









 文章描述了一个使用ROS(RobotOperatingSystem)的节点,用于检测无人机巡线过程中线段的角度和横向偏移。通过处理来自相机的图像,应用HSV色彩空间和轮廓分析技术来定位特定颜色的线,并计算期望的偏航和速度指令。
文章描述了一个使用ROS(RobotOperatingSystem)的节点,用于检测无人机巡线过程中线段的角度和横向偏移。通过处理来自相机的图像,应用HSV色彩空间和轮廓分析技术来定位特定颜色的线,并计算期望的偏航和速度指令。
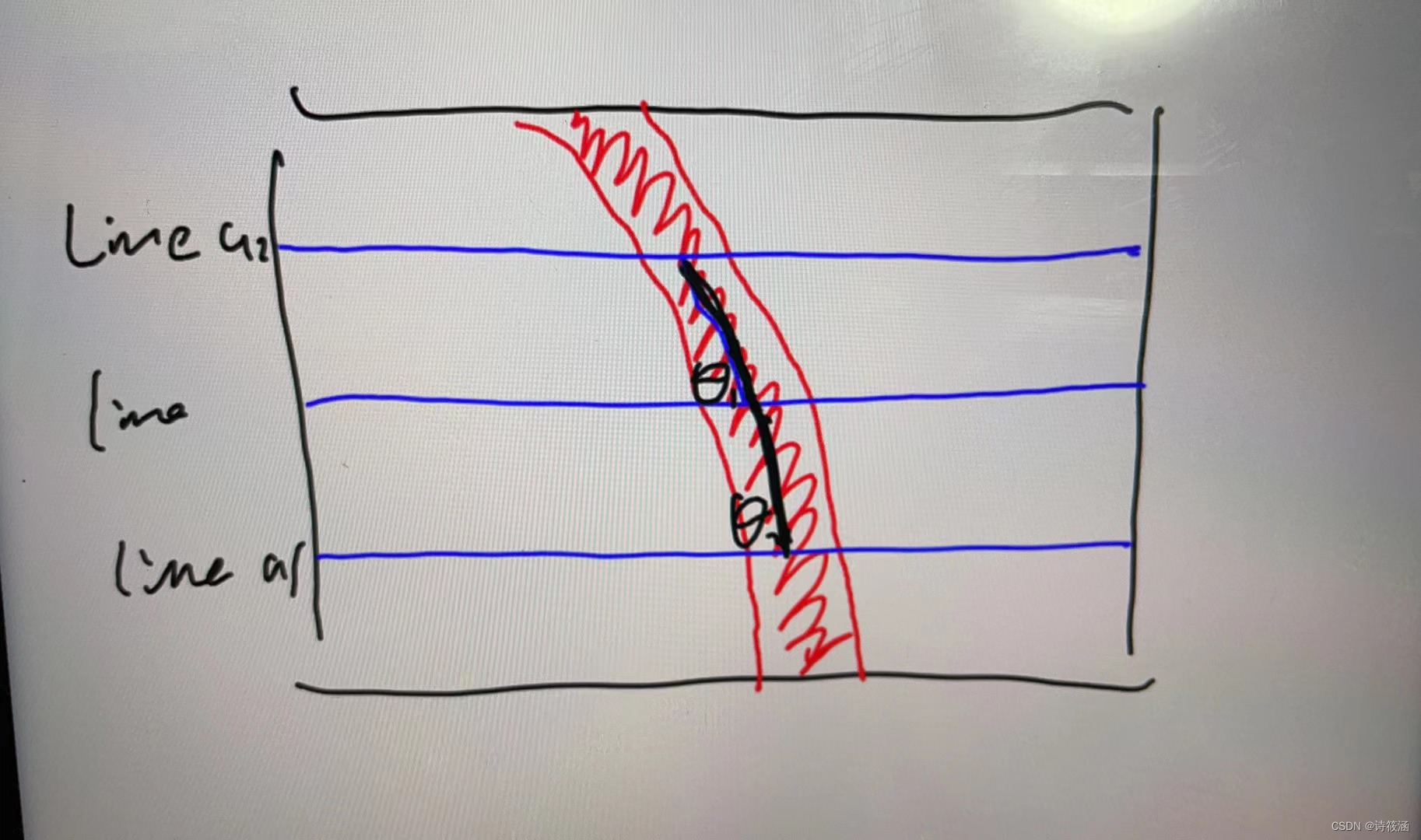
巡线节点得到角度和横向偏移量,进而给无人机发送期望偏航和期望的横向速度,高度发送恒定期望高度即可。
#!/usr/bin/env python
# -*- coding: utf-8 -*-
import rospy
from sensor_msgs.msg import Image
from geometry_msgs.msg import Pose, Point, Quaternion
from cv_bridge import CvBridge
from std_msgs.msg import String
from std_msgs.msg import Bool
import numpy as np
import cv2
import os
import yaml
import math
# 线距底边的距离,0-1,0.5表示在图像中间
# 待检测颜色,没有此颜色时,默认检测黑色
# 可选:black,red,yellow,green,blue
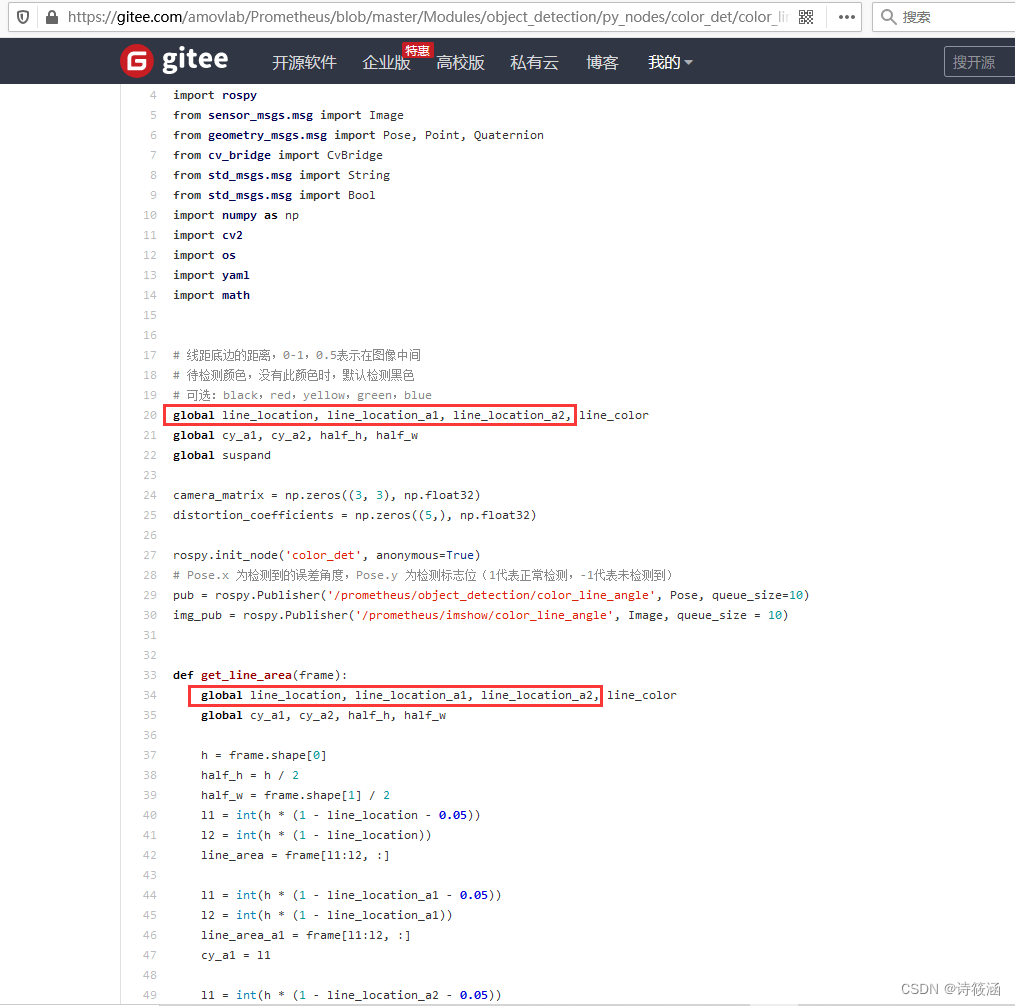
global line_location, line_location_a1, line_location_a2, line_color
global cy_a1, cy_a2, half_h, half_w
global suspand
camera_matrix = np.zeros((3, 3), np.float32)
distortion_coefficients = np.zeros((5,), np.float32)
rospy.init_node('color_det', anonymous=True)
# Pose.x 为检测到的误差角度,Pose.y 为检测标志位(1代表正常检测,-1代表未检测到)
pub = rospy.Publisher('/prometheus/object_detection/color_line_angle', Pose, queue_size=10)
img_pub = rospy.Publisher('/prometheus/imshow/color_line_angle', Image, queue_size = 10)
def get_line_area(frame):
global line_location, line_location_a1, line_location_a2, line_color
global cy_a1, cy_a2, half_h, half_w
h = frame.shape[0]
half_h = h / 2
half_w = frame.shape[1] / 2
l1 = int(h * (1 - line_location - 0.05))
l2 = int(h * (1 - line_location))
line_area = frame[l1:l2, :]
l1 = int(h * (1 - line_location_a1 - 0.05))
l2 = int(h * (1 - line_location_a1))
line_area_a1 = frame[l1:l2, :]
cy_a1 = l1
l1 = int(h * (1 - line_location_a2 - 0.05))
l2 = int(h * (1 - line_location_a2))
cy_a2 = l1
line_area_a2 = frame[l1:l2, :]
return line_area, line_area_a1, line_area_a2
def cnt_area(cnt):
area = cv2.contourArea(cnt)
return area
def seg(line_area, line_area_a1, line_area_a2, _line_color='black'):
if _line_color == 'black':
hmin, smin, vmin = 0, 0, 0
hmax, smax, vmax = 180, 255, 46
elif _line_color == 'red':
hmin, smin, vmin = 0, 43, 46
hmax, smax, vmax = 10, 255, 255
elif _line_color == 'yellow':
hmin, smin, vmin = 26, 43, 46
hmax, smax, vmax = 34, 255, 255
elif _line_color == 'green':
hmin, smin, vmin = 35, 43, 46
hmax, smax, vmax = 77, 255, 255
elif _line_color == 'blue':
hmin, smin, vmin = 100, 43, 46
hmax, smax, vmax = 124, 255, 255
else:
hmin, smin, vmin = 0, 0, 0
hmax, smax, vmax = 180, 255, 46
line_area = cv2.cvtColor(line_area, cv2.COLOR_BGR2HSV)
line_area = cv2.inRange(line_area, (hmin, smin, vmin), (hmax, smax, vmax))
kernel = np.ones((5, 5), np.uint8)
line_area = cv2.morphologyEx(line_area, cv2.MORPH_OPEN, kernel)
# cv2.MORPH_CLOSE 先进行膨胀,再进行腐蚀操作
kernel = np.ones((5, 5), np.uint8)
line_area = cv2.morphologyEx(line_area, cv2.MORPH_CLOSE, kernel)
image, contours, hierarchy = cv2.findContours(line_area, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
contours.sort(key=cnt_area, reverse=True)
center = (0, 0)
area = -1
if len(contours) > 0:
x, y, w, h = cv2.boundingRect(contours[0])
cx, cy = int(x + w/2), int(y + h/2)
area = cnt_area(contours[0])
center = (cx, cy)
line_area_a1 = cv2.cvtColor(line_area_a1, cv2.COLOR_BGR2HSV)
line_area_a1 = cv2.inRange(line_area_a1, (hmin, smin, vmin), (hmax, smax, vmax))
kernel = np.ones((5, 5), np.uint8)
line_area_a1 = cv2.morphologyEx(line_area_a1, cv2.MORPH_OPEN, kernel)
# cv2.MORPH_CLOSE 先进行膨胀,再进行腐蚀操作
kernel = np.ones((5, 5), np.uint8)
line_area_a1 = cv2.morphologyEx(line_area_a1, cv2.MORPH_CLOSE, kernel)
image, contours_a1, hierarchy = cv2.findContours(line_area_a1, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
contours_a1.sort(key=cnt_area, reverse=True)
global cy_a1, cy_a2, half_h, half_w
center_a1 = (0, 0)
if len(contours_a1) > 0:
x, y, w, h = cv2.boundingRect(contours_a1[0])
cx, cy = int(x + w/2), int(y + h/2) + cy_a1
center_a1 = (cx - half_w, cy - half_h)
line_area_a2 = cv2.cvtColor(line_area_a2, cv2.COLOR_BGR2HSV)
line_area_a2 = cv2.inRange(line_area_a2, (hmin, smin, vmin), (hmax, smax, vmax))
kernel = np.ones((5, 5), np.uint8)
line_area_a2 = cv2.morphologyEx(line_area_a2, cv2.MORPH_OPEN, kernel)
# cv2.MORPH_CLOSE 先进行膨胀,再进行腐蚀操作
kernel = np.ones((5, 5), np.uint8)
line_area_a2 = cv2.morphologyEx(line_area_a2, cv2.MORPH_CLOSE, kernel)
image, contours_a2, hierarchy = cv2.findContours(line_area_a2, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
contours_a2.sort(key=cnt_area, reverse=True)
center_a2 = (0, 0)
if len(contours_a2) > 0:
x, y, w, h = cv2.boundingRect(contours_a2[0])
cx, cy = int(x + w/2), int(y + h/2) + cy_a2
center_a2 = (cx - half_w, cy - half_h)
return line_area, center, area, center_a1, center_a2
def image_callback(imgmsg):
global line_location, line_location_a1, line_location_a2, line_color
rate = rospy.Rate(10) # 10hz
if suspand:
rate.sleep()
else:
bridge = CvBridge()
frame = bridge.imgmsg_to_cv2(imgmsg, "bgr8")
# processing
area_base, area_base_a1, area_base_a2 = get_line_area(frame)
area, cxcy, a, center_a1, center_a2 = seg(area_base, area_base_a1, area_base_a2, _line_color=line_color)
pose = Pose(Point(0, -1, 0), Quaternion(center_a1[0], center_a1[1], center_a2[0], center_a2[1]))
if a > 0:
cv2.circle(area, (cxcy[0], cxcy[1]), 4, (0, 0, 255), -1)
angle = (cxcy[0] - camera_matrix[0,2]) / camera_matrix[0,2] * math.atan((area.shape[1] / 2) / camera_matrix[0,0])
pose = Pose(Point(angle, 1, 0), Quaternion(center_a1[0], center_a1[1], center_a2[0], center_a2[1]))
else:
area, cxcy, a, center_a1, center_a2 = seg(area_base, area_base_a1, area_base_a2,)
if a > 0:
cv2.circle(area, (cxcy[0], cxcy[1]), 4, (0, 0, 255), -1)
angle = (cxcy[0] - camera_matrix[0,2]) / camera_matrix[0,2] * math.atan((area.shape[1] / 2) / camera_matrix[0,0])
pose = Pose(Point(angle, 1, 0), Quaternion(center_a1[0], center_a1[1], center_a2[0], center_a2[1]))
pub.publish(pose)
# end
## maxi add -----
#hmin1, smin1, vmin1 = 0, 0, 0
#hmax1, smax1, vmax1 = 180, 255, 46
#maxi_area = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
#maxi_area = cv2.inRange(maxi_area, (hmin1, smin1, vmin1), (hmax1, smax1, vmax1))
##maxi_area = cv2.inRange(frame, (hmin1, smin1, vmin1), (hmax1, smax1, vmax1))
#kernel = np.ones((5, 5), np.uint8)
#maxi_area = cv2.morphologyEx(maxi_area, cv2.MORPH_OPEN, kernel)
#kernel = np.ones((5, 5), np.uint8)
#maxi_area = cv2.morphologyEx(maxi_area, cv2.MORPH_CLOSE, kernel)
##cv2.circle(maxi_area, (cxcy[0]+half_w, cxcy[1]+half_h), 4, (0, 0, 255), -1)
#cv2.circle(maxi_area, (center_a1[0]+320, center_a1[1]+240), 4, (125, 125, 125), -1)
#cv2.circle(maxi_area, (center_a2[0]+320, center_a2[1]+240), 4, (125, 125, 125), -1)
##cv2.circle(maxi_area, (cxcy[0], half_h), 4, (125, 125, 125), -1)
#cv2.imshow("cap", frame)
#cv2.imshow("area", area)
#cv2.imshow("maxi_area", maxi_area)
#cv2.waitKey(1)
## maxi add -----
h, w = frame.shape[:2]
img_resize = 360
if h > w:
h = int(float(h) / w * img_resize)
w = img_resize
else:
w = int(float(w) / h * img_resize)
h = img_resize
frame = cv2.resize(frame, (w, h))
# cv2.imshow("cap", frame)
# cv2.imshow("area", area)
# cv2.waitKey(10)
img_pub.publish(bridge.cv2_to_imgmsg(frame, "bgr8"))
def color_det(topic_name):
rospy.Subscriber(topic_name, Image, image_callback)
rospy.spin()
def switch_callback(boolmsg):
global suspand
suspand = not boolmsg.data
if __name__ == '__main__':
global line_location, line_color
subscriber = rospy.get_param('~camera_topic', '/prometheus/camera/rgb/image_raw')
config = rospy.get_param('~camera_info', 'camera_param.yaml')
#config = rospy.get_param('~config', 'camera_param.yaml')
# 接收开关消息,判断程序挂起还是执行
rospy.Subscriber('/prometheus/switch/color_line_det', Bool, switch_callback)
global suspand
suspand = False
# global line_location, line_color
line_location = rospy.get_param('~line_location', 0.5)
line_location_a1 = rospy.get_param('~line_location_a1', 0.3)
line_location_a2 = rospy.get_param('~line_location_a2', 0.7)
line_color = rospy.get_param('~line_color', 'black')
yaml_config_fn = config
print('Input config file: {}'.format(config))
yaml_config = yaml.load(open(yaml_config_fn))
camera_matrix[0,0] = yaml_config['fx']
camera_matrix[1,1] = yaml_config['fy']
camera_matrix[2,2] = 1
camera_matrix[0,2] = yaml_config['x0']
camera_matrix[1,2] = yaml_config['y0']
print(camera_matrix)
distortion_coefficients[0] = yaml_config['k1']
distortion_coefficients[1] = yaml_config['k2']
distortion_coefficients[2] = yaml_config['p1']
distortion_coefficients[3] = yaml_config['p2']
distortion_coefficients[4] = yaml_config['k3']
print(distortion_coefficients)
try:
color_det(subscriber)
except rospy.ROSInterruptException:
pass
这里也是取一行图像,检测黑线的位置,剩下就是PID了。
【第24课.机器人巡线代码讲解-哔哩哔哩】 https://b23.tv/7ySMocT
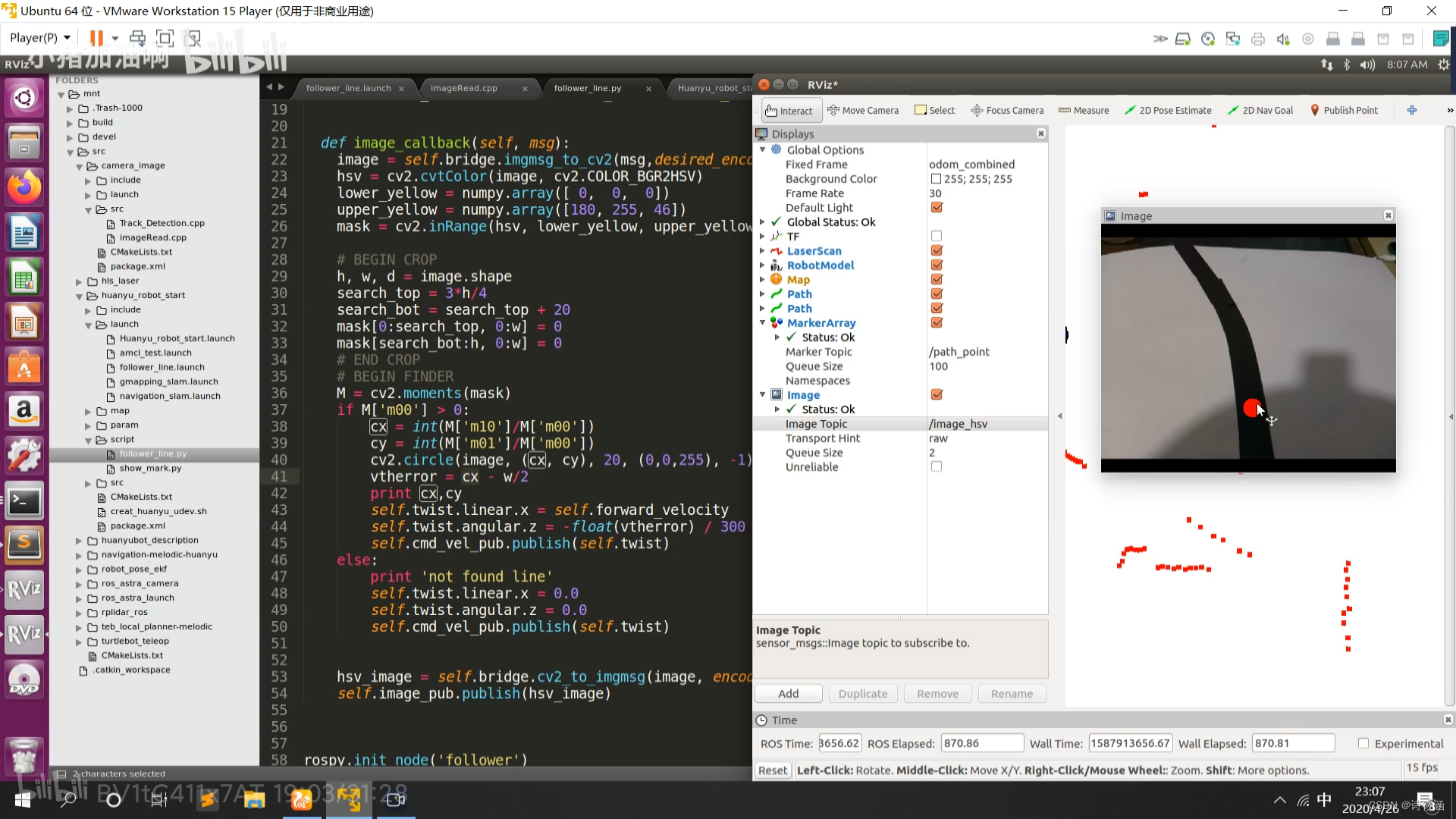
也可以自己基于基本原理写个简单的巡线,取图像的某一行,这个操作不难,相当于新建一个图像,只不过高是1。在这一行图像里面筛选出指定像素值范围的点,比如黑色的,然后取这些点横坐标的平均值,根据这个位置就可以进行一个基础简单的巡线了。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











