







2.从H桥说起-电机驱动原理介绍
写在前面
- 当前平台文章汇总地址:ROS2机器人从入门到实战
- 获取完整教程及配套资料代码,请关注公众号<鱼香ROS>获取
- 教程配套机器人开发平台:两驱版| 四驱版
- 为方便交流,搭建了机器人技术问答社区:地址 fishros.org.cn
你好,我是小鱼,本节我们尝试通过代码让机器人上的电机动起来。
一、电机驱动原理介绍
正式编写代码前,我们先了解下电机驱动的原理,以便于我们了解我们如何才能通过代码控制电机的转速和正反转。
1.1 H桥电路
让电机动起来只需要通电就行,比如我们用的额定电压为12V 130RPM的电机,当给到12V的电压时可以达到额定转速130转/分,但如果我们给8V的电压,此时电机依然可以转动,但转速就相对较低。
只是转起来还不行,要想控制机器人前进后退,左转右转,我们还需要控制轮子的转的方向,想要控制转速我们则需要控制给到电机的电压。
H桥(H-Bridge)电路可以帮我们实现上面两个功能,之所以叫H桥,因为这个电路长的像H。通过该电路可以将电源电压正向或反向地施加到电动机上,从而实现正向、反向转动和制动等功能。
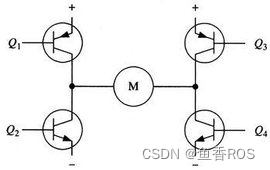
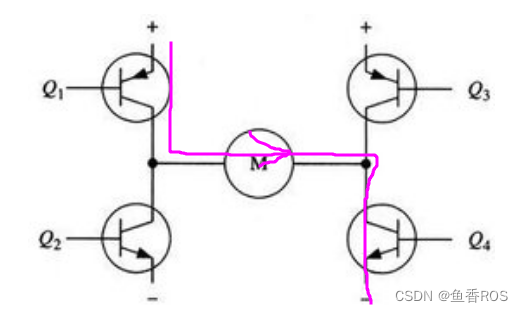
该电路由四个独立开关管(MOSFET)组成,在H桥电路中,两个开关管组成一对,如上图所示。当我们接通Q1和Q4,关闭Q3和Q2时,电源电压正向施加到电动机上,使其正向转动。
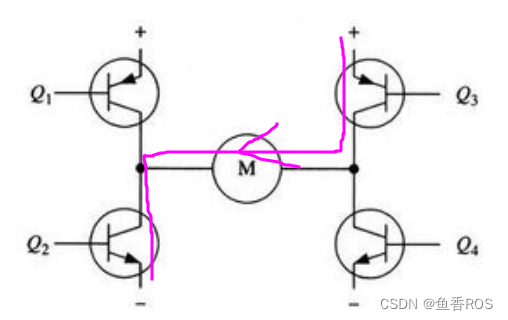
我们关闭Q1和Q4,接通Q2和Q3时,电源电压反向施加到电动机上,使其反向转动。
在制动时,同时关闭四个开关管,这样电动机会在短时间内停止转动。另外,通过之前介绍的在PWM(脉宽调制)控制下,可以通过改变开关管的开关时间比例,就可以实现电动机的速度控制。
1.2 原理图
看完H桥电路原理,我们来讲讲在FishBot主控板上如何搭载的该电路的。在开发板上我们采用了一款H桥电路芯片DRV8833来实现电机的驱动。
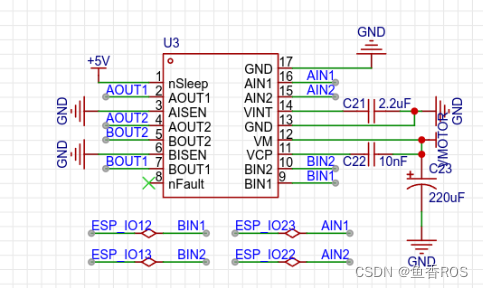
该电路原理图如上图所示,我们通过AIN1(IO23)的高低电平控制H桥中Q1和Q4的开关,通过AIN2(IO22)控制Q2和Q3的开关,所以我们在程序中通过控制AIN1和AIN2的高低电平变化就可以完成对电机正反转的控制。















 3844
3844











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









