









转载自 MAVLink系列——实战一:通过UDP发送MAVLink消息(python版本) - 知乎
MAVLink 实战一:通过UDP发送MAVLink消息
参考
MAVLink GitHub源码地址:https://github.com/mavlink/mavlink
MAVLink官方文档:https://mavlink.io/en/messages/common.html
本节内容
- 学习python UDP编程
- 学习QGC的简单使用
- 实现基于UDP的MAVLink消息发送
所有代码都在gitee上:https://gitee.com/wujinDrone/mavlink_tutorial#https://www.yuque.com/u21969096/cez3q8
环境配置说明
- 软硬件
我们这边的所有编程都是基于Ubuntu(18.04),请准备好装有Ubuntu环境计算机。我们编程使用的python3.6,Ubuntu已经默认自带了。
请提前安装好QGC,具体安装方法参考官网说明。
- MAVLink库代码
根据上一节,MAVLink库的生成说明,生成一个V2版本的Python库,重名名为mavlink.py文件并放到一个文件夹下如mavlink_learn,然后在同级目录下新建一个mavcrc.py文件,填入如下代码:
'''
MAVLink X25 CRC code
Copyright Andrew Tridgell
Released under GNU LGPL version 3 or later
'''
from builtins import object
class x25crc(object):
'''x25 CRC - based on checksum.h from mavlink library'''
def __init__(self, buf=None):
self.crc = 0xffff
if buf is not None:
if isinstance(buf, str):
self.accumulate_str(buf)
else:
self.accumulate(buf)
def accumulate(self, buf):
'''add in some more bytes'''
accum = self.crc
for b in buf:
tmp = b ^ (accum & 0xff)
tmp = (tmp ^ (tmp<<4)) & 0xFF
accum = (accum>>8) ^ (tmp<<8) ^ (tmp<<3) ^ (tmp>>4)
self.crc = accum
def accumulate_str(self, buf):
'''add in some more bytes'''
accum = self.crc
import array
bytes = array.array('B')
bytes.fromstring(buf)
self.accumulate(bytes)现在我们当前文件夹目录结构如下:
|--mavlink_learn/
|-- mavlink.py
|-- mavcrc.py最后,你需要修改下mavlink.py文件中mavrcrc的导入路径,只需要将第13行:
from ...generator.mavcrc import x25crc更改为:
from mavcrc import x25crc即可。
UDP基础
UDP是面向无连接的不可靠数据传输,不想TCP那样有三次握手,UDP只负责发送,不负责确认对方是否收到数据,也没有重传机制,这些都需要用户自己实现。但UDP简单好用,例如基于PX4的gazebo仿真就用到UDP作为通信方式。
python UDP通信是通过导入socket包来实现。
- 发送
函数: sendto(data, addr)
其中data为字节数组,如b'hello world',addr为地址和端口组成的tuple,例如('127.0.0.1', 14550)。
- 接收
函数: data = recvfrom(len)
其中len为接收长度,例如len=1024即最大读取1024个字节,返回值为字节数组。
UDP客户端-服务端通信
首先我们编写一个简单的客户端-服务端的通信示例:
服务端代码udp_server.py为:
import socket
import time
BUFSIZE = 1024
def main():
ip_port = ('', 14550)
server = socket.socket(socket.AF_INET, socket.SOCK_DGRAM)
server.bind(ip_port)
while True:
data, addr = server.recvfrom(BUFSIZE)
print('Received frome {}:'.format(addr))
print(data)
response = b"Hello, this server1, I received: "
server.sendto(response + data, addr)
server.close()
if __name__ == '__main__':
main()客户端代码udp_client.py为:
import socket
import time
BUFSIZE = 1024
def main():
client = socket.socket(socket.AF_INET,socket.SOCK_DGRAM)
ip_port = ('127.0.0.1', 14550)
client.sendto(b"hello this is udp client",ip_port)
data, addr = client.recvfrom(BUFSIZE)
print("Received from: {}".format(addr))
print(data)
client.close()
if __name__ == '__main__':
main()先运行在一个终端运行服务端,然后打开另外一个终端运行客户端(连续运行两次),有如下结果:
# 服务端
$ python3 udp_server.py
Received frome ('127.0.0.1', 45174):
b'hello this is udp client'
Received frome ('127.0.0.1', 51441):
b'hello this is udp client'
# 客户端
$ python3 udp_client.py
Received from: ('127.0.0.1', 14550)
b'Hello, this server1, I received: hello this is udp client'
$ python3 udp_client.py
Received from: ('127.0.0.1', 14550)
b'Hello, this server1, I received: hello this is udp client'UDP服务端-服务端通信
通过客户端编程我们可以看到,客户端没有绑定本地端口,发送时只要指定发送的目的IP和Port即可,将随机绑定一个本地端口。故上面的结果也显示,启动两次客户端,服务端接收的端口是不一样的!
而很多时候,我们进行UDP通信时,两边都需要绑定本地端口!这个时候我们可以采用服务端和服务端通信方式!
新建一个服务端,命名为udp_server2.py,添加如下代码:
import socket
import time
BUFSIZE = 1024
def main():
ip_port = ('', 14540)
server2 = socket.socket(socket.AF_INET, socket.SOCK_DGRAM)
server2.bind(ip_port)
des_addr = ('127.0.0.1', 14550)
while True:
data_send = b"Hello, this server2: "
server2.sendto(data_send, des_addr)
data, addr = server2.recvfrom(BUFSIZE)
print('Recived from {}:'.format(addr))
print(data)
time.sleep(1)
server2.close()
if __name__ == '__main__':
main()先运行服务端1,然后再启动服务端2,有:
# 服务端1
$ python3 udp_server.py
Received frome ('127.0.0.1', 14540):
b'Hello, this server2: '
Received frome ('127.0.0.1', 14540):
b'Hello, this server2: '
# 服务端2
$ python3 udp_server2.py
Recived from ('127.0.0.1', 14550):
b'Hello, this server1, I received: Hello, this server2: '
Recived from ('127.0.0.1', 14550):
b'Hello, this server1, I received: Hello, this server2: '发送MAVLink消息
在一开始学习时,特别涉及到通信编程,为了保证至少有一端是完全没问题的,我们最好采用现有的工具作为接收或发送端!不然出现无法通信的情况,不好确定你的代码到底是接收端有问题还是发送端写的有问题。
这里我们使用QGC作为通信的一端,用于接收数据,接下来我们编写MAVLink数据的发送端部分!
QGC设置
- 启动QGC
$ ./Desktop/QGroundControl.AppImage- 新建一个通信连接
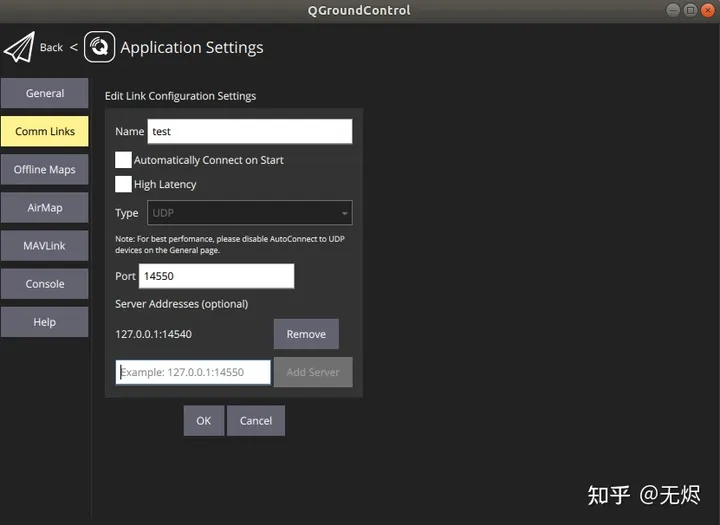
打开主菜单,选择Application Settings->Comm Links,新建一个UDP连接,本地端口填写14550,服务端地址填写127.0.0.1:14540。
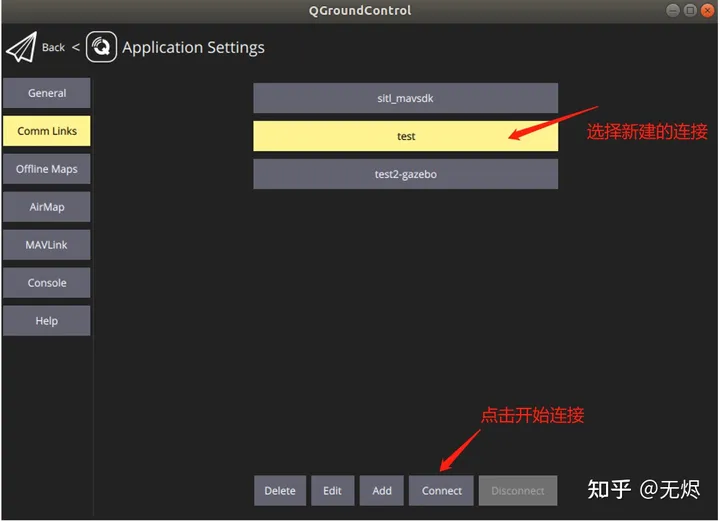
- 创建完成后选择这个连接,然后点击Connect,这样QGC将会等等连接。
注意,如果启动后,不建立这个连接也没关系,因为这个连接对应的本地端口和远程服务端口比较特殊,是PX4飞控和QGC通信的默认端口,14550会一直在QGC监听中,收到消息会自动处理!
连接QGC
为了与QGC建立一个通信,我们创建一个“无人机”,这个“无人机”当然不是一个真实的,但能够模仿无人机发送一些基本数据,最核心的数据就是呼吸包——Heartbeat消息,这个消息包含了无人机基本信息如类型、id、模式等等。
我们新建一个测试文件test_sim_drone_udp_send.py,添加如下代码:
#!/usr/bin/env python3
import time
import socket
from mavlink import *
class DeviceUdp(object):
"""
"""
def __init__(self, local_addr, target_addr=None):
self.dev = None
self.local_addr = local_addr
self.target_addr = target_addr
self.dev = socket.socket(socket.AF_INET, socket.SOCK_DGRAM)
self.dev.bind(self.local_addr)
def write(self, buf):
send_callback = self.dev.sendto(buf, self.target_addr)
local_addr = ('', 14540)
target_addr = ('127.0.0.1', 14550)
dev = DeviceUdp(local_addr, target_addr)
sys_id = 1
cmp_id = 1
mav = MAVLink(dev, sys_id, cmp_id)
for i in range(10):
msg = MAVLink_heartbeat_message(MAV_TYPE_QUADROTOR,
MAV_AUTOPILOT_PX4, MAV_MODE_PREFLIGHT, 0x60000, MAV_STATE_STANDBY, 2)
mav.send(msg)
time.sleep(1)
print("Send heartbeat {}-th".format(i))接下来运行这个代码:
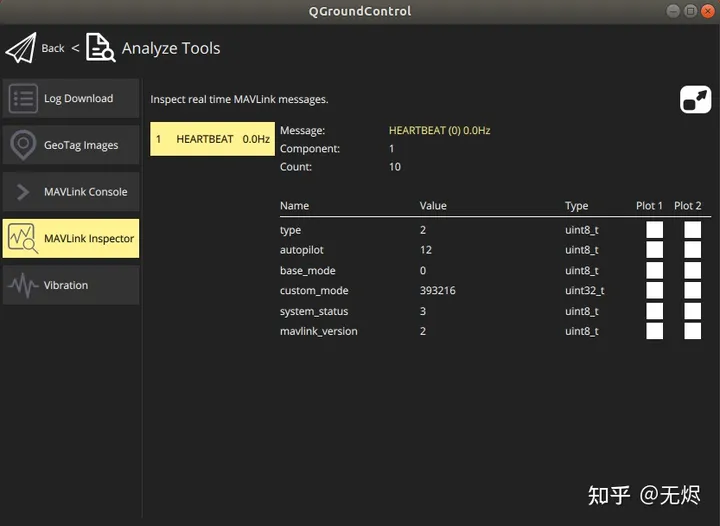
$ python3 test_sim_drone_udp_send.py然后便能够听到QGC建立无人机连接的提示声音,然后在主菜单打开Analyze Tools->MAVLink Inspector后,可以看到已经收到了HEARTBEAT消息!
代码详解
1、MAVLink类
MAVLink类辅助处理MAVLink通信,包括消息的发送、解析。其__init__函数重要部分如下:
def __init__(self, file, srcSystem=0, srcComponent=0, use_native=False):
self.seq = 0
self.file = file
self.srcSystem = srcSystem
self.srcComponent = srcComponent- file: 表示实现底层信息传输如网络传输、串口传输的对象,由于MAVLink不负责底层硬件如网卡、串口的操作,所有需要使用者给定。这个对象必须有一个write成员函数,用来实现字节数组的发送!
我们把这个file当做是一个负责底层数据传输的设备!
- srcSystem: 指定本机的system_id,这样接收者才能知道本地的“身份信息”;
- srcComponent:指定本机的component_id,这样接收者才能知道本地的“身份信息”;
所以以下三行代码就是实例化一个MAVLink对象:
sys_id = 1
cmp_id = 1
mav = MAVLink(dev, sys_id, cmp_id)2、DeviceUdp类
这个是使用UDP进行底层数据传输的设备!
这个类是用户必须实现的,它定义了底层数据传输的接口,这里我们选择了UDP传输,故这个类就是实现了UDP连接的初始化以及数据发送接口函数——write,这个函数只需要一个参数即可,就是字节数组buf,然后通过UDP的sendto方法将这个数组发送出去!
def write(self, buf):
send_callback = self.dev.sendto(buf, self.target_addr)3、消息生成
根据使用者的意图,需要找到对应的MAVLink消息,每个消息(因平台特殊定义的除外)的内容都可以在官网或者下载的源码mavlink-master/message_definitions/v1.0/common.xml或者minimal.xml中找到具体定义。
MAVLink库将每个消息都进行了类实现!例如HEARTBEAT ( #0 )对应的类就是MAVLink_heartbeat_message,我们在进行消息生成时就是实例化了消息类而已,根据消息定义填入参数即可!
msg = MAVLink_heartbeat_message(MAV_TYPE_QUADROTOR,
MAV_AUTOPILOT_PX4, MAV_MODE_PREFLIGHT, 0x60000, MAV_STATE_STANDBY, 2)4、消息发送
MAVLink提供了send(mavmsg)成员函数用于发送消息,如下:
mav.send(msg)还记得我们前面说过,消息的底层发送需要使用者来实现吗?
前面我们创建了DeviceUdp类并且创建了write方法,其实在调用mav.send(msg)时,send函数会调用DeviceUdp.write,从而实现了数据传输!
############# mavlink.py ###############
class MAVLink(object):
def __init__(self, file, srcSystem=0, srcComponent=0, use_native=False):
self.file = file
def send(self, mavmsg, force_mavlink1=False):
'''send a MAVLink message'''
buf = mavmsg.pack(self, force_mavlink1=force_mavlink1)
### 调用使用者定义的设备类的write方法进行传输
self.file.write(buf)
###
############# test_sim_drone_udp_send.py ###############
mav = MAVLink(dev, sys_id, cmp_id)发布于 2021-09-29 10:15

















 888
888

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









