.62%。
图文导读
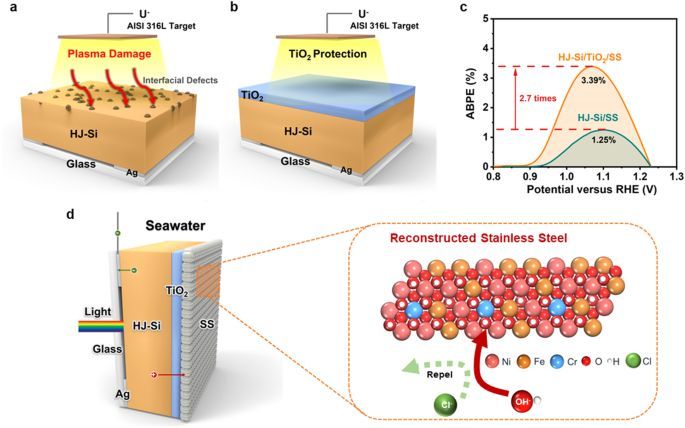
图1:展示了硅光电极的制备过程和结构示意图。通过在异质结硅基底上沉积TiO2和不锈钢薄膜,构建了双层保护层。图中还展示了在模拟AM 1.5 G光照下,HJ-Si/TiO2/SS光电极的光电转换效率(ABPE)曲线。
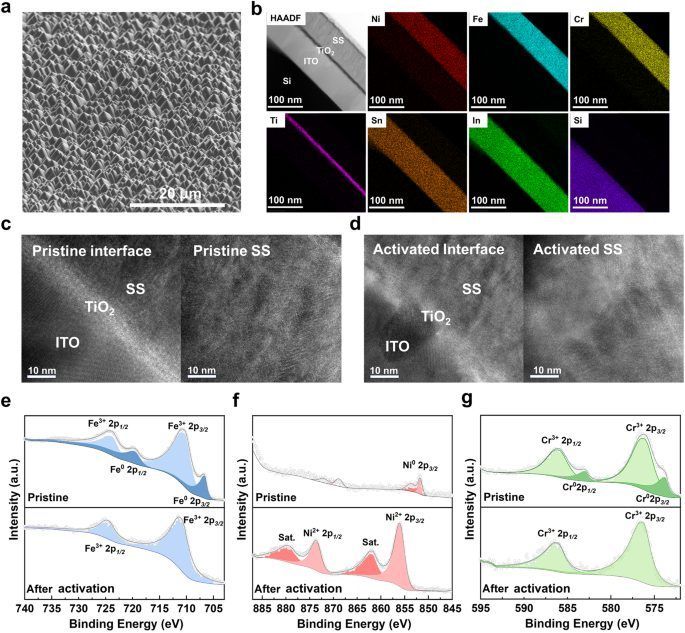
图2:通过扫描电子显微镜(SEM)和透射电子显微镜(TEM)图像,展示了HJ-Si/TiO2/SS光电极的形貌和化学状态。图中还展示了不锈钢薄膜在反应前后的元素分布和化学状态变化。
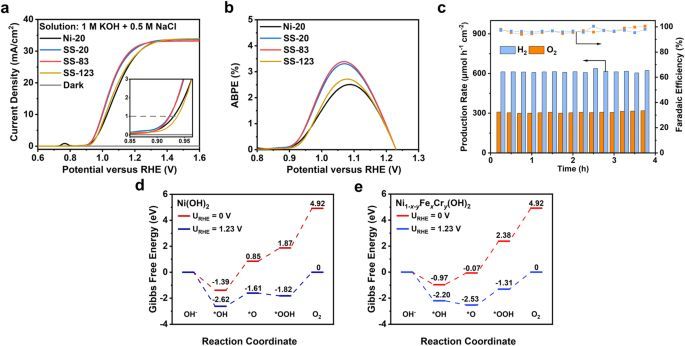
图3:展示了不同不锈钢薄膜厚度对光电极性能的影响。通过电流-电压(J-V)曲线和ABPE曲线,可以看出SS-83样品在含氯碱性电解液中展现出最佳的光电化学性能。
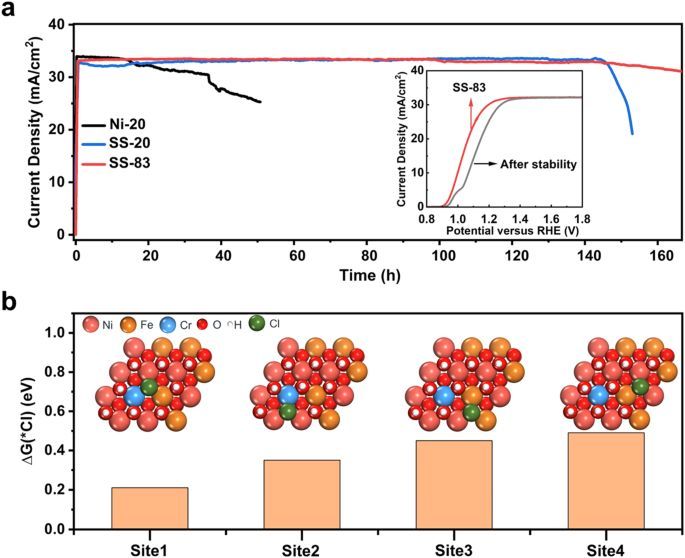
图4:通过稳定性测试和DFT计算结果,分析了Cl-对光电极稳定性的影响。图中还展示了不锈钢薄膜在稳定性测试前后的表面形貌和结构变化。
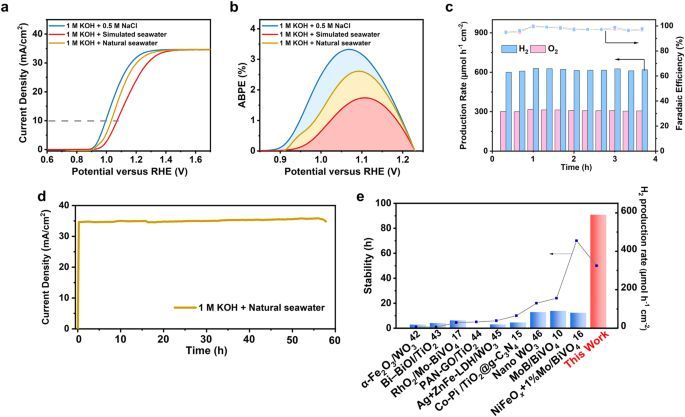
图5:展示了HJ-Si/TiO2/SS-83光电极在碱性自然海水中的光电化学性能。通过J-V曲线和ABPE曲线,可以看出光电极在自然海水中仍然保持较高的性能。
亮点介绍
1. 创新设计了TiO2/不锈钢双层结构,有效保护硅光电极免受海水中腐蚀性离子的侵害。
2. 通过电化学重构,不锈钢薄膜转化为含铬的NiFe(氧)氢氧化物,显著提升了氧气进化反应的催化活性。
3. 实现了在含氯碱性电解液中长达167小时的稳定性能,以及在碱性自然海水中超过50小时的稳定运行。
4. 达到了2.62%的光子转换效率,为太阳能海水分解提供了高效且稳定的解决方案。
计算模拟
通过密度泛函理论(DFT)计算,研究了Ni1−x−yFexCry(OH)2和Ni(OH)2的氧进化反应(OER)机制。计算了在不同电位下OER中间体的吉布斯自由能,以评估其催化活性。
DFT计算结果表明,Ni1−x−yFexCry(OH)2相比于Ni(OH)2在OER过程中显示出更低的反应能垒,这与实验中观察到的优异的起始电位和ABPE一致。
此外,DFT计算还揭示了Cl−在Ni1−x−yFexCry(OH)2上的吸附能力减弱,有助于抑制腐蚀过程和提高光电极的稳定性。
文献信息
标题:A silicon photoanode protected with TiO2/stainless steel bilayer stack for solar seawater splitting
期刊:Nature Communications















 202
202

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









